You might also like
- Line Following Robot ResearchDocument4 pagesLine Following Robot ResearchtherealslimNo ratings yet
- Design of A PID Optimized Neural Networks and PD Fuzzy Logic Controllers For A Two-Wheeled Mobile RobotDocument19 pagesDesign of A PID Optimized Neural Networks and PD Fuzzy Logic Controllers For A Two-Wheeled Mobile Robotyazen H ShakirNo ratings yet
- Design and Development of An Educational Desktop Robot R DDocument8 pagesDesign and Development of An Educational Desktop Robot R DHaile SimachewNo ratings yet
- Robust Navigational Control of a Two-Wheeled Self-Balancing Robot Using PD-PI ControllerDocument12 pagesRobust Navigational Control of a Two-Wheeled Self-Balancing Robot Using PD-PI ControllerVickey VigneshNo ratings yet
- Encoder-Free Odometric System For Autonomous MicrorobotsDocument11 pagesEncoder-Free Odometric System For Autonomous MicrorobotsSergeNo ratings yet
- Energy Comparison of Controllers Used For A Differential Drive Wheeled Mobile RobotDocument13 pagesEnergy Comparison of Controllers Used For A Differential Drive Wheeled Mobile RobotElias GarcíaNo ratings yet
- Model-Based Sensorless Robot Collisiondetection Under Model Uncertaintieswith A Fast Dynamics IdentificationDocument15 pagesModel-Based Sensorless Robot Collisiondetection Under Model Uncertaintieswith A Fast Dynamics IdentificationPiyumal SamarathungaNo ratings yet
- Design and Control of A Multiple-Section Continuum Robot With A Hybrid Sensing SystemDocument13 pagesDesign and Control of A Multiple-Section Continuum Robot With A Hybrid Sensing SystemDjedili AmelNo ratings yet
- Design and Implementation of FPGA-Based Robotic Arm ManipulatorDocument6 pagesDesign and Implementation of FPGA-Based Robotic Arm ManipulatorGraef Engenharia Projetos e AssessoriaNo ratings yet
- A Fuzzy Rule-Based Control System For Fast Line-Following RobotsDocument8 pagesA Fuzzy Rule-Based Control System For Fast Line-Following RobotsJithosh BabuNo ratings yet
- Optimization of PID Control For High Speed Line Tracking RobotsDocument8 pagesOptimization of PID Control For High Speed Line Tracking RobotsPiero RaurauNo ratings yet
- Articulated Robotic ArmDocument9 pagesArticulated Robotic ArmAkshat MishraNo ratings yet
- Modeling and Designing of Gesture Control Robot: October 2017Document7 pagesModeling and Designing of Gesture Control Robot: October 2017Raka SinhaNo ratings yet
- Design and Simulation of DC Motor Speed Controller Using Pole Placement Technique and MATLABDocument9 pagesDesign and Simulation of DC Motor Speed Controller Using Pole Placement Technique and MATLAB2K18/EE/244 VIPESH DUNKWALNo ratings yet
- Robot Final ReportDocument14 pagesRobot Final ReportHaiderNo ratings yet
- Fabricating A Completely Assemblable Robotic ArmDocument19 pagesFabricating A Completely Assemblable Robotic ArmshanthiniNo ratings yet
- PID Controlled Indoor Line Tracking Robot DesignDocument5 pagesPID Controlled Indoor Line Tracking Robot DesignThảo Dương Thị MinhNo ratings yet
- Zainaib JasssimDocument9 pagesZainaib JasssimAs AdNo ratings yet
- Robots - Sensores - ProgramaciónDocument23 pagesRobots - Sensores - ProgramaciónEliasNo ratings yet
- A Pneumatic Conveyor Robot For Color Detection and SortingDocument13 pagesA Pneumatic Conveyor Robot For Color Detection and SortingAhmad FyzarmanNo ratings yet
- Warehouse Management BOT Using ArduinoDocument6 pagesWarehouse Management BOT Using ArduinoIJRASETPublicationsNo ratings yet
- Fuzzy Logic of Speed and Steering Control System For Three Dimensional Line Following of An Autonomous VehicleDocument8 pagesFuzzy Logic of Speed and Steering Control System For Three Dimensional Line Following of An Autonomous Vehiclealeena_bcNo ratings yet
- Design and Fabrication of 3-DOF Robot Arm Using Parallelogram MechanismsDocument6 pagesDesign and Fabrication of 3-DOF Robot Arm Using Parallelogram MechanismsWARSE JournalsNo ratings yet
- Wireless Robotic Arm Motion ControlDocument6 pagesWireless Robotic Arm Motion ControlMuhammad AdnanNo ratings yet
- Expert Systems With Applications: Hamit ErdemDocument9 pagesExpert Systems With Applications: Hamit ErdemFelix CuevasNo ratings yet
- Model-Assisted Extended State Observer-Based CompuDocument12 pagesModel-Assisted Extended State Observer-Based CompumezianeNo ratings yet
- Control techniques for robotic manipulatorsDocument4 pagesControl techniques for robotic manipulatorsManar HosnyNo ratings yet
- RFID-Based Mobile Robot Positioning - Sensors and TechniquesDocument5 pagesRFID-Based Mobile Robot Positioning - Sensors and Techniquessurendiran123No ratings yet
- COPPELIASIMDocument7 pagesCOPPELIASIMRooban SNo ratings yet
- JETIRFA06001Document5 pagesJETIRFA06001Trần ĐạtNo ratings yet
- An Online Real-Time Path Compensation System For Industrial Robots Based On Laser TrackerDocument14 pagesAn Online Real-Time Path Compensation System For Industrial Robots Based On Laser TrackerMihail AvramovNo ratings yet
- 2019 KSJ IJAMT v101 pp243-259Document17 pages2019 KSJ IJAMT v101 pp243-259Viktor SokolovNo ratings yet
- IJRPR24894Document6 pagesIJRPR24894kesebas6exNo ratings yet
- Online Control of DC Motors Using Fuzzy Logic for Remote RobotsDocument11 pagesOnline Control of DC Motors Using Fuzzy Logic for Remote RobotsHafidh Eki FauziNo ratings yet
- Design and Development of A Low Cost RescueDocument5 pagesDesign and Development of A Low Cost RescueNazmul Shikder RiyadhNo ratings yet
- Project Title...Document7 pagesProject Title...Abhishek ShahNo ratings yet
- Automatic Pick and Place Robotic Arm Vehicle: IjarcceDocument3 pagesAutomatic Pick and Place Robotic Arm Vehicle: Ijarccebendali nadirNo ratings yet
- Mobile Robot System Architecture For People Tracking and Following ApplicationsDocument6 pagesMobile Robot System Architecture For People Tracking and Following ApplicationsSergio David Sierra MarinNo ratings yet
- Sensors: Recycling and Updating An Educational Robot Manipulator With Open-Hardware-ArchitectureDocument22 pagesSensors: Recycling and Updating An Educational Robot Manipulator With Open-Hardware-ArchitectureNelson Camilo de AlmeidaNo ratings yet
- Pick and Place Arm Movement Control by AndroidDocument61 pagesPick and Place Arm Movement Control by Androidnagaraju75% (4)
- Advance Line Following Robot: Shivam Singh, Prashant KumarDocument3 pagesAdvance Line Following Robot: Shivam Singh, Prashant Kumaranil kasot100% (1)
- Wireless Robot Control With Robotic Arm Using Mems and ZigbeeDocument5 pagesWireless Robot Control With Robotic Arm Using Mems and ZigbeeCh RamanaNo ratings yet
- Kinematic Analysis of Open-Source 5 DoF Robot Arm (#843139) - 1456378Document10 pagesKinematic Analysis of Open-Source 5 DoF Robot Arm (#843139) - 1456378Mohammad GamalNo ratings yet
- 1 PBDocument7 pages1 PBFyndi Aw AwNo ratings yet
- Sun 2020Document13 pagesSun 2020ShivamPathakNo ratings yet
- Robot Optimum DesignDocument13 pagesRobot Optimum DesignNarayan ManeNo ratings yet
- Bet'S Basavakalyan Engineering College BASAVAKALYAN-585327: "RF Controlled Multi-Terrain Robot"Document20 pagesBet'S Basavakalyan Engineering College BASAVAKALYAN-585327: "RF Controlled Multi-Terrain Robot"Abhay BhujNo ratings yet
- Continuum RobotDocument42 pagesContinuum Robotxs.a.ma.nt.halop.e.zNo ratings yet
- An InPipe Inspection Robot With Permanent Magnets and Omnidirectional Wheels Design and ImplementationApplied Sciences SwitzerlandDocument14 pagesAn InPipe Inspection Robot With Permanent Magnets and Omnidirectional Wheels Design and ImplementationApplied Sciences Switzerlandoduimmanuel21No ratings yet
- Matchava Rajalakshmi RaviDocument6 pagesMatchava Rajalakshmi Raviravishankar yadavNo ratings yet
- IJRA TemplateDocument9 pagesIJRA TemplateLuis VelascoNo ratings yet
- Dynamic Path Tracking of Industrial RobotsDocument12 pagesDynamic Path Tracking of Industrial RobotsConway MartinezNo ratings yet
- Gheorghe - ICAE Design and Implementation of Membrane Controllers For Trajectory Tracking of Nonholonomic Wheeled Mobile RobotsDocument18 pagesGheorghe - ICAE Design and Implementation of Membrane Controllers For Trajectory Tracking of Nonholonomic Wheeled Mobile Robotsmont21No ratings yet
- Ijre 5 028Document17 pagesIjre 5 028Hanan ShayiboNo ratings yet
- Robotic Arm Dynamic and Simulation With Virtual Re PDFDocument7 pagesRobotic Arm Dynamic and Simulation With Virtual Re PDFALA SOUISSINo ratings yet
- RoboticsDocument32 pagesRoboticsNimmagaddadeepakNo ratings yet
- 1 s2.0 S0094114X2200163X MainDocument31 pages1 s2.0 S0094114X2200163X Mainkurts010No ratings yet
- Distributed Autonomous Robotic Systems For Co Operative Control IJERTCONV6IS13172Document6 pagesDistributed Autonomous Robotic Systems For Co Operative Control IJERTCONV6IS13172tekato kikutaNo ratings yet
- Industrial Robotic Arm Report SummaryDocument19 pagesIndustrial Robotic Arm Report SummaryKshitij BandarNo ratings yet
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- DPA51 3-Phase Relay Monitors Sequence & Phase LossDocument3 pagesDPA51 3-Phase Relay Monitors Sequence & Phase Losssandesh sawateNo ratings yet
- Cambridge A-Level Business - CHP 27Document15 pagesCambridge A-Level Business - CHP 27SitayeshNo ratings yet
- Crocodile DIY Paper CraftDocument16 pagesCrocodile DIY Paper CraftAlireza Emami100% (1)
- Pre Monsoon ChecklistDocument3 pagesPre Monsoon ChecklistMd jawed83% (6)
- Idcg02 02GBDocument304 pagesIdcg02 02GBAlexander VazquezNo ratings yet
- Marketing Management FunctionDocument3 pagesMarketing Management FunctionRexchel TuazonNo ratings yet
- Mir100-Datasheet (2) 1Document2 pagesMir100-Datasheet (2) 1S NguyenNo ratings yet
- Second Semester - Final Exam - Google FormsDocument11 pagesSecond Semester - Final Exam - Google FormsAriel LumactodNo ratings yet
- FortiWeb 6.3.14 Release NotesDocument19 pagesFortiWeb 6.3.14 Release Notesumbo202No ratings yet
- Explosion Vent Panels UkDocument3 pagesExplosion Vent Panels UkIgur EuiNo ratings yet
- Module 4.2 TD 8 WEEK5Document7 pagesModule 4.2 TD 8 WEEK5meraaguilanNo ratings yet
- Precision Locators - Optimized Precision For Your UtilityDocument12 pagesPrecision Locators - Optimized Precision For Your UtilityZhanclove NajwaNo ratings yet
- SAE To Metric Conversion ChartDocument5 pagesSAE To Metric Conversion ChartLAliNo ratings yet
- G3-160T DataSheet 245Document2 pagesG3-160T DataSheet 245Henry Esteban MesiasNo ratings yet
- Apple INC Develop Symbiosis Relationship With The Stakeholders by Satisfying Most of Its StakeholdersDocument6 pagesApple INC Develop Symbiosis Relationship With The Stakeholders by Satisfying Most of Its StakeholdersGlazejane BanawanNo ratings yet
- 3214 Ed 01Document28 pages3214 Ed 01Popa Gabriel0% (1)
- Quantity Item by Warehouse List: PT Solusi Teknik IndustriDocument6 pagesQuantity Item by Warehouse List: PT Solusi Teknik IndustriShinyeNo ratings yet
- Logcat 1655985586793Document22 pagesLogcat 1655985586793Alex ANo ratings yet
- Terex RT 665 Tabla de CapacidadDocument8 pagesTerex RT 665 Tabla de CapacidadFabian AyalaNo ratings yet
- 2929 Bondply Multi-Layer Board Processing GuidelinesDocument4 pages2929 Bondply Multi-Layer Board Processing GuidelinesEduardo Ruiz PalominoNo ratings yet
- DH WorkshopDocument17 pagesDH Workshopaan monNo ratings yet
- Hydraulic OilDocument1 pageHydraulic OilNadeem AhmedNo ratings yet
- Cisco IOS Security Command Reference - Commands A To CDocument1,000 pagesCisco IOS Security Command Reference - Commands A To CsilverclericNo ratings yet
- Part 3 Simulation With RDocument42 pagesPart 3 Simulation With RNguyễn OanhNo ratings yet
- PythonDocument5 pagesPythonSebastian HernandezNo ratings yet
- Public Speaking-RevolveDocument11 pagesPublic Speaking-RevolveRoshadé's TvNo ratings yet
- TACO - Free On Demand TrainingDocument18 pagesTACO - Free On Demand TrainingVinicius Paschoal NatalicioNo ratings yet
- HoW To Dispose Outdated ElectronicsDocument10 pagesHoW To Dispose Outdated ElectronicsNoel JosephNo ratings yet
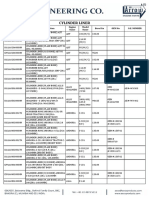
- Cylinder Liner: Item Code Item Description Engine Name Model Name Bore Dia Oem No O.E. NumberDocument49 pagesCylinder Liner: Item Code Item Description Engine Name Model Name Bore Dia Oem No O.E. NumberDuvacy0% (1)
- ZOOMLION Long Reach ExcavatorDocument1 pageZOOMLION Long Reach Excavatormohammed soaibul haque chowdhuryNo ratings yet