You might also like
- Dubai 1Document17 pagesDubai 1ani ni musNo ratings yet
- Evaluation of Performance of GPS Receiver in CRRI Network Survey VehicleDocument7 pagesEvaluation of Performance of GPS Receiver in CRRI Network Survey VehicleRahul KumarNo ratings yet
- TV 25 2018 1 158 163Document6 pagesTV 25 2018 1 158 163IamEm B. MoNo ratings yet
- A Simplified NMEA Sentence Generator For The Simulation of GPS TrackingDocument8 pagesA Simplified NMEA Sentence Generator For The Simulation of GPS TrackingsivalaNo ratings yet
- Real Time GPS Networks (RTN) and Their Implications With Geographic Information Systems (GIS)Document12 pagesReal Time GPS Networks (RTN) and Their Implications With Geographic Information Systems (GIS)bilalnirbanNo ratings yet
- DGPS AccuracyDocument25 pagesDGPS AccuracyBHUSHAN KANOJ100% (1)
- Evaluation of Performance of GPS Receiver in CRRIDocument8 pagesEvaluation of Performance of GPS Receiver in CRRIMuani HmarNo ratings yet
- Evaluation of Performance of GPS Receiver in CRRIDocument8 pagesEvaluation of Performance of GPS Receiver in CRRIsaksham dixitNo ratings yet
- GPS RTK Performance Characteristics and AnalysisDocument8 pagesGPS RTK Performance Characteristics and AnalysisThanate JongrujinanNo ratings yet
- DGPS 28oct, 2010 EdusatDocument28 pagesDGPS 28oct, 2010 EdusatsgrrscNo ratings yet
- Irnss Data Processing IJERTCONV9IS12030Document5 pagesIrnss Data Processing IJERTCONV9IS12030Nikitha ReddyNo ratings yet
- Analyzing Accuracy of Online GNSS Positioning ServicesDocument14 pagesAnalyzing Accuracy of Online GNSS Positioning ServicesAnonymous OtTJKAritNo ratings yet
- DGPS, RTK-GPS and StarFire Performance Under Tree CanopiesDocument7 pagesDGPS, RTK-GPS and StarFire Performance Under Tree CanopiesKray TharaNo ratings yet
- DGPS Explained: How Differential Correction Improves GPS AccuracyDocument5 pagesDGPS Explained: How Differential Correction Improves GPS AccuracyGanga BasinNo ratings yet
- Performance Analysis of Different Positioning Modes in RTKLIB SoftwareDocument12 pagesPerformance Analysis of Different Positioning Modes in RTKLIB Softwarehani aprilianiNo ratings yet
- A Data Quality Assessment Approach For High-PrecisDocument22 pagesA Data Quality Assessment Approach For High-Preciskyambadde hudsonNo ratings yet
- Gps (Global Positioning System)Document14 pagesGps (Global Positioning System)Ekansh GuptaNo ratings yet
- 2020.01.10 - Airborne Testing of The Dss Test Results and AnalysisDocument6 pages2020.01.10 - Airborne Testing of The Dss Test Results and AnalysisarashNo ratings yet
- Differential GPS ExplainedDocument5 pagesDifferential GPS Explained87291472BG100% (2)
- GPS Data and Correction ServicesDocument3 pagesGPS Data and Correction ServicesEvelyn Angarita GarciaNo ratings yet
- Satellite Navigation (GPS)Document28 pagesSatellite Navigation (GPS)NAJA MOHAMEDNo ratings yet
- Isprs Archives XLI B6 221 2016Document6 pagesIsprs Archives XLI B6 221 2016Sudung SitumorangNo ratings yet
- Evaluating RTKLIB's Positioning Accuracy Using Low-Cost GNSSDocument7 pagesEvaluating RTKLIB's Positioning Accuracy Using Low-Cost GNSSSudung SitumorangNo ratings yet
- TreasureSS PTechDocument52 pagesTreasureSS PTechruddyrezzaNo ratings yet
- GPSDocument35 pagesGPSak721No ratings yet
- Bec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemDocument39 pagesBec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemAlvinchiew CSNo ratings yet
- Real-Time Kinematic Positioning With NASA's Internet-Based Global Differential GPS (IGDG)Document10 pagesReal-Time Kinematic Positioning With NASA's Internet-Based Global Differential GPS (IGDG)Hammam AbdurrahmanNo ratings yet
- Reverse RTK Technical PaperDocument6 pagesReverse RTK Technical PaperIkram OthmanNo ratings yet
- Accuracy Investigation of PPP Method Versus Relative Positioning Using Different Satellite Ephemerides Products NearUnder Forest EnvironmentDocument10 pagesAccuracy Investigation of PPP Method Versus Relative Positioning Using Different Satellite Ephemerides Products NearUnder Forest EnvironmentSolNo ratings yet
- FinalpaperDocument5 pagesFinalpaperJosé Manuel Ortiz RodriguezNo ratings yet
- AGF - Lidar For GCP Determination in Topographic Mapping Scale 1:50.000Document13 pagesAGF - Lidar For GCP Determination in Topographic Mapping Scale 1:50.000Aji Putra Perdana100% (1)
- Surveying With GPSDocument6 pagesSurveying With GPSkevincoperNo ratings yet
- Gps DiferencialDocument5 pagesGps Diferencialheidipch93No ratings yet
- 3D Mapping of Selected Regions Using NavIC ReceiversDocument12 pages3D Mapping of Selected Regions Using NavIC ReceiversInternational Journal of Innovative Science and Research Technology100% (1)
- GPS SurveyingDocument5 pagesGPS Surveyingsaravanakumar100% (1)
- Quality Assessment of A Network-Based RTK GPS ServDocument13 pagesQuality Assessment of A Network-Based RTK GPS ServSergiy PogoryelovNo ratings yet
- GPSR ThesisDocument5 pagesGPSR Thesisafcnyiatk100% (2)
- Satellite Based SurveyingDocument8 pagesSatellite Based SurveyingMusiime AlvinNo ratings yet
- Chapter 1 - Differential GPS: RTO-AG-160-V21 1 - 1Document18 pagesChapter 1 - Differential GPS: RTO-AG-160-V21 1 - 1ravifireblade8402No ratings yet
- Direct Georeferencing 3D Points Cloud Map Based On SLAM and Robot Operating SystemDocument5 pagesDirect Georeferencing 3D Points Cloud Map Based On SLAM and Robot Operating SystemFraj HarizNo ratings yet
- Amdl Intro To GPSDocument29 pagesAmdl Intro To GPSgaurang1111No ratings yet
- Implementation and Statistical Analysis of A Differential GPS SystemDocument61 pagesImplementation and Statistical Analysis of A Differential GPS SystemRajesh KarriNo ratings yet
- DGPS-Report_BajhangDocument18 pagesDGPS-Report_BajhangPrekshan SubediNo ratings yet
- GPS For SurveyorsDocument14 pagesGPS For SurveyorsChamara PrasannaNo ratings yet
- My RTK NetDocument25 pagesMy RTK Nethazaldin taib50% (4)
- An Examination of Network RTK Gps Services in Great Britain: S. J. Edwards, P. J. Clarke, N. T. Penna and S. GoebellDocument16 pagesAn Examination of Network RTK Gps Services in Great Britain: S. J. Edwards, P. J. Clarke, N. T. Penna and S. GoebellBubbleNo ratings yet
- PANDA Software and Its Preliminary Result of Positioning and Orbit DeterminationDocument9 pagesPANDA Software and Its Preliminary Result of Positioning and Orbit DeterminationkiopogmailcomNo ratings yet
- GPS ApplicationsDocument26 pagesGPS ApplicationskrrishNo ratings yet
- Analyzing the Effect of Baseline Length on Measurement Accuracy Using GNSS RTK-NTRIP MethodDocument17 pagesAnalyzing the Effect of Baseline Length on Measurement Accuracy Using GNSS RTK-NTRIP Methodromanz_657710156No ratings yet
- Surveying With GPSDocument19 pagesSurveying With GPSਤਨ੍ਹਾ ਰਾਜੀਵ ਮਾਯੂਸNo ratings yet
- DGPS Surveying InstrumentDocument5 pagesDGPS Surveying InstrumentAnkit kumat100% (1)
- New Approaches in GPS Based Location Systems: Map India 2004Document7 pagesNew Approaches in GPS Based Location Systems: Map India 2004a kNo ratings yet
- Measuring Power Line Sag from GPS DataDocument10 pagesMeasuring Power Line Sag from GPS DataBhaskar Dutta KarmakarNo ratings yet
- Its2013 3195Document11 pagesIts2013 3195Amadou DiakiteNo ratings yet
- Topographical Survey Method Statement: Prepared For: BGC Prepared By: BGC Geomatics Date of Document: 1st April 2021Document4 pagesTopographical Survey Method Statement: Prepared For: BGC Prepared By: BGC Geomatics Date of Document: 1st April 2021Ahmad AltaieNo ratings yet
- 50 DesigningDocument7 pages50 DesigningYoftahiNo ratings yet
- NMEA-0183 Sentences Analysis Tool From The GPS System To Increase The Positional AccuracyDocument8 pagesNMEA-0183 Sentences Analysis Tool From The GPS System To Increase The Positional AccuracyJournal of TelecommunicationsNo ratings yet
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- An Introduction to Spatial Data Analysis: Remote Sensing and GIS with Open Source SoftwareFrom EverandAn Introduction to Spatial Data Analysis: Remote Sensing and GIS with Open Source SoftwareNo ratings yet
- Enroute Chart - Icao: LegendDocument1 pageEnroute Chart - Icao: LegendAgungNo ratings yet
- Doc.9849-EN Global Navigation Satellite System (GNSS) ManualDocument120 pagesDoc.9849-EN Global Navigation Satellite System (GNSS) ManualOmarchNo ratings yet
- MAX-M8 Series Small U-Blox M8 GNSS GPS ModuleDocument30 pagesMAX-M8 Series Small U-Blox M8 GNSS GPS ModulesiogNo ratings yet
- PBN in Egypt: Nansc TeamDocument38 pagesPBN in Egypt: Nansc TeamAhmed AtefNo ratings yet
- RTK 1010 SB - DatasheetDocument20 pagesRTK 1010 SB - Datasheetvis4u90dumNo ratings yet
- HKJKDocument53 pagesHKJKsadjuharNo ratings yet
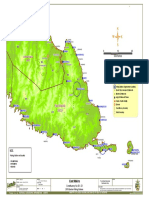
- East Makira Constituency A3Document1 pageEast Makira Constituency A3Andrew EllisonNo ratings yet
- Introduction to Surveying and Spatial Sciences: Unraveling Global Navigation Satellite Systems (GNSSDocument40 pagesIntroduction to Surveying and Spatial Sciences: Unraveling Global Navigation Satellite Systems (GNSS高铭徽No ratings yet
- Ant Info.003Document71 pagesAnt Info.003Hakim FahmiNo ratings yet
- Jeppview For Windows: General Information General InformationDocument16 pagesJeppview For Windows: General Information General InformationSeyi WilliamsNo ratings yet
- Main GPS FinalDocument33 pagesMain GPS FinalVenkata Sai pranavNo ratings yet
- LOWW - Arrival - Transition 34 - 26012023Document5 pagesLOWW - Arrival - Transition 34 - 26012023Rogelio TapieroNo ratings yet
- FKKDDocument41 pagesFKKDYusuf UsmanNo ratings yet
- DGPS Surveying InstrumentDocument5 pagesDGPS Surveying InstrumentAnkit kumat100% (1)
- Gps152 SpecDocument2 pagesGps152 SpecjpurbopNo ratings yet
- Topcon GR 5 Manual: Click Here To DownloadDocument3 pagesTopcon GR 5 Manual: Click Here To DownloadWee GaalánNo ratings yet
- Eighty Fifth IIRS Outreach Programme: On Basic of RS, GIS & GNSSDocument3 pagesEighty Fifth IIRS Outreach Programme: On Basic of RS, GIS & GNSSbalajinadatNo ratings yet
- Sentani Airport Runway and Taxiway ChartDocument1 pageSentani Airport Runway and Taxiway ChartAndy'NgilameleNo ratings yet
- LT Ad 2 Ltac Iac 19 enDocument1 pageLT Ad 2 Ltac Iac 19 enTufan KutluNo ratings yet
- Penjelasan GPS NMEA 0183 Standar Kalimat LaporanDocument4 pagesPenjelasan GPS NMEA 0183 Standar Kalimat LaporanM Ilham ArrizeqoNo ratings yet
- SBFZ Flz-1d-Rwy13 Sid 20160818Document2 pagesSBFZ Flz-1d-Rwy13 Sid 20160818boero115100% (1)
- GPSG 1000 Portable Satellite Simulator Brochure enDocument2 pagesGPSG 1000 Portable Satellite Simulator Brochure enAlex AnishchykNo ratings yet
- Dzexams Docs 3as 903900Document8 pagesDzexams Docs 3as 903900l'Afrique DZNo ratings yet
- RJFU NagasakiDocument29 pagesRJFU NagasakitommyNo ratings yet
- Perbandingan Esurvey-SokkiaDocument2 pagesPerbandingan Esurvey-Sokkiagaga neoNo ratings yet
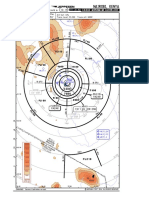
- Moroni Approach Chart for Runway 02 at Prince SAID IBRAHIM AirportDocument1 pageMoroni Approach Chart for Runway 02 at Prince SAID IBRAHIM AirportRicardo Aguilera T.No ratings yet
- International & Domestic ATS RoutesDocument1 pageInternational & Domestic ATS RoutesGazi JayedNo ratings yet
- Evolution of Maritime GNSS and RNSS Performance STDocument28 pagesEvolution of Maritime GNSS and RNSS Performance STAnaNo ratings yet
- LPV Training - PackageDocument118 pagesLPV Training - PackageValerio GuitaroNo ratings yet
- Trimble BX982 Datasheet 0221 LRDocument2 pagesTrimble BX982 Datasheet 0221 LRsebascast77No ratings yet