You might also like
- 16 PDFDocument129 pages16 PDFgNo ratings yet
- Ship Stability: Stable EquilibriumDocument10 pagesShip Stability: Stable Equilibriumioana155No ratings yet
- 4360 GfaDocument3 pages4360 GfaEr Rajesh BuraNo ratings yet
- Effects of Bearing Currents on Motor BearingsDocument17 pagesEffects of Bearing Currents on Motor BearingsHarris AnchesNo ratings yet
- SORG EquipmentDocument56 pagesSORG Equipmentl0% (2)
- GED Physics Motion ForcesDocument4 pagesGED Physics Motion ForcesShahadat Hussain Parvez100% (2)
- Electromagnetic Levitation System: An Experimental ApproachDocument7 pagesElectromagnetic Levitation System: An Experimental Approachsh1n00b1No ratings yet
- GOENAGA APEC2013 Contactless Transfert Energy Piezoelectric ActuatorDocument9 pagesGOENAGA APEC2013 Contactless Transfert Energy Piezoelectric Actuatorjasta 11No ratings yet
- ECE 476 Power System Protection and Transient StabilityDocument31 pagesECE 476 Power System Protection and Transient Stabilitypop papNo ratings yet
- Operation Characteristics Improvement of Linear Synchronous Motor With Half-Wave Rectified Self ExcitationDocument4 pagesOperation Characteristics Improvement of Linear Synchronous Motor With Half-Wave Rectified Self ExcitationHuong ThaoNo ratings yet
- On The Stability of Volts-per-Hertz Control For Induction MotorsDocument10 pagesOn The Stability of Volts-per-Hertz Control For Induction Motorsm tpNo ratings yet
- Small Signal Modeling and Analysis of Synchronverters: Zhou Wei, Chen Jie and Gong ChunyingDocument5 pagesSmall Signal Modeling and Analysis of Synchronverters: Zhou Wei, Chen Jie and Gong ChunyingEnimien AymenNo ratings yet
- Design of A New Area Control Error Based Load Frequency Controller For A Two-Area Interconnected Power SystemDocument5 pagesDesign of A New Area Control Error Based Load Frequency Controller For A Two-Area Interconnected Power SystemzahidNo ratings yet
- Robust Nonlinear Controller Design For Transient Stability Enhancement of Power SystemsDocument6 pagesRobust Nonlinear Controller Design For Transient Stability Enhancement of Power Systemsshaban sattiNo ratings yet
- Robust Computer Control An Inverted Pendulum: Medrano-CerdaDocument10 pagesRobust Computer Control An Inverted Pendulum: Medrano-CerdaVictor PassosNo ratings yet
- INTECH-Genetic Algorithm and Simulated AnnealingApplication To Subsynchronous Damping Control in Electrical Power Transmission SystemsDocument27 pagesINTECH-Genetic Algorithm and Simulated AnnealingApplication To Subsynchronous Damping Control in Electrical Power Transmission SystemsJuan David MesaNo ratings yet
- Adaptive Microcomputer: Controller ImplementationDocument11 pagesAdaptive Microcomputer: Controller ImplementationToe Zune MayNo ratings yet
- Sensorless Control of PMSM Motors Using Novel Estimation MethodsDocument25 pagesSensorless Control of PMSM Motors Using Novel Estimation MethodsSteve DemirelNo ratings yet
- Synergetic and Sliding Mode Controls of A PMSM: A Comparative StudyDocument5 pagesSynergetic and Sliding Mode Controls of A PMSM: A Comparative StudymellahNo ratings yet
- Pulsewidth Modulation A SurveyDocument8 pagesPulsewidth Modulation A SurveyDr-Ismayil CNo ratings yet
- Nonlinear Model & Controller Design For Magnetic Levitation SystemDocument6 pagesNonlinear Model & Controller Design For Magnetic Levitation SystemHoàng GiangNo ratings yet
- 柔性关节自适应控制Document8 pages柔性关节自适应控制文龙No ratings yet
- Thermal Considerations For Y Capacitors in Wide Band-Gap Based InvertersDocument6 pagesThermal Considerations For Y Capacitors in Wide Band-Gap Based InvertersMaurizio TrancheroNo ratings yet
- Computer Simulation Model of A Lift Car Assembly With An Active Tuned Mass DamperDocument6 pagesComputer Simulation Model of A Lift Car Assembly With An Active Tuned Mass DamperfreddyjoertyNo ratings yet
- Modelling and Control of An Electromechanical SteeringDocument11 pagesModelling and Control of An Electromechanical Steeringrency gil engoNo ratings yet
- Experiment # 3 Mathematical Modelling and Simulation of Mechanical SystemsDocument7 pagesExperiment # 3 Mathematical Modelling and Simulation of Mechanical SystemsFahad AneebNo ratings yet
- 82---10.1109@rteict46194.2019.9016821Document5 pages82---10.1109@rteict46194.2019.9016821faisal waseemNo ratings yet
- A Closed Loop Quasi Optical Dynamic Brak PDFDocument8 pagesA Closed Loop Quasi Optical Dynamic Brak PDFDante FilhoNo ratings yet
- Modelling and Investigations of Electrohydraulic Servo Valve With Piezo ElementDocument8 pagesModelling and Investigations of Electrohydraulic Servo Valve With Piezo Elementleena175No ratings yet
- RM 2019 1 Pag 04 HongDocument4 pagesRM 2019 1 Pag 04 HongLê TrungNo ratings yet
- Technology: Schweppe CambridgeDocument6 pagesTechnology: Schweppe CambridgeAnonymous eOLCLhNo ratings yet
- Second Order Hydraulic Turbine Models For Multimachine Stability StudiesDocument6 pagesSecond Order Hydraulic Turbine Models For Multimachine Stability StudiesFelix GamarraNo ratings yet
- Transient Stability Enhancement by TCSC Controllers Using Remote Input SignalsDocument5 pagesTransient Stability Enhancement by TCSC Controllers Using Remote Input SignalsAbdullah BilalNo ratings yet
- System Level Simulation of Servo Accelerometer in SimulinkDocument8 pagesSystem Level Simulation of Servo Accelerometer in Simulinkohpigha6048No ratings yet
- Field Test Process After Commissioning A New Exciter SystemDocument7 pagesField Test Process After Commissioning A New Exciter SystemvanitaNo ratings yet
- ZFGHFGHFGDocument6 pagesZFGHFGHFGAhmad Firdaus Zawawil AnwarNo ratings yet
- Chapter 2: Principle of Operation of An AccelerometerDocument5 pagesChapter 2: Principle of Operation of An AccelerometerENRIQUENo ratings yet
- Principle of Operation of An AccelerometerDocument5 pagesPrinciple of Operation of An AccelerometersangeethsreeniNo ratings yet
- Position Sensor Based Torque ControlDocument4 pagesPosition Sensor Based Torque ControlChandrajit GangulyNo ratings yet
- Trajectory - Tracking - of - A - Pneumatically - Driven - PDocument6 pagesTrajectory - Tracking - of - A - Pneumatically - Driven - PQuyết Nguyễn CôngNo ratings yet
- Friction and Rigid-Body Identification of Robots With Parallel Kinematic StructuresDocument6 pagesFriction and Rigid-Body Identification of Robots With Parallel Kinematic StructuresTrần Anh TuấnNo ratings yet
- Hybrid Control of Load Simulator For Unmanned Aerial Vehicle Based On Wavelet NetworksDocument5 pagesHybrid Control of Load Simulator For Unmanned Aerial Vehicle Based On Wavelet NetworksPhuc Pham XuanNo ratings yet
- Dynamic Analysis of Gear and Rack Transmission SysDocument6 pagesDynamic Analysis of Gear and Rack Transmission SysEverest Engineering Lead R&DNo ratings yet
- Parameter Extraction and Support-Loss in MEMS Resonators: Abstract: in This Paper It Is Shown How The EquivalentDocument6 pagesParameter Extraction and Support-Loss in MEMS Resonators: Abstract: in This Paper It Is Shown How The EquivalentVoet ZoekerNo ratings yet
- AUTO1029 2014 Assignment 2Document2 pagesAUTO1029 2014 Assignment 2LEYNER IGNACIO CORREANo ratings yet
- Transient (Angle) StabilityDocument102 pagesTransient (Angle) StabilityAnonymous 48HbyFUSDNo ratings yet
- Direct Torque Control of PMSM Using Fuzz PDFDocument7 pagesDirect Torque Control of PMSM Using Fuzz PDFImam Muhammad HakimNo ratings yet
- CH 19Document18 pagesCH 19Dr. Rama Raju KunadharajuNo ratings yet
- Discontinuous SVPWM TechniquesDocument6 pagesDiscontinuous SVPWM TechniquesAnonymous 1D3dCWNcNo ratings yet
- Real Time Stabilisation Triple Link Inverted: Pendulum Using Single Control InputDocument7 pagesReal Time Stabilisation Triple Link Inverted: Pendulum Using Single Control InputKuldeep KumarNo ratings yet
- Inter University Microelectronics Center (IMEC), Leuven, Belgium Holst Centre/IMEC Netherlands, Eindhoven, The NetherlandsDocument4 pagesInter University Microelectronics Center (IMEC), Leuven, Belgium Holst Centre/IMEC Netherlands, Eindhoven, The NetherlandsMichael_Renaud4873No ratings yet
- Loss of Excitation Protection for Synchronous GeneratorsDocument14 pagesLoss of Excitation Protection for Synchronous GeneratorsPraveen PeethambaranNo ratings yet
- Bifurcation chaos camless EMVDocument14 pagesBifurcation chaos camless EMVRené Mboyo KouayepNo ratings yet
- Neuro-Fuzzy DTC for DFIM Reactive Power ControlDocument7 pagesNeuro-Fuzzy DTC for DFIM Reactive Power ControlAves de Herveo - TolimaNo ratings yet
- SMC pitch control for variable speed wind turbine considering actuator dynamicsDocument5 pagesSMC pitch control for variable speed wind turbine considering actuator dynamicsDuyên Nguyễn NgọcNo ratings yet
- Random Eletrical TextbookDocument3 pagesRandom Eletrical Textbookenoch tobeNo ratings yet
- 2004 CSAcoust SimDocument6 pages2004 CSAcoust SimberndNo ratings yet
- Active Feedbackdamping SystemDocument11 pagesActive Feedbackdamping SystemAkash AkuNo ratings yet
- Chiasson - Bodson - Control of A Shunt DC MotorDocument5 pagesChiasson - Bodson - Control of A Shunt DC MotormorilloatilioNo ratings yet
- Mcqs On Control SystemDocument59 pagesMcqs On Control SystemAmeen UllahNo ratings yet
- Fast Dynamic Control of Medium Voltage Drives Operating at Very Low Switching Frequency - An OverviewDocument8 pagesFast Dynamic Control of Medium Voltage Drives Operating at Very Low Switching Frequency - An Overviewনাঈমুর রহমানNo ratings yet
- Field Weakening With Nonlinear Controller Design For An Interior Permanent Magnet Synchronous MotorDocument6 pagesField Weakening With Nonlinear Controller Design For An Interior Permanent Magnet Synchronous MotorAli H. NumanNo ratings yet
- Optimal Control of Electromagnetic Suspension EMS System: Anan SuebsomranDocument8 pagesOptimal Control of Electromagnetic Suspension EMS System: Anan SuebsomranBarkhad MohamedNo ratings yet
- Petráš, I. 2009 Fractional-Order Feedback Control of A DC Motor Journal of ElectricalDocument12 pagesPetráš, I. 2009 Fractional-Order Feedback Control of A DC Motor Journal of ElectricalcharifNo ratings yet
- Energetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationFrom EverandEnergetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- 18 Art CarsteaDocument4 pages18 Art Carsteaplamadeala.vasile.tudorNo ratings yet
- 20 Art BostanDocument4 pages20 Art Bostanplamadeala.vasile.tudorNo ratings yet
- 19 Art CirnuDocument5 pages19 Art Cirnuplamadeala.vasile.tudorNo ratings yet
- 18 Art CarsteaDocument4 pages18 Art Carsteaplamadeala.vasile.tudorNo ratings yet
- 15 Art TurcanuDocument2 pages15 Art Turcanuplamadeala.vasile.tudorNo ratings yet
- 3 Articol Chiorsac MDocument2 pages3 Articol Chiorsac Mplamadeala.vasile.tudorNo ratings yet
- 9 Art Oprea DDocument4 pages9 Art Oprea Dplamadeala.vasile.tudorNo ratings yet
- 7 Art BuzdugaDocument5 pages7 Art Buzdugaplamadeala.vasile.tudorNo ratings yet
- 5 Art Musteata GDocument3 pages5 Art Musteata Gplamadeala.vasile.tudorNo ratings yet
- 1 L Bugaian CycleDocument4 pages1 L Bugaian Cycleplamadeala.vasile.tudorNo ratings yet
- Jes 2019 2Document129 pagesJes 2019 2plamadeala.vasile.tudorNo ratings yet
- 2 Articol SajinDocument8 pages2 Articol Sajinplamadeala.vasile.tudorNo ratings yet
- Turbinas Evaporativas de GasDocument158 pagesTurbinas Evaporativas de GasluijamurNo ratings yet
- (20837429 - Polish Maritime Research) Design and Strength Calculations of The Tripod Support Structure For Offshore Power PlantDocument11 pages(20837429 - Polish Maritime Research) Design and Strength Calculations of The Tripod Support Structure For Offshore Power PlantLuthfi Rasyid100% (1)
- Catálogo Binzel - Consumíveis (Spare Parts) 2008-2009Document158 pagesCatálogo Binzel - Consumíveis (Spare Parts) 2008-2009MauroDosSantosCostaNo ratings yet
- Mass Transfer Aka Sir AssignmentDocument4 pagesMass Transfer Aka Sir Assignmentওয়াসিমNo ratings yet
- API PLAN 62 - Installation of Steam Traps in Steam QuenchDocument3 pagesAPI PLAN 62 - Installation of Steam Traps in Steam Quenchrmehta26No ratings yet
- AMT 214 Reviewer (Oral)Document2 pagesAMT 214 Reviewer (Oral)Edjayde GodinezNo ratings yet
- PID Line Following RobotDocument20 pagesPID Line Following RobotAchmad Fiqhi IbadillahNo ratings yet
- Laws of ThermodynamicsDocument34 pagesLaws of ThermodynamicshashimsaadfamilyNo ratings yet
- 1 CBDocument1 page1 CBDickyAlamsyah32No ratings yet
- Compair New Style Line Elements PDFDocument6 pagesCompair New Style Line Elements PDFmuppetscrapNo ratings yet
- UK Datasheet (Lug)Document18 pagesUK Datasheet (Lug)Ahmer AliNo ratings yet
- Neuson 8002 RDDocument103 pagesNeuson 8002 RDPierpaolo GustinNo ratings yet
- IC Engine WorksheetDocument4 pagesIC Engine WorksheetNIKNo ratings yet
- Isuzu Specification - NKR 2011Document2 pagesIsuzu Specification - NKR 2011CARSMART PhilippinesNo ratings yet
- Benefit KomtraxDocument19 pagesBenefit KomtraxDaniel Garnando KristianNo ratings yet
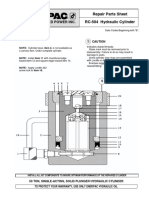
- Manuel de Partes y Reparacion Cilindro RC 504Document2 pagesManuel de Partes y Reparacion Cilindro RC 504Mauricio Hermosilla OrellanaNo ratings yet
- Dyrhh Steam Turbine: High Back-Pressure, Large Frame Single-Stage Steam TurbineDocument2 pagesDyrhh Steam Turbine: High Back-Pressure, Large Frame Single-Stage Steam Turbineameya natuNo ratings yet
- ROHR2 InterfacesDocument16 pagesROHR2 InterfacesMarcia Akutsu MainardiNo ratings yet
- Numerical Modelling of Laterally Loaded Single Pile: A.Lakshmi RishithaDocument102 pagesNumerical Modelling of Laterally Loaded Single Pile: A.Lakshmi RishithaAkhilesh Kumar SinghNo ratings yet
- Hitachi Zaxis Excavators Outperform Competition in Trenching and Truck LoadingDocument9 pagesHitachi Zaxis Excavators Outperform Competition in Trenching and Truck LoadingWai Yan LinNo ratings yet
- Chemical potential as a measure of energy changes in thermodynamic systemsDocument4 pagesChemical potential as a measure of energy changes in thermodynamic systemsAmmar SangeNo ratings yet
- 6020B Slow Return Check ValveDocument3 pages6020B Slow Return Check Valvezawmoe aungNo ratings yet
- Ese Reference BooksDocument3 pagesEse Reference BooksVivek SinghNo ratings yet
- JC10 JOYSTICK CONTROL SYSTEM OPERATION MANUAL - Unlocked (OCR)Document32 pagesJC10 JOYSTICK CONTROL SYSTEM OPERATION MANUAL - Unlocked (OCR)이리재No ratings yet