You might also like
- LEC. (1) - Kinematics of Rigid Bodies-Definitions-Translation-Rotational Motion-ExamplesDocument7 pagesLEC. (1) - Kinematics of Rigid Bodies-Definitions-Translation-Rotational Motion-ExamplesfadyNo ratings yet
- Planar Kinematics of A Rigid BodyDocument13 pagesPlanar Kinematics of A Rigid BodyMagicWand2No ratings yet
- Dynamics of Rigid BodyDocument15 pagesDynamics of Rigid BodyZareef ZaNo ratings yet
- Flight Direction Cosine MatrixDocument11 pagesFlight Direction Cosine MatrixsazradNo ratings yet
- BreathControl PDFDocument11 pagesBreathControl PDFClaudio Andrés Mendez CerdaNo ratings yet
- MechanicsDocument105 pagesMechanicsBeesam Ramesh KumarNo ratings yet
- 2012-1811. Robot Arm Kinematics DH IntroDocument75 pages2012-1811. Robot Arm Kinematics DH IntroRana UsmanNo ratings yet
- Rigid Body Dynamics - Chap 16Document60 pagesRigid Body Dynamics - Chap 16Na2ryNo ratings yet
- 16 1 Translation and Rotation of Rigid Body PDFDocument24 pages16 1 Translation and Rotation of Rigid Body PDFSindhu BabuNo ratings yet
- BlastingDocument138 pagesBlastingcklconNo ratings yet
- Use of Force ContinuumDocument1 pageUse of Force ContinuumNyloc100% (1)
- IGEM-UP-1C Draft For Comment - 2nd Consultation (IGEM-TSP-10-122)Document54 pagesIGEM-UP-1C Draft For Comment - 2nd Consultation (IGEM-TSP-10-122)eastway98100% (2)
- Chapter 16 Planar Kinematics of Rigid BodyDocument52 pagesChapter 16 Planar Kinematics of Rigid BodyMuhd HaqimNo ratings yet
- 16 PDFDocument129 pages16 PDFgNo ratings yet
- Chapter 16 Kinematics of Rigid BodiesDocument62 pagesChapter 16 Kinematics of Rigid BodiesRose Rivera-NasolNo ratings yet
- Planar Kinematics of A Rigid Body: Ir. Dr. Mohd Noor Arib Bin MD RejabDocument23 pagesPlanar Kinematics of A Rigid Body: Ir. Dr. Mohd Noor Arib Bin MD RejabYipNo ratings yet
- Tad2 - Functional Concepts and The Interior EnvironmentDocument10 pagesTad2 - Functional Concepts and The Interior EnvironmentJay Reyes50% (2)
- 16 Planar Kinematics of Rigid BodyDocument47 pages16 Planar Kinematics of Rigid BodyzackziffiNo ratings yet
- Hughes Consciousness and Society 1958Document468 pagesHughes Consciousness and Society 1958epchot100% (1)
- Part 2: Dynamics: Chapter No 16Document54 pagesPart 2: Dynamics: Chapter No 16Farhan ShahriarNo ratings yet
- Planar Kinematics of A Rigid Body - Module 2Document12 pagesPlanar Kinematics of A Rigid Body - Module 2Arthur Satria YahyadiNo ratings yet
- Chapter Three Kinematics of Rigid Bodies: 3-1 Introduction To DynamicsDocument8 pagesChapter Three Kinematics of Rigid Bodies: 3-1 Introduction To DynamicsIsshi Mia Mae DecasaNo ratings yet
- CH11 Rolling, Torque, and Angular MomentumDocument18 pagesCH11 Rolling, Torque, and Angular MomentumOğulcan KüçükNo ratings yet
- Planar Kinematics of A Rigid BodyDocument74 pagesPlanar Kinematics of A Rigid BodymarcosbispolimaNo ratings yet
- CH 16Document60 pagesCH 16Abdallah OdeibatNo ratings yet
- Chapter 16: Planar Kinematics of A Rigid BodyDocument58 pagesChapter 16: Planar Kinematics of A Rigid BodyineedchemicalxNo ratings yet
- Plane: KinematicsDocument87 pagesPlane: KinematicsAhmed Sobhi l أحمد صبحيNo ratings yet
- Group 1 Dorb001 Bsce3aDocument16 pagesGroup 1 Dorb001 Bsce3aJan TheGamerNo ratings yet
- Chapter 5. Planar Kinematics of Rigid BodiesDocument29 pagesChapter 5. Planar Kinematics of Rigid BodiesDivnesh Lingam100% (1)
- Lecture 14 B8 BDocument20 pagesLecture 14 B8 BInformative ChannelNo ratings yet
- DymanicsDocument40 pagesDymanicsahmadNo ratings yet
- Planar Kinematics of A Rigid Body - Module 4Document18 pagesPlanar Kinematics of A Rigid Body - Module 4Arthur Satria YahyadiNo ratings yet
- Fiz138 w11-ch11Document16 pagesFiz138 w11-ch11mustafadershesabiNo ratings yet
- Part 3 - Rev1Document42 pagesPart 3 - Rev1jk.fajardo4No ratings yet
- Dynamics1 5Document14 pagesDynamics1 5caganhasNo ratings yet
- Chapter 16 Planar Kinematics of Rigid BodyDocument47 pagesChapter 16 Planar Kinematics of Rigid Bodyrana abdul waasay0% (1)
- 016 - Mit8 - 01scs22 - Chapter16 PDFDocument22 pages016 - Mit8 - 01scs22 - Chapter16 PDFkevinchu021195No ratings yet
- Chapter 16 Planar Kinematics of Rigid BodyDocument51 pagesChapter 16 Planar Kinematics of Rigid BodyDawood AbdullahNo ratings yet
- Notes On Theory of MachineDocument15 pagesNotes On Theory of MachineKhalil Al MahdiNo ratings yet
- Module 5 Planar Kinematics of A Rigid BodyDocument104 pagesModule 5 Planar Kinematics of A Rigid BodyHuy VũNo ratings yet
- Velocity and Acceleration (Autosaved)Document63 pagesVelocity and Acceleration (Autosaved)kefiyalew agegnNo ratings yet
- ch10 RotacaoDocument18 pagesch10 RotacaoJosé SearaNo ratings yet
- Chapter Four Plane Kinematics of Rigid BodiesDocument54 pagesChapter Four Plane Kinematics of Rigid Bodiesyohannes lemiNo ratings yet
- Part 1 - Rev1Document55 pagesPart 1 - Rev1jk.fajardo4No ratings yet
- CH 16Document30 pagesCH 16Adeel AsgharNo ratings yet
- ProblemsDocument19 pagesProblemsManu SharmaNo ratings yet
- Kinematics of Machines Unit - Ii Velocity Analysis Absolute Velocity: Velocity of A Point With Respect To A Fixed Point (Zero Velocity Point)Document9 pagesKinematics of Machines Unit - Ii Velocity Analysis Absolute Velocity: Velocity of A Point With Respect To A Fixed Point (Zero Velocity Point)Jagadeesh Babu VadapalliNo ratings yet
- 2d Kinematics of RbodyDocument22 pages2d Kinematics of RbodyNurul AsyilahNo ratings yet
- Rotation, Rolling, Torque, and Angular Momentum: FI1101 Fisika Dasar IA (4 SKS) Semester I 2019/2020Document53 pagesRotation, Rolling, Torque, and Angular Momentum: FI1101 Fisika Dasar IA (4 SKS) Semester I 2019/2020Faisall SuciyantoNo ratings yet
- Rigid Body Dynamics: OutlineDocument6 pagesRigid Body Dynamics: OutlinenhNo ratings yet
- Planar Kinematics of A Rigid BodyDocument40 pagesPlanar Kinematics of A Rigid BodyZoker_45No ratings yet
- Chapter 16: Planar Kinematics of A Rigid Body: Dr. Humberto GarcíaDocument24 pagesChapter 16: Planar Kinematics of A Rigid Body: Dr. Humberto GarcíaHumbertoNo ratings yet
- Chapter 10 - Rotation and RollingDocument21 pagesChapter 10 - Rotation and RollingJatain KumarNo ratings yet
- Theory of Machines References 1 MechanicDocument25 pagesTheory of Machines References 1 MechanicMd. Zillur RahmanNo ratings yet
- Chap Er 16 ReviewDocument4 pagesChap Er 16 Reviewmhrdd222No ratings yet
- Phys101 Lectures 16, 17, 18: Rotational MotionDocument36 pagesPhys101 Lectures 16, 17, 18: Rotational MotionAldo Setyawan JayaNo ratings yet
- Lesson04 Slides v4Document33 pagesLesson04 Slides v4Ashley BillNo ratings yet
- KinematicsDocument33 pagesKinematicsNordin fatihahNo ratings yet
- ACFrOgDpem6234 ntKV5CGBYl6FJqV4IQA5An75NmdaJkeuC1yOEVkwax0N2 ZCP gL27XIMoWy0gIeHmCNRKogiLKuu15zbSnS4lMULMCzPBjZX3gUgAeH OIojoYgkyfPmIK 8bAClXW8cDWsBDocument2 pagesACFrOgDpem6234 ntKV5CGBYl6FJqV4IQA5An75NmdaJkeuC1yOEVkwax0N2 ZCP gL27XIMoWy0gIeHmCNRKogiLKuu15zbSnS4lMULMCzPBjZX3gUgAeH OIojoYgkyfPmIK 8bAClXW8cDWsBmalanga.bangaNo ratings yet
- Lect Position AnalysisDocument66 pagesLect Position AnalysisRayan IsranNo ratings yet
- Lect Position AnalysisDocument158 pagesLect Position AnalysisHassam Balouch100% (1)
- Relative Motion Dr. Hassan Ali: ENGD1106 Mechanical Principles-DynamicsDocument40 pagesRelative Motion Dr. Hassan Ali: ENGD1106 Mechanical Principles-DynamicsHalaaNo ratings yet
- MECH223 - Final LEcture No. 1 (Plane Motion of Rigid Bodies)Document20 pagesMECH223 - Final LEcture No. 1 (Plane Motion of Rigid Bodies)Ibo, Kim CaesarNo ratings yet
- Kinematics of Particles:: Space Curvilinear MotionDocument14 pagesKinematics of Particles:: Space Curvilinear MotionLady MendozaNo ratings yet
- Highway EngineeringDocument27 pagesHighway EngineeringCari RedNo ratings yet
- Automated Sand Gravity Sand Filter SystemDocument58 pagesAutomated Sand Gravity Sand Filter SystemMichaelNo ratings yet
- Transistor - Transistor Logic (TTL) : I LowDocument17 pagesTransistor - Transistor Logic (TTL) : I LowwisamNo ratings yet
- Manual of Microbiological Culture Media - 9Document1 pageManual of Microbiological Culture Media - 9Amin TaleghaniNo ratings yet
- My Kind Neighbour Simple Present Grammar Guides Reading Comprehension Exercises Tes - 74419Document1 pageMy Kind Neighbour Simple Present Grammar Guides Reading Comprehension Exercises Tes - 74419algarinejo100% (1)
- Krohne mfc300 Manual PDFDocument180 pagesKrohne mfc300 Manual PDFJorge GilNo ratings yet
- Quarter 1 Module 14 - Multiplication and Division of Fractions - November 20 and 21, 2020Document4 pagesQuarter 1 Module 14 - Multiplication and Division of Fractions - November 20 and 21, 2020MJ FabNo ratings yet
- Industry Implications For Global Supply ChainsDocument4 pagesIndustry Implications For Global Supply ChainsPhương Anh NguyễnNo ratings yet
- Brief Desccription of Ammonia Urea Plants With RevampDocument48 pagesBrief Desccription of Ammonia Urea Plants With RevampGeorge Van BommelNo ratings yet
- Bridge Final ProposalDocument14 pagesBridge Final ProposalDr. A B M Amrul KaishNo ratings yet
- Dinah HWDocument6 pagesDinah HWDinah AquinoNo ratings yet
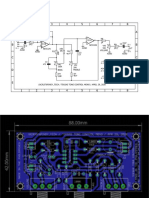
- Teksas Tone Control MonoDocument17 pagesTeksas Tone Control MonoRhenz TalhaNo ratings yet
- Flexi Multiradio 10 Base Station Transmission DescriptionDocument27 pagesFlexi Multiradio 10 Base Station Transmission DescriptionMohamedNasser Gad El MawlaNo ratings yet
- Courses To Study 13 X 2010Document96 pagesCourses To Study 13 X 2010hitmaaaccountNo ratings yet
- CTR201Document2 pagesCTR201Vicente RezabalaNo ratings yet
- Dr. BM RAO - Nitrosamine Impurities and NDSRIs UpdatesDocument5 pagesDr. BM RAO - Nitrosamine Impurities and NDSRIs UpdatesVinay PatelNo ratings yet
- Potential Targets For Antifungal Drug Discovery - Creative Biolabs - 1619624328334Document6 pagesPotential Targets For Antifungal Drug Discovery - Creative Biolabs - 1619624328334DicksonNo ratings yet
- Industry X.0: Realizing Digital Value in Industrial SectorsDocument15 pagesIndustry X.0: Realizing Digital Value in Industrial SectorsJamey DAVIDSONNo ratings yet
- Attachment - Statement HP 2023 January Cyan, Magenta, Yellow, and BlackDocument2 pagesAttachment - Statement HP 2023 January Cyan, Magenta, Yellow, and BlackWayan PartaNo ratings yet
- Bei PDFDocument1 pageBei PDFartresurrected23No ratings yet
- Proposed 2-Storey Residence: 710 Burgos St. Paliwas, Obando Bulacan Owner: Mr. & Mrs. Pascualito SantiagoDocument14 pagesProposed 2-Storey Residence: 710 Burgos St. Paliwas, Obando Bulacan Owner: Mr. & Mrs. Pascualito SantiagoAlfie Angelo ReyesNo ratings yet
- Electronic Prepayment Meter6Document4 pagesElectronic Prepayment Meter6Sumitha SudevanNo ratings yet
- Catalogo ComarDocument68 pagesCatalogo ComaralbertoNo ratings yet
- Korn Walker BlockDocument2 pagesKorn Walker BlockadamsliversNo ratings yet