You might also like
- Numerical Quantum DynamicsDocument281 pagesNumerical Quantum DynamicsDontu MariaNo ratings yet
- Word2vec, Node2vec, Graph2vec, X2vec - Towards A Theory of Vector Embeddings of Structured Data 2003.12590Document38 pagesWord2vec, Node2vec, Graph2vec, X2vec - Towards A Theory of Vector Embeddings of Structured Data 2003.12590Taolue ChenNo ratings yet
- Practical Bayesian InferenceDocument322 pagesPractical Bayesian InferenceSinisa Hristov100% (1)
- CAA Methods GuideDocument81 pagesCAA Methods Guidend1977No ratings yet
- Machine Learning Techniques AssignmentDocument5 pagesMachine Learning Techniques Assignmentbharti goyalNo ratings yet
- Unit 1 - Data Science & Big Data - WWW - Rgpvnotes.inDocument20 pagesUnit 1 - Data Science & Big Data - WWW - Rgpvnotes.inrajeev kumarNo ratings yet
- Fi LZ Moser 2020Document18 pagesFi LZ Moser 2020Danna Lizeth Cardona HernandezNo ratings yet
- Computer Science and High Dimensional Data ModellingDocument6 pagesComputer Science and High Dimensional Data ModellingIJRASETPublicationsNo ratings yet
- 1008 5374 PDFDocument40 pages1008 5374 PDFNicolás Pérez BarrigaNo ratings yet
- Probability and Non-Probability Samples LMU Munich 2022Document22 pagesProbability and Non-Probability Samples LMU Munich 2022mehboob aliNo ratings yet
- Fuzzy Statistical Database and Its Physical OrganizationDocument21 pagesFuzzy Statistical Database and Its Physical OrganizationMaurice LeeNo ratings yet
- Grafical Data Analysis MethodsDocument14 pagesGrafical Data Analysis MethodsAnonymous RHAid5sNo ratings yet
- Logistic regression knockoffsDocument52 pagesLogistic regression knockoffsvivek thoratNo ratings yet
- Probabilistic Models in Machine Learning: Unit - III Chapter - 1Document18 pagesProbabilistic Models in Machine Learning: Unit - III Chapter - 1AnilNo ratings yet
- The General Considerations and Implementation In: K-Means Clustering Technique: MathematicaDocument10 pagesThe General Considerations and Implementation In: K-Means Clustering Technique: MathematicaMario ZamoraNo ratings yet
- Selecting vantage objects for similarity indexingDocument14 pagesSelecting vantage objects for similarity indexingreinierNo ratings yet
- Research Paper On Clustering TechniquesDocument5 pagesResearch Paper On Clustering Techniquesj1zijefifin3100% (1)
- Model Selection Using Correlation in Comparison With Qq-PlotDocument5 pagesModel Selection Using Correlation in Comparison With Qq-PlotSowmya KoneruNo ratings yet
- Algorithms 17 00120 v2Document16 pagesAlgorithms 17 00120 v2jamel-shamsNo ratings yet
- Information Sciences: Francesco Gullo, Giovanni Ponti, Andrea Tagarelli, Sergio GrecoDocument17 pagesInformation Sciences: Francesco Gullo, Giovanni Ponti, Andrea Tagarelli, Sergio GrecoRaul Arredondo FloresNo ratings yet
- Data Mining With Fuzzy Methods: Status and PerspectivesDocument8 pagesData Mining With Fuzzy Methods: Status and PerspectivesAmit SinghNo ratings yet
- Why Do Tree-Based Models Still Outperform Deep Learning On Tabular Data?Document33 pagesWhy Do Tree-Based Models Still Outperform Deep Learning On Tabular Data?dd dNo ratings yet
- On Topological Data Analysis For SHMDocument18 pagesOn Topological Data Analysis For SHMshahriyarpourakbarsaffarNo ratings yet
- Big Data Techniques and Machine LearningDocument11 pagesBig Data Techniques and Machine LearningdouglasNo ratings yet
- DM Unit 2-5 NotesDocument78 pagesDM Unit 2-5 NotesNandhini RNo ratings yet
- Angelov Et Al. (2016) - Empirical Data Analysis - A New Tool For Data Analyties.Document8 pagesAngelov Et Al. (2016) - Empirical Data Analysis - A New Tool For Data Analyties.Laisa DaianaNo ratings yet
- Clustering Mixed Data Using a Two-Step MethodDocument9 pagesClustering Mixed Data Using a Two-Step Methodaparna_yedlaNo ratings yet
- Tkde 2020 3019488Document14 pagesTkde 2020 3019488王越No ratings yet
- THE ULTRAMETRIC PROPERTIES OF BINARY DATASETS P. WILCZEK Silesian - J - Pure - Appl - Math - v6 - I1 - STR - 069-084Document16 pagesTHE ULTRAMETRIC PROPERTIES OF BINARY DATASETS P. WILCZEK Silesian - J - Pure - Appl - Math - v6 - I1 - STR - 069-084Piotr WilczekNo ratings yet
- Clustering High-Dimensional DataDocument5 pagesClustering High-Dimensional Datajohn949No ratings yet
- Triangular Single Valued Neutrosophic Data Envelopment Analysis: Application To Hospital Performance MeasurementDocument14 pagesTriangular Single Valued Neutrosophic Data Envelopment Analysis: Application To Hospital Performance MeasurementScience DirectNo ratings yet
- Explain Multirelational Data Mining Concept in DetailDocument7 pagesExplain Multirelational Data Mining Concept in Detailanirudh devarajNo ratings yet
- QB 3 UnitDocument8 pagesQB 3 UnitDr. lavanya sambathNo ratings yet
- Unit 3Document77 pagesUnit 3patilamrutak2003No ratings yet
- Srep 01236Document8 pagesSrep 01236Albertas DvirnasNo ratings yet
- A Primer in Nonparametric EconometricsDocument88 pagesA Primer in Nonparametric EconometricsFabian GouretNo ratings yet
- 4977-Article Text-8244-1-10-20190710Document9 pages4977-Article Text-8244-1-10-20190710Mo SaNo ratings yet
- Decision Trees For Handling Uncertain Data To Identify Bank FraudsDocument4 pagesDecision Trees For Handling Uncertain Data To Identify Bank FraudsWARSE JournalsNo ratings yet
- Parallel SamplingDocument17 pagesParallel SamplingSukla SatapatyNo ratings yet
- Glynn 2012 CA Correspondence AnalysisDocument47 pagesGlynn 2012 CA Correspondence AnalysisHolaq Ola OlaNo ratings yet
- Bayesian Modelling With StanDocument24 pagesBayesian Modelling With StanHassan JavedNo ratings yet
- Provable Benefits of Representation Learning: Sanjeev Arora Andrej Risteski June 15, 2017Document22 pagesProvable Benefits of Representation Learning: Sanjeev Arora Andrej Risteski June 15, 2017Ramchandran MuthukumarNo ratings yet
- Multivariate StatisticsDocument6 pagesMultivariate Statisticsbenjamin212No ratings yet
- Development and Application of A Metric On Semantic Nets: S1S1tM3, 17, I, 1707 LiDocument14 pagesDevelopment and Application of A Metric On Semantic Nets: S1S1tM3, 17, I, 1707 Liphyoset thawNo ratings yet
- CHEMOMETRICS and STATISTICS Multivariate Classification Techniques-21-27Document7 pagesCHEMOMETRICS and STATISTICS Multivariate Classification Techniques-21-27Jose GarciaNo ratings yet
- Lect 38 PDF PDFDocument8 pagesLect 38 PDF PDFChander KumarNo ratings yet
- Figure SeerDocument16 pagesFigure SeerRichard OliverNo ratings yet
- Survey of State of The Art Mixed Data Clustering AlgorithmsDocument20 pagesSurvey of State of The Art Mixed Data Clustering AlgorithmsArman DaliriNo ratings yet
- MBA-620 Asad MasoodDocument7 pagesMBA-620 Asad MasoodTECH CENTRALNo ratings yet
- Icai 07Document6 pagesIcai 07seentaNo ratings yet
- Classification of Symbolic Objects Using Adaptive Auto-Configuring RBF Neural NetworksDocument5 pagesClassification of Symbolic Objects Using Adaptive Auto-Configuring RBF Neural NetworksscribdkhatnNo ratings yet
- Neutrosophic Relational Data ModelDocument25 pagesNeutrosophic Relational Data ModelIlieCraciunNo ratings yet
- Unit 333Document18 pagesUnit 333HimajanaiduNo ratings yet
- AGeneralised MethodologyDocument14 pagesAGeneralised MethodologyShaaficiNo ratings yet
- Big Data Internal 2 Answers-1-9Document9 pagesBig Data Internal 2 Answers-1-9TKKNo ratings yet
- Perspectives On System IdentificationDocument17 pagesPerspectives On System Identificationpladott19678No ratings yet
- Clustering ExamplesDocument47 pagesClustering Examplesdawit gebreyohansNo ratings yet
- Data Mining With Rough Set Using Map-ReduceDocument7 pagesData Mining With Rough Set Using Map-ReduceHitesh RaghavNo ratings yet
- Latent Semantic Kernels Improve Text CategorizationDocument27 pagesLatent Semantic Kernels Improve Text CategorizationdarktuaregNo ratings yet
- Mixture Models and ApplicationsFrom EverandMixture Models and ApplicationsNizar BouguilaNo ratings yet
- Algorithms 17 00100Document19 pagesAlgorithms 17 00100jamel-shamsNo ratings yet
- Algorithms 17 00099 v2Document21 pagesAlgorithms 17 00099 v2jamel-shamsNo ratings yet
- Algorithms 17 00101 v2Document20 pagesAlgorithms 17 00101 v2jamel-shamsNo ratings yet
- Crystals 14 00299Document20 pagesCrystals 14 00299jamel-shamsNo ratings yet
- Algorithms 17 00098 v2Document22 pagesAlgorithms 17 00098 v2jamel-shamsNo ratings yet
- Algorithms 17 00111Document12 pagesAlgorithms 17 00111jamel-shamsNo ratings yet
- Algorithms 17 00126Document21 pagesAlgorithms 17 00126jamel-shamsNo ratings yet
- Algorithms 17 00120 v2Document16 pagesAlgorithms 17 00120 v2jamel-shamsNo ratings yet
- Algorithms 17 00097Document21 pagesAlgorithms 17 00097jamel-shamsNo ratings yet
- Biomedicines 12 00692Document15 pagesBiomedicines 12 00692jamel-shamsNo ratings yet
- Algorithms 17 00123Document12 pagesAlgorithms 17 00123jamel-shamsNo ratings yet
- Algorithms 17 00111Document12 pagesAlgorithms 17 00111jamel-shamsNo ratings yet
- Biomedicines 12 00714Document15 pagesBiomedicines 12 00714jamel-shamsNo ratings yet
- Algorithms 17 00128Document13 pagesAlgorithms 17 00128jamel-shamsNo ratings yet
- Biomedicines 12 00671Document11 pagesBiomedicines 12 00671jamel-shamsNo ratings yet
- Biomedicines 12 00677Document13 pagesBiomedicines 12 00677jamel-shamsNo ratings yet
- Algorithms 17 00128Document13 pagesAlgorithms 17 00128jamel-shamsNo ratings yet
- Biomedicines 12 00713Document16 pagesBiomedicines 12 00713jamel-shamsNo ratings yet
- Biomedicines 12 00695Document11 pagesBiomedicines 12 00695jamel-shamsNo ratings yet
- Biomedicines 12 00704 v2Document17 pagesBiomedicines 12 00704 v2jamel-shamsNo ratings yet
- Biomedicines 12 00694Document15 pagesBiomedicines 12 00694jamel-shamsNo ratings yet
- Machines 12 00133Document21 pagesMachines 12 00133jamel-shamsNo ratings yet
- Biomedicines 12 00693Document27 pagesBiomedicines 12 00693jamel-shamsNo ratings yet
- Machines 12 00142Document13 pagesMachines 12 00142jamel-shamsNo ratings yet
- Biomedicines 12 00714Document15 pagesBiomedicines 12 00714jamel-shamsNo ratings yet
- Biomedicines 12 00715Document21 pagesBiomedicines 12 00715jamel-shamsNo ratings yet
- Machines 12 00156Document13 pagesMachines 12 00156jamel-shamsNo ratings yet
- Biomedicines 12 00709Document11 pagesBiomedicines 12 00709jamel-shamsNo ratings yet
- Machines 12 00140Document26 pagesMachines 12 00140jamel-shamsNo ratings yet
- Machines 12 00181Document27 pagesMachines 12 00181jamel-shamsNo ratings yet
- Handwritten Digits Recognition: ECE462 - Multimedia Systems - Project Report University of TorontoDocument16 pagesHandwritten Digits Recognition: ECE462 - Multimedia Systems - Project Report University of TorontofdknkndfNo ratings yet
- Previous Question Papers For Four Year B. Tech II Semester Regular Examinations July - 2012Document22 pagesPrevious Question Papers For Four Year B. Tech II Semester Regular Examinations July - 2012Srinath GadipelliNo ratings yet
- (IJCT-V2I1P13) Author: Mr. Roshan P. Helonde, Prof. M.R. JoshiDocument5 pages(IJCT-V2I1P13) Author: Mr. Roshan P. Helonde, Prof. M.R. JoshiIjctJournalsNo ratings yet
- Practice 13 14 15Document17 pagesPractice 13 14 15Marisnelvys CabrejaNo ratings yet
- Application of component mode synthesis for dynamic analysis of complex structuresDocument8 pagesApplication of component mode synthesis for dynamic analysis of complex structuresaltarzakovNo ratings yet
- WangYC PDFDocument21 pagesWangYC PDFIvicaNo ratings yet
- St. Joseph'S College of Engineering, Chennai-119 St. Joseph'S Institute of Technology, Chennai - 119Document9 pagesSt. Joseph'S College of Engineering, Chennai-119 St. Joseph'S Institute of Technology, Chennai - 119P S Lakshmi KanthanNo ratings yet
- Mathematics (Introduction To Linear Algebra)Document36 pagesMathematics (Introduction To Linear Algebra)shilpajosephNo ratings yet
- r5100204 Mathematical MethodsDocument4 pagesr5100204 Mathematical MethodssivabharathamurthyNo ratings yet
- Kron I G Penney Model ExtendedDocument9 pagesKron I G Penney Model Extendedjose mirandaNo ratings yet
- Phy 302Document114 pagesPhy 302ms20101No ratings yet
- Adaptive FiltersDocument11 pagesAdaptive Filtersridwan_ozcelikNo ratings yet
- PH 203 Quantum Mechanics I - Assignment 4Document5 pagesPH 203 Quantum Mechanics I - Assignment 4NANDEESH KUMAR K MNo ratings yet
- Eigenvalues Fourier SeriesDocument15 pagesEigenvalues Fourier SeriesWerner HeisenbergNo ratings yet
- Lab Experiment-3 Karhunen-Loeve TransformDocument6 pagesLab Experiment-3 Karhunen-Loeve TransformVineeth KumarNo ratings yet
- A Matlab GUI For Use With ISOLA Fortran Codes: Esokos@upatras - GR Jz@karel - Troja.mff - Cuni.czDocument34 pagesA Matlab GUI For Use With ISOLA Fortran Codes: Esokos@upatras - GR Jz@karel - Troja.mff - Cuni.czrahmatun inayahNo ratings yet
- S3CSEHand OutDocument66 pagesS3CSEHand OutHitha MathewNo ratings yet
- Mech - Curriculam - Syllabus - Regulation 2013-2014 OnwardsDocument118 pagesMech - Curriculam - Syllabus - Regulation 2013-2014 OnwardsSiva2sankarNo ratings yet
- Walker 1974Document12 pagesWalker 1974RoberticoZeaNo ratings yet
- Notes On Quantum Mechanics PDFDocument226 pagesNotes On Quantum Mechanics PDFhhjder_bag8995No ratings yet
- Multiplicity of Solutions For The P-Laplacian: International Center For Theoretical Physics TriesteDocument114 pagesMultiplicity of Solutions For The P-Laplacian: International Center For Theoretical Physics TriesteHamilton BuenoNo ratings yet
- Course Outline MAT 125.9 Summer2023Document6 pagesCourse Outline MAT 125.9 Summer2023Rubayet fahimNo ratings yet
- Rotacion de ConicasDocument3 pagesRotacion de ConicasAlbertoAlcaláNo ratings yet
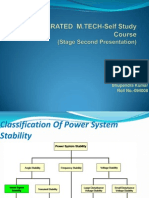
- Bhupendra Kumar Roll No.-094008: Submitted byDocument36 pagesBhupendra Kumar Roll No.-094008: Submitted bytarnedo1No ratings yet
- BSC Hons Maths Syllabus 15oct19Document69 pagesBSC Hons Maths Syllabus 15oct19Sapna KumariNo ratings yet
- Nba Sar MeDocument314 pagesNba Sar MegoldencometNo ratings yet
- Assignment - and - Solutions - Module 1Document5 pagesAssignment - and - Solutions - Module 1sandeep reddieNo ratings yet
- Quantum - Mechanics - A - Graduate - Level - Course Richard FitzpatrickDocument192 pagesQuantum - Mechanics - A - Graduate - Level - Course Richard FitzpatrickYing YueNo ratings yet