You might also like
- Industrial Robotics (Unit 1 & 2)Document76 pagesIndustrial Robotics (Unit 1 & 2)b_meenakshipriya100% (2)
- Space Robotics: Seminar OnDocument30 pagesSpace Robotics: Seminar OnDhanish DhanishNo ratings yet
- Scara RobotDocument17 pagesScara RobotLalit Kushwaha100% (1)
- Space Robotics: Presented by Abc IV-Btech Mechnical EngineeringDocument36 pagesSpace Robotics: Presented by Abc IV-Btech Mechnical EngineeringVinayak PaneriNo ratings yet
- Robots 447Document36 pagesRobots 447manishtopsecretsNo ratings yet
- RoboticsDocument107 pagesRoboticsNalaiza ToribioNo ratings yet
- Ie 450 PP 8Document37 pagesIe 450 PP 8vijayasarathy2013No ratings yet
- 2-Brief History, Types of Robots, Degrees of Freedom of Robots, Robot configurations-13-Jul-2020Material - I - 13-Jul-2020 - IntroductionDocument62 pages2-Brief History, Types of Robots, Degrees of Freedom of Robots, Robot configurations-13-Jul-2020Material - I - 13-Jul-2020 - IntroductionSPARSH RAJNo ratings yet
- Basics of Robotics 24.06.2020Document25 pagesBasics of Robotics 24.06.2020prabhaNo ratings yet
- Introduction To RoboticsDocument60 pagesIntroduction To RoboticsJOEL STEPHEN 19BEE0262No ratings yet
- ROBOTICS Part4Document94 pagesROBOTICS Part4Sandeep GogadiNo ratings yet
- ROBOTICSDocument107 pagesROBOTICSReynald John PastranaNo ratings yet
- Introduction To RoboticsDocument35 pagesIntroduction To Roboticsرهف عبد اللهNo ratings yet
- RoboticsDocument60 pagesRoboticsKasun AnjanaNo ratings yet
- Introduction To Concepts in RoboticsDocument26 pagesIntroduction To Concepts in RoboticsزهديابوانسNo ratings yet
- Lecture 2 - Components and SubsystemsDocument43 pagesLecture 2 - Components and SubsystemsSamNo ratings yet
- Unit1 - Basic ConceptsDocument73 pagesUnit1 - Basic ConceptsSharmila83No ratings yet
- Principles of RoboticsDocument81 pagesPrinciples of RoboticssvenkatprasatNo ratings yet
- Chapter 1 Fundamentals of RobotDocument43 pagesChapter 1 Fundamentals of RobotAmanMauryaNo ratings yet
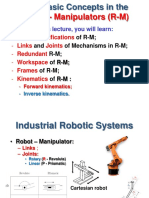
- Teme - 1 (Revision) Some Basic Concepts in Robots Manipulator-Ver 1. of Doz Ivan Avramov 28 Jan 2021Document28 pagesTeme - 1 (Revision) Some Basic Concepts in Robots Manipulator-Ver 1. of Doz Ivan Avramov 28 Jan 2021stanimirNo ratings yet
- Csir Co4 PDFDocument100 pagesCsir Co4 PDFRam MNo ratings yet
- Artificial Intelligence and RoboticsDocument91 pagesArtificial Intelligence and RoboticsadityatheaaaNo ratings yet
- ON "Robotics in Radioactive Enviornment": Technical SeminarDocument31 pagesON "Robotics in Radioactive Enviornment": Technical SeminarAchal NimjeNo ratings yet
- Industrial Robotics: The Heart of Modern ManufacturingDocument36 pagesIndustrial Robotics: The Heart of Modern ManufacturingGaneshNo ratings yet
- AIET-383 Automations and Robotics: Lecture 2: Robot AnatomyDocument31 pagesAIET-383 Automations and Robotics: Lecture 2: Robot AnatomyAyesha KhalidNo ratings yet
- Lec02 ManipulatorsDocument7 pagesLec02 ManipulatorsMohamad YazidNo ratings yet
- Module-1 (Tech and Anaotomy)Document16 pagesModule-1 (Tech and Anaotomy)Aditya UpadhyayNo ratings yet
- Unit I Fundamentals of Robot: Prepared by B.Balasubramanian Ap/Mech CcetDocument40 pagesUnit I Fundamentals of Robot: Prepared by B.Balasubramanian Ap/Mech CcetBala mechNo ratings yet
- Lec 2 Robot ManipulatorsDocument14 pagesLec 2 Robot ManipulatorsAjanthan AlagaratnamNo ratings yet
- Module 1Document45 pagesModule 1yashpalsingh80726No ratings yet
- Space Robotics: Presented by Mahesh Babu.S IV-Btech Electronics and Communication Engineering, SVISTDocument36 pagesSpace Robotics: Presented by Mahesh Babu.S IV-Btech Electronics and Communication Engineering, SVISTANIKET ARKHADENo ratings yet
- Unit 1 Fundamentals of Robots: Sukantho Sikder Electronics DepartmentDocument167 pagesUnit 1 Fundamentals of Robots: Sukantho Sikder Electronics Departmentsukantho sikderNo ratings yet
- Robotics Lectures-1 For Final Year Indir PDFDocument93 pagesRobotics Lectures-1 For Final Year Indir PDFume habibaNo ratings yet
- Classification of Industrial Robots Work Volume Arm Configuration Advantages and Disadvantages of Robot ConfigurationsDocument12 pagesClassification of Industrial Robots Work Volume Arm Configuration Advantages and Disadvantages of Robot ConfigurationsAnonymous kTVBUxrNo ratings yet
- Answer The Following Questions Through The SlidesDocument72 pagesAnswer The Following Questions Through The SlidesNathanael Aklilu EjersaNo ratings yet
- Industrial RoboticsDocument77 pagesIndustrial RoboticsIslam Fouad100% (4)
- RoboticsDocument37 pagesRobotics9944805552No ratings yet
- 2 Robotic Systems ConfigurationsDocument22 pages2 Robotic Systems ConfigurationsAdam MahmoodNo ratings yet
- Unit 1: 6 HRS: Introduction: Basic Concepts, Laws of Robotics, RobotDocument69 pagesUnit 1: 6 HRS: Introduction: Basic Concepts, Laws of Robotics, Robotvithal100% (1)
- Robots in WarfareDocument20 pagesRobots in WarfarejayanthNo ratings yet
- Automation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyDocument30 pagesAutomation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyHaider-e-Karar100% (1)
- Aerobotics TutorialDocument27 pagesAerobotics TutorialzamaksyariNo ratings yet
- Robot Work Envelope and ConfigurationsDocument11 pagesRobot Work Envelope and ConfigurationsAbdus Salam RatanNo ratings yet
- Prestige Institute of Engineering and Science: RoboticsDocument29 pagesPrestige Institute of Engineering and Science: Roboticsvvek10No ratings yet
- Robot ArchitecturesDocument72 pagesRobot ArchitecturesRyder Jhymsen50% (2)
- Robotics Unit1 SlidesDocument65 pagesRobotics Unit1 SlidesJanarthanan BalakrishnasamyNo ratings yet
- Industrial RoboticsDocument19 pagesIndustrial Roboticsthanh_cdt01No ratings yet
- Week2 - Robot TechnologyDocument12 pagesWeek2 - Robot TechnologyEdrianCliffDelPilarNo ratings yet
- Robotics Lecture NoteDocument245 pagesRobotics Lecture NoteAmanuel ChalchisaNo ratings yet
- Unit 1 Introduction RoboticsDocument48 pagesUnit 1 Introduction RoboticsJagraj SinghNo ratings yet
- Selection Parameters For RobotDocument9 pagesSelection Parameters For RobotVaibhav PawarNo ratings yet
- Space RoboticsDocument20 pagesSpace RoboticsDADE ZUBERNo ratings yet
- Controls and Systems EngineeringDocument22 pagesControls and Systems EngineeringSheena BejasaNo ratings yet
- Nota RobotDocument26 pagesNota RobotpnroslindaNo ratings yet
- Introduction To Robotics: A Common View: Robots As HumanoidsDocument24 pagesIntroduction To Robotics: A Common View: Robots As HumanoidsmaniNo ratings yet
- Elements of Mechanical EngineeringDocument76 pagesElements of Mechanical EngineeringArjun Reddy NareddyNo ratings yet
- AE Botics: TutorialDocument42 pagesAE Botics: TutorialUday DuttNo ratings yet
- Advanced Robotics PDFDocument47 pagesAdvanced Robotics PDFAubs ChomaNo ratings yet
- Turning and Boring A specialized treatise for machinists, students in the industrial and engineering schools, and apprentices, on turning and boring methods, etc.From EverandTurning and Boring A specialized treatise for machinists, students in the industrial and engineering schools, and apprentices, on turning and boring methods, etc.No ratings yet
- Radio Control for Model Ships, Boats and AircraftFrom EverandRadio Control for Model Ships, Boats and AircraftRating: 5 out of 5 stars5/5 (1)
- ReproTech, LLC Welcomes New President & CEO, William BraunDocument3 pagesReproTech, LLC Welcomes New President & CEO, William BraunPR.comNo ratings yet
- Soal Pas Myob Kelas Xii GanjilDocument4 pagesSoal Pas Myob Kelas Xii GanjilLank BpNo ratings yet
- Solved SSC CHSL 4 March 2018 Evening Shift Paper With Solutions PDFDocument40 pagesSolved SSC CHSL 4 March 2018 Evening Shift Paper With Solutions PDFSumit VermaNo ratings yet
- Lunch Hour Meetings: Kiwanis Mission:: - Officers & Directors, 2018-2019Document2 pagesLunch Hour Meetings: Kiwanis Mission:: - Officers & Directors, 2018-2019Kiwanis Club of WaycrossNo ratings yet
- Send Me An AngelDocument3 pagesSend Me An AngeldeezersamNo ratings yet
- Bio Lab Report GerminationDocument10 pagesBio Lab Report GerminationOli Damaskova100% (4)
- 03-Volume II-A The MIPS64 Instruction Set (MD00087)Document793 pages03-Volume II-A The MIPS64 Instruction Set (MD00087)miguel gonzalezNo ratings yet
- Filipino Chicken Cordon BleuDocument7 pagesFilipino Chicken Cordon BleuHazel Castro Valentin-VillamorNo ratings yet
- Hirarc Form: 1. Hazard Identification 2. Risk Analysis 3. Risk ControlDocument2 pagesHirarc Form: 1. Hazard Identification 2. Risk Analysis 3. Risk ControlQurratulain Syarifuddinzaini100% (1)
- Julian BanzonDocument10 pagesJulian BanzonEhra Madriaga100% (1)
- JurisprudenceDocument11 pagesJurisprudenceTamojit DasNo ratings yet
- FACT SHEET KidZaniaDocument4 pagesFACT SHEET KidZaniaKiara MpNo ratings yet
- Ham (Son of Noah) - WikipediaDocument3 pagesHam (Son of Noah) - Wikipediamike bNo ratings yet
- Boylestad Circan 3ce Ch02Document18 pagesBoylestad Circan 3ce Ch02sherry mughalNo ratings yet
- 2011 06 13-DI-PER8-Acoustic Insulation Catalogue-Rev 01Document12 pages2011 06 13-DI-PER8-Acoustic Insulation Catalogue-Rev 01Tien PhamNo ratings yet
- E F Eng l1 l2 Si 011Document2 pagesE F Eng l1 l2 Si 011Simona ButeNo ratings yet
- Dry Wall, Ceiling, and Painting WorksDocument29 pagesDry Wall, Ceiling, and Painting WorksFrance Ivan Ais100% (1)
- Test Bank For Cognitive Psychology Connecting Mind Research and Everyday Experience 3rd Edition e Bruce GoldsteinDocument24 pagesTest Bank For Cognitive Psychology Connecting Mind Research and Everyday Experience 3rd Edition e Bruce GoldsteinMichaelThomasyqdi100% (49)
- Three Categories of AutismDocument14 pagesThree Categories of Autismapi-327260204No ratings yet
- The Development of Poetry in The Victorian AgeDocument4 pagesThe Development of Poetry in The Victorian AgeTaibur Rahaman0% (1)
- Chap6 Part1Document15 pagesChap6 Part1Francis Renjade Oafallas VinuyaNo ratings yet
- Does Social Media Influence Consumer Buying Behavior An Investigation of Recommendations and PurchasesDocument7 pagesDoes Social Media Influence Consumer Buying Behavior An Investigation of Recommendations and Purchasesyash_28No ratings yet
- 2U6 S4HANA1909 Set-Up EN XXDocument10 pages2U6 S4HANA1909 Set-Up EN XXGerson Antonio MocelimNo ratings yet
- Dialogue About Handling ComplaintDocument3 pagesDialogue About Handling ComplaintKarimah Rameli100% (4)
- Types of Vegetation in Western EuropeDocument12 pagesTypes of Vegetation in Western EuropeChemutai EzekielNo ratings yet
- 06 Ankit Jain - Current Scenario of Venture CapitalDocument38 pages06 Ankit Jain - Current Scenario of Venture CapitalSanjay KashyapNo ratings yet
- Harper 2001Document6 pagesHarper 2001Elena GologanNo ratings yet
- Venue:: Alberta Electrical System Alberta Electrical System OperatorDocument48 pagesVenue:: Alberta Electrical System Alberta Electrical System OperatorOmar fethiNo ratings yet
- College PrepDocument2 pagesCollege Prepapi-322377992No ratings yet
- Inventory Management Final ProjectDocument65 pagesInventory Management Final ProjectMAHESH MUTHYALANo ratings yet