You might also like
- Shreve I I Solutions Chapter 07Document8 pagesShreve I I Solutions Chapter 07Anirudh KodaliNo ratings yet
- AQA A Level Mathematics Year 2 Sample Chapters PDFDocument64 pagesAQA A Level Mathematics Year 2 Sample Chapters PDFswatiNo ratings yet
- IIT BHU MA-201 Tutorial 10: Confidence Intervals and MLE EstimationDocument4 pagesIIT BHU MA-201 Tutorial 10: Confidence Intervals and MLE EstimationUjjwal BansalNo ratings yet
- FORMULA SHEET and The TABLESDocument10 pagesFORMULA SHEET and The TABLESWiSeVirGoNo ratings yet
- 362assn7 SolnsDocument4 pages362assn7 SolnsKasih PanduNo ratings yet
- MTH 515a: Asymptotically Efficient EstimatorsDocument3 pagesMTH 515a: Asymptotically Efficient EstimatorsMulyana KahfiNo ratings yet
- An Efficient Determination of PiDocument7 pagesAn Efficient Determination of PijeamichelNo ratings yet
- Statistical Inference II Lecture Material IIIDocument31 pagesStatistical Inference II Lecture Material IIIMd Abdul BasitNo ratings yet
- Application cases of Bayesian inference with different priorsDocument5 pagesApplication cases of Bayesian inference with different priorsdavid francisco bustos ustaNo ratings yet
- MSexam Stat 2016S SolutionDocument11 pagesMSexam Stat 2016S SolutionRobinson Ortega MezaNo ratings yet
- Unbiased EstimatorDocument70 pagesUnbiased EstimatorSergioNo ratings yet
- Indian Institute of Science: Problem 1Document4 pagesIndian Institute of Science: Problem 1ChandreshSinghNo ratings yet
- Conc GraphDocument8 pagesConc GraphSubhankar GhoshNo ratings yet
- Ejemplo de Inferencia UmvueDocument10 pagesEjemplo de Inferencia UmvueRobinson Ortega MezaNo ratings yet
- Approximation Methods in Quantum MechanicsDocument10 pagesApproximation Methods in Quantum MechanicsJohn100% (1)
- Math 121A: Homework 7 SolutionsDocument9 pagesMath 121A: Homework 7 SolutionscfisicasterNo ratings yet
- Formula Sheet - FinalDocument3 pagesFormula Sheet - FinalkevinNo ratings yet
- Lecture4 More BayesDocument24 pagesLecture4 More BayesAla BalaNo ratings yet
- STAT 210B HWK #5 SOLUTIONSDocument5 pagesSTAT 210B HWK #5 SOLUTIONSDaniyal AsifNo ratings yet
- CR12: Statistical Learning & ApplicationsDocument8 pagesCR12: Statistical Learning & ApplicationsNo12n533No ratings yet
- Formulas For The Final ExamDocument3 pagesFormulas For The Final ExamTrisha Faith AlberNo ratings yet
- 1 The Black-Scholes Formula For A European Call or Put: 1.1 Evaluation of European OptionsDocument15 pages1 The Black-Scholes Formula For A European Call or Put: 1.1 Evaluation of European Optionshenry37302No ratings yet
- Power Series Solutions To The Legendre Equation: Department of Mathematics IIT GuwahatiDocument15 pagesPower Series Solutions To The Legendre Equation: Department of Mathematics IIT Guwahatiferwa shoukatNo ratings yet
- Problem Set 7 Solution Set Math 112 Spring 2002Document6 pagesProblem Set 7 Solution Set Math 112 Spring 2002wieirraNo ratings yet
- Bayesian Likelihood and Inference HomeworkDocument4 pagesBayesian Likelihood and Inference Homework何明涛No ratings yet
- List of FormulaDocument3 pagesList of FormulaaqaazNo ratings yet
- Dr. Alexander Schaum Chair of Automatic Control, Christian-Albrechts-University KielDocument4 pagesDr. Alexander Schaum Chair of Automatic Control, Christian-Albrechts-University KielkevweNo ratings yet
- 3P0 Wave Function PDFDocument30 pages3P0 Wave Function PDFMario SánchezNo ratings yet
- 2009 Unbiased Estimate & Confidence IntervalDocument8 pages2009 Unbiased Estimate & Confidence Intervalfabremil74720% (1)
- BQQ6214 STATISTICAL FORMULAE (1)Document3 pagesBQQ6214 STATISTICAL FORMULAE (1)Robert OoNo ratings yet
- Formulas 2 1Document3 pagesFormulas 2 1Luca OrtizNo ratings yet
- FIS-502: Mathematical Physics I: Assignment 6Document4 pagesFIS-502: Mathematical Physics I: Assignment 6Tanya0% (1)
- Estimation Theory EngDocument40 pagesEstimation Theory EngVe EKNo ratings yet
- Differentiation of Vectors: Solutions: Example 4.1Document6 pagesDifferentiation of Vectors: Solutions: Example 4.1Dimas GunturNo ratings yet
- s131 Reviewer 002Document14 pagess131 Reviewer 002lucy heartfiliaNo ratings yet
- 45 Power Series Solutions of Legendre Equations 15-10-2019 (15 Oct 2019) Material - I - 15 Oct 2019 - PowerDocument14 pages45 Power Series Solutions of Legendre Equations 15-10-2019 (15 Oct 2019) Material - I - 15 Oct 2019 - PowerParth VijayNo ratings yet
- MSexam Stat 2016F SolutionDocument11 pagesMSexam Stat 2016F SolutionRobinson Ortega MezaNo ratings yet
- Lecture 05_addendum_Chisquare,t and F distributionsDocument4 pagesLecture 05_addendum_Chisquare,t and F distributionsSayantan MajhiNo ratings yet
- Chap 5.1Document5 pagesChap 5.1meghaNo ratings yet
- Final Cheat Sheet!Document1 pageFinal Cheat Sheet!target1010101No ratings yet
- MTH 424 IITK Quiz SolutionsDocument2 pagesMTH 424 IITK Quiz SolutionsMayur GuptaNo ratings yet
- DSP FormulaDocument2 pagesDSP Formuladangtran_namNo ratings yet
- Formula SheetDocument3 pagesFormula SheetgogogogoNo ratings yet
- 1. Poisson processes and continuous-time Markov chains-1Document4 pages1. Poisson processes and continuous-time Markov chains-1rrbygzvalathxgnhsqNo ratings yet
- Stat 212 April 10 NotesDocument3 pagesStat 212 April 10 NotesAlan ChungNo ratings yet
- Decision TheoryDocument8 pagesDecision TheorypictureswithmotionNo ratings yet
- Minimization of Dirichlet SeriesDocument7 pagesMinimization of Dirichlet SeriesMireille DaoutNo ratings yet
- Poster Transport PDFDocument1 pagePoster Transport PDFSalvador MartínezNo ratings yet
- Formula List and Statistical Tables Formula List and Statistical TablesDocument8 pagesFormula List and Statistical Tables Formula List and Statistical Tables赵博No ratings yet
- Stimation: StatisticDocument46 pagesStimation: Statisticمحمد بركاتNo ratings yet
- p20 ReprintDocument21 pagesp20 ReprintaldoNo ratings yet
- chap6Document16 pageschap6김민성No ratings yet
- Article A Generalization of Powers-StørmerDocument8 pagesArticle A Generalization of Powers-StørmerThuy LanhNo ratings yet
- VE564 Homework 1Document2 pagesVE564 Homework 1Haorui LiNo ratings yet
- Formulas for statistical testsDocument15 pagesFormulas for statistical testsSaroj patelNo ratings yet
- Test of Equal CovarianceDocument5 pagesTest of Equal CovarianceMinNo ratings yet
- Curve Alignment With Known CorrespondencesDocument3 pagesCurve Alignment With Known CorrespondencesAmadeusNo ratings yet
- Back Pages of ExamDocument8 pagesBack Pages of Examfiren1388No ratings yet
- Formula Sheet Statistics IIDocument5 pagesFormula Sheet Statistics IIJoão PinhoNo ratings yet
- C.A.T MARKING SCHEME breakdownDocument4 pagesC.A.T MARKING SCHEME breakdownPatrick MugoNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Instructions For Preparation of Papers in A B5 Format For Laboratory Competence 2016Document4 pagesInstructions For Preparation of Papers in A B5 Format For Laboratory Competence 2016DanielNo ratings yet
- PMPH120 - Lab 3 - SHM and Spring Constant - SolutionsDocument11 pagesPMPH120 - Lab 3 - SHM and Spring Constant - SolutionsTavonga ShokoNo ratings yet
- UntitledDocument11 pagesUntitledapi-197704391No ratings yet
- Statistics LectureDocument35 pagesStatistics LectureEPOY JERSNo ratings yet
- PeterDocument30 pagesPeterJoão BeliniNo ratings yet
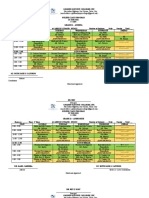
- 7 19 Updated Grade 11 Students Online Schedule 2021 2022 1st SemDocument8 pages7 19 Updated Grade 11 Students Online Schedule 2021 2022 1st SemAngelo MartinezNo ratings yet
- Introduction To The Theory of Infinite-Dimensional Dissipative Systems-PrefacioDocument9 pagesIntroduction To The Theory of Infinite-Dimensional Dissipative Systems-PrefaciovictorNo ratings yet
- GSI: A GEOLOGICALLY FRIENDLY TOOL FOR ROCK MASS STRENGTH ESTIMATION - Marinos & HoekDocument12 pagesGSI: A GEOLOGICALLY FRIENDLY TOOL FOR ROCK MASS STRENGTH ESTIMATION - Marinos & HoekJohan Van StaverenNo ratings yet
- NPTEL Transcript PDFDocument977 pagesNPTEL Transcript PDFLakshmiNarayana Reddy BynagariNo ratings yet
- FPP Week 1 2 Lecture SlidesDocument84 pagesFPP Week 1 2 Lecture SlidesestifNo ratings yet
- Spin CalcDocument8 pagesSpin Calcrefaat100No ratings yet
- Simple Harmonic MotionDocument17 pagesSimple Harmonic MotionChirag Hablani100% (1)
- Mcqs 1Document12 pagesMcqs 1Ralitsa DeeDee Wilcox100% (1)
- G7 U5m10 Te PDFDocument34 pagesG7 U5m10 Te PDFAhmed SalemNo ratings yet
- Aps CheckDocument462 pagesAps CheckPuja Somal100% (1)
- Fast CountDocument5 pagesFast CountMcan AlkanNo ratings yet
- Syllabus: B. Sc. Computer ScienceDocument79 pagesSyllabus: B. Sc. Computer Scienceapi-545722857No ratings yet
- Beginners Tutorial: Issue Status/Number - 1.0 Issue Date - 10 November, 2002Document17 pagesBeginners Tutorial: Issue Status/Number - 1.0 Issue Date - 10 November, 2002nathulalusaNo ratings yet
- BEE-Module-3 Kirchhoff's LawDocument30 pagesBEE-Module-3 Kirchhoff's LawMARK JOHN AL RODAVIANo ratings yet
- ANSYS Mechanical APDL Modeling and Meshing GuideDocument236 pagesANSYS Mechanical APDL Modeling and Meshing GuideJayakrishnan P SNo ratings yet
- ME 612 Sheet Metal Bending Theory and Plasticity GuideDocument19 pagesME 612 Sheet Metal Bending Theory and Plasticity GuideAbdullah Al FikriNo ratings yet
- Roadmap For Quant 1705217537Document10 pagesRoadmap For Quant 1705217537VaibhavNo ratings yet
- Place Value of Whole Numbers: Try The Following QuestionsDocument12 pagesPlace Value of Whole Numbers: Try The Following QuestionsNatasha AndrewsNo ratings yet
- Barcelo - Computational Intelligence in ArchaeologyDocument437 pagesBarcelo - Computational Intelligence in Archaeologyhristijan_anch100% (1)
- Chapter 5Document28 pagesChapter 5Shoaib ZaheerNo ratings yet
- Lecture Notes On The Statistical Mechanics of Disordered SystemsDocument14 pagesLecture Notes On The Statistical Mechanics of Disordered SystemsJohn BirdNo ratings yet
- Mind MapDocument1 pageMind MapJhuwen Acob ValdezNo ratings yet
- Statistical Methods For Economics 2020Document3 pagesStatistical Methods For Economics 2020Vineet AgrahariNo ratings yet
- Introduction To Heat Transfer - S. K. Som PDFDocument570 pagesIntroduction To Heat Transfer - S. K. Som PDFMoinak Sarkar100% (1)