You might also like
- CNC Machining Handbook: Building, Programming, and ImplementationFrom EverandCNC Machining Handbook: Building, Programming, and ImplementationNo ratings yet
- MSM8916.LA.1.0 Linux Android™ Release 1.0.25 For MSM8916 DevicesDocument42 pagesMSM8916.LA.1.0 Linux Android™ Release 1.0.25 For MSM8916 Devicesburdun777No ratings yet
- Cyclone V Device Handbook Volume 3 Hard Processor System Technical Reference Manual PDFDocument670 pagesCyclone V Device Handbook Volume 3 Hard Processor System Technical Reference Manual PDFMaximiliano NietoNo ratings yet
- MSM8916.LA.1.1 Linux Android™ Release 1.1.32 For MSM8916 DevicesDocument44 pagesMSM8916.LA.1.1 Linux Android™ Release 1.1.32 For MSM8916 Devicesburdun777No ratings yet
- eMBMS Middleware Configuration Parameters: Profile Specification Release 3.2Document42 pageseMBMS Middleware Configuration Parameters: Profile Specification Release 3.2burdun777No ratings yet
- Coreriver Semiconductor Gc49c501g1 Sj20ig 7cd22b693fDocument86 pagesCoreriver Semiconductor Gc49c501g1 Sj20ig 7cd22b693fSpart GorancNo ratings yet
- Netserver e 800Document103 pagesNetserver e 800shyamNo ratings yet
- eMBMS Middleware Provisioning Parameters: Profile Specification Release 3.2Document40 pageseMBMS Middleware Provisioning Parameters: Profile Specification Release 3.2burdun777No ratings yet
- TU0308 Tutorial ARM Cortex-M1 Embedded ProcessorDocument57 pagesTU0308 Tutorial ARM Cortex-M1 Embedded ProcessorJack GoodNo ratings yet
- MPC5676RRMDocument1,581 pagesMPC5676RRMBalraj ParabNo ratings yet
- Oms 1000 K Operator GuideDocument284 pagesOms 1000 K Operator GuideRobertPivacNo ratings yet
- RAID Array 230/plus Subsystem RAID Configuration Utility: User's GuideDocument99 pagesRAID Array 230/plus Subsystem RAID Configuration Utility: User's GuideChristopher AiyapiNo ratings yet
- 3 Phase Ac Induction Motor Control With PFCDocument50 pages3 Phase Ac Induction Motor Control With PFChieuhuech1No ratings yet
- Oracle Database Backup and Recovery Advanced User GuideDocument586 pagesOracle Database Backup and Recovery Advanced User Guideapi-25919427100% (1)
- MOD-15-1825 - V10.14-022 Software Release Note - Issue 1.0Document22 pagesMOD-15-1825 - V10.14-022 Software Release Note - Issue 1.01012268087No ratings yet
- 2012 Qlogic Storage Area Networking Interoperability GuideDocument748 pages2012 Qlogic Storage Area Networking Interoperability GuideRaul RodriguezNo ratings yet
- Performance and Tuning For Oracle WebLogic ServerDocument162 pagesPerformance and Tuning For Oracle WebLogic Serverhelmy_mis1594No ratings yet
- ManualDocument153 pagesManualvicente puentesNo ratings yet
- UniSP AUG3Document268 pagesUniSP AUG3Andrei DanaiataNo ratings yet
- CD E23943 01 Web.1111 E13814 PDFDocument162 pagesCD E23943 01 Web.1111 E13814 PDFErivelto OliveiraNo ratings yet
- Powerflex Drives With Totalforce Control: Programming ManualDocument130 pagesPowerflex Drives With Totalforce Control: Programming Manualabner kaiberNo ratings yet
- Sas3flash quickRefGuide Rev1-0Document28 pagesSas3flash quickRefGuide Rev1-0alexiavgNo ratings yet
- HP Storageworks Msa San Switch 2/8: Installation GuideDocument72 pagesHP Storageworks Msa San Switch 2/8: Installation GuidenetfinityfrNo ratings yet
- Firmware Update User ManualDocument53 pagesFirmware Update User ManualSamdan NamhaisurenNo ratings yet
- Proliant Ml330 Generation 2 Server: Setup and Installation GuideDocument160 pagesProliant Ml330 Generation 2 Server: Setup and Installation Guidejfreddy026864No ratings yet
- LAN - Mellanox OFED Linux User Manual 1 - 5 - 3-1 - 0 - 0Document224 pagesLAN - Mellanox OFED Linux User Manual 1 - 5 - 3-1 - 0 - 0Nanard78No ratings yet
- Secure Web Management (SWM) User Guide: Magnum 6K Family of SwitchesDocument296 pagesSecure Web Management (SWM) User Guide: Magnum 6K Family of SwitchesnaceurmaNo ratings yet
- Planning and Designing Your DeltaV™ Digital Automation Systems and DeltaV™ SIS Process Safety Systems 2015 PDFDocument214 pagesPlanning and Designing Your DeltaV™ Digital Automation Systems and DeltaV™ SIS Process Safety Systems 2015 PDFquocthaimt97No ratings yet
- Fan ModuleDocument414 pagesFan Modulefouad boutatNo ratings yet
- IPS Tempo: User ManualDocument262 pagesIPS Tempo: User ManualdevaseelanNo ratings yet
- Jace8000Startup GuideDocument48 pagesJace8000Startup GuideChris MeinNo ratings yet
- PRM User Manual - enDocument212 pagesPRM User Manual - ensofianigniteNo ratings yet
- VSC7424-02, VSC7425-02, VSC7426-02, and VSC7427-02Document772 pagesVSC7424-02, VSC7425-02, VSC7426-02, and VSC7427-02Hosein movahedian attarNo ratings yet
- Ug0727 User Guide Polarfire Fpga 10G Ethernet SolutionsDocument24 pagesUg0727 User Guide Polarfire Fpga 10G Ethernet SolutionsBrian OnnNo ratings yet
- Oracle TimesTen In-Memory Database C Developer's Guide, Release 18.1Document340 pagesOracle TimesTen In-Memory Database C Developer's Guide, Release 18.1errr33No ratings yet
- Redhawk User Manual: Software Release 15.2Document994 pagesRedhawk User Manual: Software Release 15.2jianan yaoNo ratings yet
- Ipecs Lik: RSGM Installer GuideDocument43 pagesIpecs Lik: RSGM Installer GuideSufianAbukoushNo ratings yet
- Commander SeDocument194 pagesCommander SeHoàng Đức KhảiNo ratings yet
- Onyx Ethernet User Manual For HPE PDFDocument1,595 pagesOnyx Ethernet User Manual For HPE PDFmarlonpatoNo ratings yet
- Hs Windows InstallDocument203 pagesHs Windows InstallSagar Reddy KNo ratings yet
- HP Smart Array P800 Controller For HP Integrity Servers User GuideDocument44 pagesHP Smart Array P800 Controller For HP Integrity Servers User GuidemwajhiNo ratings yet
- Qualcomm Flash Image Loader (QFIL) : User GuideDocument29 pagesQualcomm Flash Image Loader (QFIL) : User GuideSukronfalahNo ratings yet
- BRM 75ps12 Install PDFDocument50 pagesBRM 75ps12 Install PDFAAANo ratings yet
- Quantar RSS ManualDocument318 pagesQuantar RSS ManualGeovane BarbosaNo ratings yet
- Raspberry Pi Easyladder PDFDocument93 pagesRaspberry Pi Easyladder PDFQuốcHưngNo ratings yet
- VIPA System 500S: SPEED7 - CPU - 515-2AJ02 - ManualDocument154 pagesVIPA System 500S: SPEED7 - CPU - 515-2AJ02 - ManualAlberto OsunaNo ratings yet
- Ais Sab27Document4 pagesAis Sab27Christian ReyesNo ratings yet
- Demarc Technology Group: Dt-Rwr-10As-Co3 2.4 GHZ Outdoor Cpe/Ap/Bridge/RouterDocument52 pagesDemarc Technology Group: Dt-Rwr-10As-Co3 2.4 GHZ Outdoor Cpe/Ap/Bridge/RouterAusNo ratings yet
- Reed-Solomon Compiler User GuideDocument40 pagesReed-Solomon Compiler User Guide'Nama Saya Noff'No ratings yet
- Sap Basis Config ServerDocument125 pagesSap Basis Config ServerAESANo ratings yet
- User Manual: 1305 Adjustable Frequency AC Drive (Series C)Document170 pagesUser Manual: 1305 Adjustable Frequency AC Drive (Series C)gmdeucsNo ratings yet
- Guia Desarrollo FPGA LabVIEW PDFDocument94 pagesGuia Desarrollo FPGA LabVIEW PDFBelen CastillonNo ratings yet
- Schneider Unity Pro ManualDocument3 pagesSchneider Unity Pro ManualPaulo UlianNo ratings yet
- 80-n2040-53_aa_prm_v73Document691 pages80-n2040-53_aa_prm_v73meeamitechs20noteNo ratings yet
- Power Flex 525 ManualDocument274 pagesPower Flex 525 ManualAsish Sharma33% (3)
- MX28 EVK Linux Reference ManualDocument134 pagesMX28 EVK Linux Reference ManualaaaNo ratings yet
- User Guide Rtu-2 English - 1072914Document156 pagesUser Guide Rtu-2 English - 1072914Abdulmoied OmarNo ratings yet
- Manual Edimax br-6224nDocument131 pagesManual Edimax br-6224nReca BogdanNo ratings yet
- Cisco CCNA/CCENT Exam 640-802, 640-822, 640-816 Preparation KitFrom EverandCisco CCNA/CCENT Exam 640-802, 640-822, 640-816 Preparation KitRating: 2.5 out of 5 stars2.5/5 (8)
- Qualcomm Snapdragon 600E Processor Apq8064E: Multimediacard/Secure Digital Card Application NoteDocument14 pagesQualcomm Snapdragon 600E Processor Apq8064E: Multimediacard/Secure Digital Card Application Noteburdun777No ratings yet
- MSM8916.LA.1.0 Video Workflow: Confidential and Proprietary - Qualcomm Technologies, IncDocument25 pagesMSM8916.LA.1.0 Video Workflow: Confidential and Proprietary - Qualcomm Technologies, Incburdun777No ratings yet
- Simlock Overview: Confidential and Proprietary - Qualcomm Technologies, IncDocument17 pagesSimlock Overview: Confidential and Proprietary - Qualcomm Technologies, Incburdun777No ratings yet
- Dragonboard™ 410C Based On Qualcomm Snapdragon™ 410 ProcessorDocument9 pagesDragonboard™ 410C Based On Qualcomm Snapdragon™ 410 Processorburdun777No ratings yet
- FR1150 - EFS Item Configuration: Confidential and Proprietary - Qualcomm Technologies, IncDocument11 pagesFR1150 - EFS Item Configuration: Confidential and Proprietary - Qualcomm Technologies, Incburdun777No ratings yet
- Bluetooth v4.1 On Pronto 1.4.1 Overview: Confidential and Proprietary - Qualcomm Technologies, IncDocument41 pagesBluetooth v4.1 On Pronto 1.4.1 Overview: Confidential and Proprietary - Qualcomm Technologies, Incburdun777No ratings yet
- Watchdog and Abnormal Reset Mode: Qualcomm Technologies, IncDocument28 pagesWatchdog and Abnormal Reset Mode: Qualcomm Technologies, Incburdun777No ratings yet
- Select Radioone RF NV Items: Application NoteDocument66 pagesSelect Radioone RF NV Items: Application Noteburdun777No ratings yet
- FR 3624 - Support To Recover From Invalid SIM Caused by Abnormal Network BehaviorDocument16 pagesFR 3624 - Support To Recover From Invalid SIM Caused by Abnormal Network Behaviorburdun777No ratings yet
- Spmi: System Power Management Interface: Presented By: Josh CartwrightDocument30 pagesSpmi: System Power Management Interface: Presented By: Josh Cartwrightburdun777No ratings yet
- MSM8974/MSM8926 DSDS/DSDA RF Software: Confidential and Proprietary - Qualcomm Technologies, IncDocument50 pagesMSM8974/MSM8926 DSDS/DSDA RF Software: Confidential and Proprietary - Qualcomm Technologies, Incburdun777No ratings yet
- MSM8916 Linux USB Overview: Confidential and Proprietary - Qualcomm Technologies, IncDocument25 pagesMSM8916 Linux USB Overview: Confidential and Proprietary - Qualcomm Technologies, Incburdun777No ratings yet
- Snapdragon™ Sensors Core (SSC) Factory Test Framework: Qualcomm Technologies, IncDocument53 pagesSnapdragon™ Sensors Core (SSC) Factory Test Framework: Qualcomm Technologies, Incburdun777No ratings yet
- MSM8939.LA.2.1 Linux Android Release 2.1.34 For MSM8916, MSM8929 and MSM8939 QRD DevicesDocument69 pagesMSM8939.LA.2.1 Linux Android Release 2.1.34 For MSM8916, MSM8929 and MSM8939 QRD Devicesburdun777No ratings yet
- Camera Project Workflow: Confidential and Proprietary - Qualcomm Technologies, Inc. 机密和专有信息 - 高通技术股份有限公司Document41 pagesCamera Project Workflow: Confidential and Proprietary - Qualcomm Technologies, Inc. 机密和专有信息 - 高通技术股份有限公司burdun777No ratings yet
- Dragonboard™ 410C Based On Qualcomm Snapdragon™ 410E ProcessorDocument7 pagesDragonboard™ 410C Based On Qualcomm Snapdragon™ 410E Processorburdun777No ratings yet
- Linux Display Workflow Overview: Confidential and Proprietary - Qualcomm Technologies, IncDocument20 pagesLinux Display Workflow Overview: Confidential and Proprietary - Qualcomm Technologies, Incburdun777No ratings yet
- Dragonboard™ 410C Based On Qualcomm® Snapdragon™ 410E ProcessorDocument8 pagesDragonboard™ 410C Based On Qualcomm® Snapdragon™ 410E Processorburdun777No ratings yet
- MSM7600™ Chipset SolutionDocument4 pagesMSM7600™ Chipset Solutionburdun777No ratings yet
- MSM8916 Thermal Management Overview: Confidential and Proprietary - Qualcomm Technologies, IncDocument22 pagesMSM8916 Thermal Management Overview: Confidential and Proprietary - Qualcomm Technologies, Incburdun777No ratings yet
- Policy Manager Overview: Confidential and Proprietary - Qualcomm Technologies, IncDocument34 pagesPolicy Manager Overview: Confidential and Proprietary - Qualcomm Technologies, Incburdun777No ratings yet
- LTE Mobility Between TDD and FDD Overview: Confidential and Proprietary - Qualcomm Technologies, IncDocument19 pagesLTE Mobility Between TDD and FDD Overview: Confidential and Proprietary - Qualcomm Technologies, Incburdun777No ratings yet
- Wi-Fi Call Overview and Architecture: Qualcomm Technologies, IncDocument25 pagesWi-Fi Call Overview and Architecture: Qualcomm Technologies, Incburdun777No ratings yet
- Dragonboard™ 410C Based On Qualcomm Snapdragon™ 410E ProcessorDocument9 pagesDragonboard™ 410C Based On Qualcomm Snapdragon™ 410E Processorburdun777No ratings yet
- MSM6250 Chipset Solution: PM6650 RGR6200Document8 pagesMSM6250 Chipset Solution: PM6650 RGR6200burdun777No ratings yet
- QMI COEX 1.12 For MPSS - DPM.1.0: QMI Coexistence SVC SpecDocument107 pagesQMI COEX 1.12 For MPSS - DPM.1.0: QMI Coexistence SVC Specburdun777No ratings yet
- Logkit Ii Usage: Confidential and Proprietary - Qualcomm Technologies, IncDocument17 pagesLogkit Ii Usage: Confidential and Proprietary - Qualcomm Technologies, Incburdun777No ratings yet
- MSM8916 Modem/Multimedia Use Case Details: Submit Technical Questions atDocument28 pagesMSM8916 Modem/Multimedia Use Case Details: Submit Technical Questions atburdun777No ratings yet
- Berkowitz Et Al (2010) - Skills For Psychological Recovery - Field Operations GuideDocument154 pagesBerkowitz Et Al (2010) - Skills For Psychological Recovery - Field Operations GuideRita CamiloNo ratings yet
- Haloalkanes and Haloarenes Notes GoodDocument21 pagesHaloalkanes and Haloarenes Notes GoodAnitesh DharamNo ratings yet
- DS-RTCD905 H6W4Document2 pagesDS-RTCD905 H6W4david fonsecaNo ratings yet
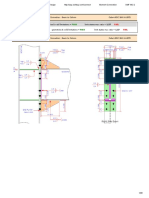
- Result Summary - Overall: Moment Connection - Beam To Column Code AISC 360-16 LRFDDocument29 pagesResult Summary - Overall: Moment Connection - Beam To Column Code AISC 360-16 LRFDYash Suthar100% (2)
- Mercer Role and Job Analysis InfoDocument3 pagesMercer Role and Job Analysis InfojehaniaNo ratings yet
- Mobile Assisted Language Learning (MALL) Describes An Approach To Language LearningDocument7 pagesMobile Assisted Language Learning (MALL) Describes An Approach To Language Learninggusria ningsihNo ratings yet
- 25 Mosquito Facts and TriviaDocument3 pages25 Mosquito Facts and Triviamara_hahaNo ratings yet
- S1.4.5.) Datasheet PRESSURE GAUGEDocument3 pagesS1.4.5.) Datasheet PRESSURE GAUGEEkoNo ratings yet
- AllareDocument16 pagesAllareGyaniNo ratings yet
- 2020 Exam-Sample-Questions-Computer-ScienceDocument8 pages2020 Exam-Sample-Questions-Computer-ScienceNesrine LaradjiNo ratings yet
- AFPRP Final Group 25Document19 pagesAFPRP Final Group 25Pranay NitnawareNo ratings yet
- Leaving Cert Maths ScholarshipsDocument3 pagesLeaving Cert Maths ScholarshipsJohn HayesNo ratings yet
- Asc2104b-T I enDocument21 pagesAsc2104b-T I enELOUNDOU EVARISTE OHANDJANo ratings yet
- Examining The Structural Relationships of Destination Image, Tourist Satisfaction PDFDocument13 pagesExamining The Structural Relationships of Destination Image, Tourist Satisfaction PDFAndreea JecuNo ratings yet
- Living Together TestDocument2 pagesLiving Together TestProfu' de biologieNo ratings yet
- Modigliani MillerDocument12 pagesModigliani MillerAlvaro CamañoNo ratings yet
- Managerial Economics L4 Consumer BehaviourDocument50 pagesManagerial Economics L4 Consumer BehaviourRifat al haque DhruboNo ratings yet
- Pizza Hut Final!Document15 pagesPizza Hut Final!Alisha ParabNo ratings yet
- F2 IS Exam 1 (15-16)Document10 pagesF2 IS Exam 1 (15-16)羅天佑No ratings yet
- Meluha-The Fern Hotel Sustainability ProgramDocument7 pagesMeluha-The Fern Hotel Sustainability Programbushra sayyadNo ratings yet
- DANGEL 4as LESSON PLANNINGDocument2 pagesDANGEL 4as LESSON PLANNINGCarlz BrianNo ratings yet
- SAQ Ans 6Document3 pagesSAQ Ans 6harshanauocNo ratings yet
- Developing Website Information ArchitectureDocument39 pagesDeveloping Website Information ArchitectureBizuNo ratings yet
- Sop For FatDocument6 pagesSop For Fatahmed ismailNo ratings yet
- Accounting For Non Specialists Australian 7th Edition Atrill Test BankDocument26 pagesAccounting For Non Specialists Australian 7th Edition Atrill Test BankJessicaMitchelleokj100% (49)
- IruvarDocument5 pagesIruvarKarthikeya KaredlaNo ratings yet
- New Ss 8 OutlineDocument3 pagesNew Ss 8 Outlineapi-251874206No ratings yet
- 1675.does Concrete Lighten or Change Color As It DriesDocument5 pages1675.does Concrete Lighten or Change Color As It DriestvrNo ratings yet
- 17a03g - Mosfet - DualDocument5 pages17a03g - Mosfet - DualEletronica01 - BLUEVIXNo ratings yet
- Quality Control and Quality AssuranceDocument7 pagesQuality Control and Quality AssuranceMoeen Khan Risaldar100% (1)