You might also like
- Practical, Made Easy Guide To Robotics & Automation [Revised Edition]From EverandPractical, Made Easy Guide To Robotics & Automation [Revised Edition]Rating: 1 out of 5 stars1/5 (1)
- CobotpreprintYC RM SSMFSourceR225 11 2020Document36 pagesCobotpreprintYC RM SSMFSourceR225 11 2020Raner FergusonNo ratings yet
- Paper 02 CoBot Intro and SpecsDocument12 pagesPaper 02 CoBot Intro and SpecsJiggaNo ratings yet
- Implementation of Digital Twin For Three CNC Machines Consisting of Loading and Unloading Operations Using A CobotDocument6 pagesImplementation of Digital Twin For Three CNC Machines Consisting of Loading and Unloading Operations Using A CobotInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- MachinesDocument28 pagesMachinesMichieru5No ratings yet
- Preparation of Collaborative Robot Implementation in The Czech RepublicDocument8 pagesPreparation of Collaborative Robot Implementation in The Czech RepublicHuman Resources DepartmentNo ratings yet
- Ros Integrated Api2Document7 pagesRos Integrated Api2Samuel Garcia CerdaNo ratings yet
- A Review Paper On Google Assistance Based Consumer Vacuum Suction Dusting RobotDocument6 pagesA Review Paper On Google Assistance Based Consumer Vacuum Suction Dusting RobotIJRASETPublicationsNo ratings yet
- Human-Robot Collaboration in Manufacturing Applications - A ReviewDocument25 pagesHuman-Robot Collaboration in Manufacturing Applications - A ReviewPiyumal SamarathungaNo ratings yet
- Best Ref PaperDocument25 pagesBest Ref PaperKanna MonishNo ratings yet
- Distributed Robotics A PrimerDocument6 pagesDistributed Robotics A PrimerEditor IJTSRDNo ratings yet
- PARVUS - Miniaturised Robot For Improved Flexibility in Micro ProductionDocument9 pagesPARVUS - Miniaturised Robot For Improved Flexibility in Micro ProductionMohd Radzi TarmiziNo ratings yet
- Eng 05 00029Document12 pagesEng 05 00029Brijesh PatelNo ratings yet
- RIA Collaborative Robots White Paper October 2014Document13 pagesRIA Collaborative Robots White Paper October 2014solomonlazioNo ratings yet
- Modeling and Design of A Humanoid Robot by AdditivDocument8 pagesModeling and Design of A Humanoid Robot by AdditivChristopher UzomaNo ratings yet
- The Concept of Autonomous Systems in Industry 4.0: Advanced Logistic Systems April 2019Document12 pagesThe Concept of Autonomous Systems in Industry 4.0: Advanced Logistic Systems April 2019Alin VulcanNo ratings yet
- Nist Ir 8022 PDFDocument21 pagesNist Ir 8022 PDFmarwenNo ratings yet
- Uses of Cobotique in IndustryDocument3 pagesUses of Cobotique in IndustryHerdal NanvouNo ratings yet
- Collaborative Robots Industry Group 1Document13 pagesCollaborative Robots Industry Group 1SoorajKrishnanNo ratings yet
- Robotics and Computer Integrated ManufacturingDocument9 pagesRobotics and Computer Integrated ManufacturingÚrsula RuizNo ratings yet
- Robotics For BusinessDocument7 pagesRobotics For BusinessEditor IJTSRDNo ratings yet
- Voice Controlled RobotDocument7 pagesVoice Controlled RobotIJRASETPublicationsNo ratings yet
- Industrial RoboticsDocument25 pagesIndustrial RoboticsRajat NishadNo ratings yet
- I Eee Access Journal 3035729Document43 pagesI Eee Access Journal 3035729lekhanas.20.bemtNo ratings yet
- AOTAI NEWSLETTER, Cobot Solution PDFDocument11 pagesAOTAI NEWSLETTER, Cobot Solution PDFVăn Phương NguyễnNo ratings yet
- Paper 01 CoBot Intro and SpecsDocument9 pagesPaper 01 CoBot Intro and SpecsJiggaNo ratings yet
- Collaborative Vs Industrial RobotDocument5 pagesCollaborative Vs Industrial RobotHartadi KurniaNo ratings yet
- Research PaperDocument11 pagesResearch PaperIshan BhargaveNo ratings yet
- Collaborative Robots: Frontiers of Current Literature: ArticleDocument9 pagesCollaborative Robots: Frontiers of Current Literature: ArticleJessica NovitaNo ratings yet
- Cobot Programming For Collaborative Industrial Tasks: An OverviewDocument37 pagesCobot Programming For Collaborative Industrial Tasks: An OverviewSayantan RahaNo ratings yet
- Supporting Tools For Operator in Robot Collaborative Mode: SciencedirectDocument8 pagesSupporting Tools For Operator in Robot Collaborative Mode: SciencedirectdenyNo ratings yet
- PickingDK A Framework For Industrial Bin-Picking ADocument18 pagesPickingDK A Framework For Industrial Bin-Picking AROBOTLAB ChannelNo ratings yet
- Applicationof Roboticsinthe Indian IndustryDocument5 pagesApplicationof Roboticsinthe Indian IndustryRaner FergusonNo ratings yet
- Jurnal 2023 - A Review On Automation and Robotic Technology in Construction IndustryDocument5 pagesJurnal 2023 - A Review On Automation and Robotic Technology in Construction IndustryyulfaNo ratings yet
- COBOT Applications - Recent Advances and ChallengesDocument33 pagesCOBOT Applications - Recent Advances and ChallengesPiyumal SamarathungaNo ratings yet
- Iot and Cloud Computing in Automation of Assembly Modeling SystemsDocument10 pagesIot and Cloud Computing in Automation of Assembly Modeling SystemsVikasThadaNo ratings yet
- Prolisean First Security Protocol For Programmable MatterDocument29 pagesProlisean First Security Protocol For Programmable MatterEdy HouranyNo ratings yet
- Ketab Otomasion Sanati Mazaia V Karbord An Dar Sistem Ha - (WWW - Wikipower.ir)Document560 pagesKetab Otomasion Sanati Mazaia V Karbord An Dar Sistem Ha - (WWW - Wikipower.ir)hrme80No ratings yet
- The New Era of Robotics: Devices and Systems: December 2018Document6 pagesThe New Era of Robotics: Devices and Systems: December 2018SvastitsNo ratings yet
- PDF 20221014 160103 0000Document16 pagesPDF 20221014 160103 0000Prateek SrivastavaNo ratings yet
- Comparative Study of Human PoseDocument9 pagesComparative Study of Human PoseEswariah VannamNo ratings yet
- A Comprehensive Survey of The Internet of Things Open Source Operating SystemsDocument18 pagesA Comprehensive Survey of The Internet of Things Open Source Operating SystemsLiNuNo ratings yet
- SmartManufacturing JMS 2020 PreprintDocument40 pagesSmartManufacturing JMS 2020 Preprintnnamanianthony3No ratings yet
- 2013IGIGlobal RoboticGrippersGraspingandGraspPlanningDocument33 pages2013IGIGlobal RoboticGrippersGraspingandGraspPlanningNavy FanasticNo ratings yet
- Gualtieri Et Al. Applied Erg. 2022Document15 pagesGualtieri Et Al. Applied Erg. 2022conicet.ibymeNo ratings yet
- Industrial RobotsDocument32 pagesIndustrial Robotsclaudiu feier50% (2)
- Human - Robot Collaboration in Industry: MM Science Journal June 2016Document5 pagesHuman - Robot Collaboration in Industry: MM Science Journal June 2016Kanna MonishNo ratings yet
- A New Mass Customization Platform Hyperledger CompDocument7 pagesA New Mass Customization Platform Hyperledger CompRehan HanifNo ratings yet
- Soft Robotics An OverviewDocument7 pagesSoft Robotics An OverviewEditor IJTSRDNo ratings yet
- IoT Based Floor Cleaning RobotDocument6 pagesIoT Based Floor Cleaning RobotIJRASETPublicationsNo ratings yet
- Final ThesisDocument30 pagesFinal ThesisNandha KumarNo ratings yet
- Futureinternet 14 00109Document25 pagesFutureinternet 14 00109Manuel ortiz camachoNo ratings yet
- Literature Review For Industrial RobotsDocument6 pagesLiterature Review For Industrial Robotsea7y3197100% (1)
- Machine Learning in RoboticsDocument5 pagesMachine Learning in RoboticsEditor IJTSRDNo ratings yet
- Internet of Spatial Things: A New Reference Model With Insight AnalysisDocument18 pagesInternet of Spatial Things: A New Reference Model With Insight AnalysisSuchismita SahuNo ratings yet
- Worker'S Assistant Robot Using Myrio and Labview: April 2019Document6 pagesWorker'S Assistant Robot Using Myrio and Labview: April 2019chuyen truongNo ratings yet
- Automatic Domestic Vaccum CleanerDocument5 pagesAutomatic Domestic Vaccum CleanerIJRASETPublicationsNo ratings yet
- Paper Cobot 1Document8 pagesPaper Cobot 1Jessica NovitaNo ratings yet
- Safeguarding and Supporting Future RobotDocument8 pagesSafeguarding and Supporting Future RobotDokajanNo ratings yet
- 2178 5270 2 PBDocument10 pages2178 5270 2 PBAngeline LaresmaNo ratings yet
- 03 - COLLOBRATIVE ROBOT FOR INDUSTRIAL APPLICATION - ProcessingFeeDocument1 page03 - COLLOBRATIVE ROBOT FOR INDUSTRIAL APPLICATION - ProcessingFeeNIKHIL ASNo ratings yet
- Automative Electronics and Hybrid VehicleDocument34 pagesAutomative Electronics and Hybrid VehicleNIKHIL ASNo ratings yet
- PreviewpdfDocument49 pagesPreviewpdfNIKHIL ASNo ratings yet
- KSCT Project ProposalDocument7 pagesKSCT Project ProposalNIKHIL ASNo ratings yet
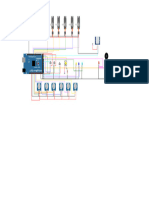
- Final - Project - Wokwi ESP32, STM32, Arduino Simulator-2Document1 pageFinal - Project - Wokwi ESP32, STM32, Arduino Simulator-2NIKHIL ASNo ratings yet
- 18MT72 Jan Feb 2023Document3 pages18MT72 Jan Feb 2023NIKHIL ASNo ratings yet
- FRA2020b DesigninginterconnectedhapticinterfacesDocument22 pagesFRA2020b DesigninginterconnectedhapticinterfacesNIKHIL ASNo ratings yet
- WNC Certificate of Seminar ReportDocument13 pagesWNC Certificate of Seminar ReportNIKHIL ASNo ratings yet
- IV-II PLC Lab ManualDocument46 pagesIV-II PLC Lab ManualNIKHIL ASNo ratings yet
- How To Submit Interest in Skill HubDocument2 pagesHow To Submit Interest in Skill HubNIKHIL AS100% (1)
- Lecture 19Document3 pagesLecture 19NIKHIL ASNo ratings yet
- Brief Note On Student PassDocument2 pagesBrief Note On Student PassSneha Sneha dollyNo ratings yet
- Power Electronics VivaDocument7 pagesPower Electronics VivaAbhay Shankar Bharadwaj100% (1)
- Ni Lab PrintsDocument23 pagesNi Lab PrintsNIKHIL ASNo ratings yet
- 2.industrial ElectronicsDocument12 pages2.industrial ElectronicsNIKHIL ASNo ratings yet
- Department of Technical EducationDocument10 pagesDepartment of Technical EducationNIKHIL ASNo ratings yet
- 5.industrial Electronics and DAS LabDocument5 pages5.industrial Electronics and DAS LabNIKHIL ASNo ratings yet
- 7.project work-II On Design of Mechatronics System and Industrial VisitsDocument7 pages7.project work-II On Design of Mechatronics System and Industrial VisitsNIKHIL ASNo ratings yet
- 6.CAD LabDocument5 pages6.CAD LabNIKHIL ASNo ratings yet
- 6.in Plant TrainingDocument5 pages6.in Plant TrainingNIKHIL ASNo ratings yet
- 7.microcontroller and Interfacing LabDocument7 pages7.microcontroller and Interfacing LabNIKHIL ASNo ratings yet
- 5.python-Programming LabDocument7 pages5.python-Programming LabNIKHIL ASNo ratings yet
- How To PayDocument3 pagesHow To PayNIKHIL ASNo ratings yet
- 4.CNC and Robotics LabDocument5 pages4.CNC and Robotics LabNIKHIL ASNo ratings yet
- 3 (B) .Automotive Electronics (Elective)Document10 pages3 (B) .Automotive Electronics (Elective)NIKHIL ASNo ratings yet
- 3 (A) - Medical Electronics (Elective)Document11 pages3 (A) - Medical Electronics (Elective)NIKHIL ASNo ratings yet
- MST PPT1Document18 pagesMST PPT1NIKHIL ASNo ratings yet
- Python Lab PrintsDocument9 pagesPython Lab PrintsNIKHIL ASNo ratings yet
- DEPARTMENT OF MECHATRONICS ENGINEERING EditedDocument11 pagesDEPARTMENT OF MECHATRONICS ENGINEERING EditedNIKHIL ASNo ratings yet
- Module-4 - Balancing of Rotating MassesDocument46 pagesModule-4 - Balancing of Rotating MassesNIKHIL ASNo ratings yet
- AI 101 Whitepaper CobbleStone SoftwareDocument9 pagesAI 101 Whitepaper CobbleStone SoftwareSaad Yacoubi SahliNo ratings yet
- GE Tonoport V Blood Pressure Monitor - Service ManualDocument52 pagesGE Tonoport V Blood Pressure Monitor - Service ManualManuel SaenzNo ratings yet
- Java Advantages Over C++Document3 pagesJava Advantages Over C++sures_89No ratings yet
- AZ 900 Questions - Part1to13Document70 pagesAZ 900 Questions - Part1to13Nguyen Tuan Anh100% (1)
- DatasheetDocument127 pagesDatasheetkiet nguyen trucNo ratings yet
- ADD DeletePlaceAPIsDocument4 pagesADD DeletePlaceAPIsRahul GehlotNo ratings yet
- Xam Idea Maths Solutions Class 10 Chapter 2 PolynomialsDocument25 pagesXam Idea Maths Solutions Class 10 Chapter 2 Polynomialsexam ascent100% (1)
- Acpi Enumeration Rev0 5 PDFDocument13 pagesAcpi Enumeration Rev0 5 PDFluluioNo ratings yet
- Continue: Belt Conveyor Mini Project Report PDFDocument2 pagesContinue: Belt Conveyor Mini Project Report PDFRavi PanditNo ratings yet
- The Ultimate Outbound Sales CadenceDocument1 pageThe Ultimate Outbound Sales CadencertrwtNo ratings yet
- DBMSDocument11 pagesDBMSOperation ResearchNo ratings yet
- Ethical and Social Issues in Information SystemsDocument16 pagesEthical and Social Issues in Information SystemsArbab AshrafNo ratings yet
- M BusDocument91 pagesM BusZoran MilicNo ratings yet
- Cloud Strategy Document TemplateDocument19 pagesCloud Strategy Document TemplatekilldrezNo ratings yet
- Federated Learning ArticleDocument68 pagesFederated Learning Articlesunk86No ratings yet
- Lighting Plan L7Document1 pageLighting Plan L7Dani WaskitoNo ratings yet
- Python Collections ModuleDocument19 pagesPython Collections Moduleyaar1220No ratings yet
- Ata 31 A320Document3,527 pagesAta 31 A320Santiago Cordero AyalaNo ratings yet
- Questioner/Reviewer For Actual Examination in Microsoft Word 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. Ms Word? 11. 12. 13. 14. Usb? 15. 16. 17. 18. 19Document2 pagesQuestioner/Reviewer For Actual Examination in Microsoft Word 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. Ms Word? 11. 12. 13. 14. Usb? 15. 16. 17. 18. 19shanecelladoraNo ratings yet
- Supervised Vs Unsupervised ClassificationDocument2 pagesSupervised Vs Unsupervised ClassificationMario UltimateAddiction HyltonNo ratings yet
- GP5124-07276-Datasheet R1 2Document4 pagesGP5124-07276-Datasheet R1 2Ahmed TimrazNo ratings yet
- Docu58234 PDFDocument14 pagesDocu58234 PDFlongvietmtNo ratings yet
- Cmip9c82w 28sd 4g SpecDocument5 pagesCmip9c82w 28sd 4g SpecOscar QuiñonezNo ratings yet
- Setting Up SITL On Windows - Dev DocumentationDocument13 pagesSetting Up SITL On Windows - Dev Documentationsfsdf ısıoefıoqNo ratings yet
- Resume For Travel AgentDocument8 pagesResume For Travel Agentafmrnroadofebl100% (1)
- CV Dr. Madiha KhalidDocument3 pagesCV Dr. Madiha Khalidshyaan999No ratings yet
- Set B and C Text With Work BookDocument146 pagesSet B and C Text With Work BookPhyo ThutaNo ratings yet
- Group 5 Detailed-Level-Dimensional-Modeling-Workbook-Group5Document48 pagesGroup 5 Detailed-Level-Dimensional-Modeling-Workbook-Group5Hai Do VietNo ratings yet
- Online Clearance SystemDocument7 pagesOnline Clearance Systempearl descuatan56% (9)
- Lesson 8 (10) - Media ConvergenceDocument1 pageLesson 8 (10) - Media ConvergenceRonhielyn AlbisNo ratings yet
- A Welder’s Handbook to Robotic ProgrammingFrom EverandA Welder’s Handbook to Robotic ProgrammingRating: 5 out of 5 stars5/5 (3)
- Dark Aeon: Transhumanism and the War Against HumanityFrom EverandDark Aeon: Transhumanism and the War Against HumanityRating: 5 out of 5 stars5/5 (1)
- Artificial Intelligence: From Medieval Robots to Neural NetworksFrom EverandArtificial Intelligence: From Medieval Robots to Neural NetworksRating: 4 out of 5 stars4/5 (3)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!From EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Rating: 4 out of 5 stars4/5 (3)
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureFrom EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureRating: 4.5 out of 5 stars4.5/5 (2)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (5)
- Evil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityFrom EverandEvil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityRating: 4.5 out of 5 stars4.5/5 (3)
- Mastering Drones - A Beginner's Guide To Start Making Money With DronesFrom EverandMastering Drones - A Beginner's Guide To Start Making Money With DronesRating: 2.5 out of 5 stars2.5/5 (3)
- In the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkFrom EverandIn the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkRating: 5 out of 5 stars5/5 (1)
- Comprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessFrom EverandComprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessNo ratings yet
- Artificial You: AI and the Future of Your MindFrom EverandArtificial You: AI and the Future of Your MindRating: 4 out of 5 stars4/5 (3)
- How to Survive a Robot Uprising: Tips on Defending Yourself Against the Coming RebellionFrom EverandHow to Survive a Robot Uprising: Tips on Defending Yourself Against the Coming RebellionRating: 3.5 out of 5 stars3.5/5 (129)
- Arduino: The ultimate Arduino guide for beginners, including Arduino programming, Arduino cookbook, tips, tricks, and more!From EverandArduino: The ultimate Arduino guide for beginners, including Arduino programming, Arduino cookbook, tips, tricks, and more!Rating: 3 out of 5 stars3/5 (1)
- Atlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceFrom EverandAtlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceRating: 5 out of 5 stars5/5 (9)
- ChatGPT: The Future of Intelligent ConversationFrom EverandChatGPT: The Future of Intelligent ConversationRating: 3.5 out of 5 stars3.5/5 (8)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- Create Profitable Side Hustles with Artificial IntelligenceFrom EverandCreate Profitable Side Hustles with Artificial IntelligenceNo ratings yet
- What to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationFrom EverandWhat to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationRating: 4.5 out of 5 stars4.5/5 (2)
- Collection of Raspberry Pi ProjectsFrom EverandCollection of Raspberry Pi ProjectsRating: 5 out of 5 stars5/5 (1)
![Practical, Made Easy Guide To Robotics & Automation [Revised Edition]](https://imgv2-1-f.scribdassets.com/img/word_document/253466853/149x198/4281882d40/1709916831?v=1)