0 ratings0% found this document useful (0 votes) 179 views13 pagesReach Tuck Error Codes
Copyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content,
claim it here.
Available Formats
Download as PDF or read online on Scribd
If the intelligent instrument can not receive information from the CAN chain, the
following can be done:
~~ I'the fault occurs with other faults, itis probably the freblem of the CAN
interface of the display. That means the display ean not receive any information from
CAN. It is suggested to check CAN Lines or other circuits to the display.
sil it do not occur other faults, the problem may exists in the CAN
interface of other modules, 7
“SEVICE REQUIRED’
‘The routine maintenance falls due, it needs a thoroughly check and maintain.
“COIL SHORTED”
A short circuit occurs in a toad which connects to the power output (AT9 and,
20). So the relative drivers generate big current the following can be done:
-~.check whether the load is broken or shot circuit or not.
--- check the relative circuit
IF the fault stilt exists when the load connective ire
it is open, it is probably
the broken of the big current protective circuit of the display. Change the instrument
“HYDRAULIC O1
The input of the hydraulie oil lever is effective when starting. The following can
be done #0 resolve the problem
Check whether the relative digital input (A9) of the display is effective. (To
TESER menu). And check the effective (ype of the electric lever of the input point
B or GND) (a SET OPTIONS menut)
f the input point is effective, check the condition of the relative switch,
circuit and oil lever.
~if the input point is ineffective check the input circuit of the intelligent
instrument...
“PUMP MOTOR TEMPERATURE”�9 LOGIC FAILURE#I 70 | HIGH CURRENT
FORW VMN LOW 7 POWER FAILUREAS
FORW VMN HIGH 2 POWER FATLTURER2
[ [ 73. | POWER FAILURE#I
BACK VMN HIGH m4 ‘CURRENT SENS. KO
LEFT VMN LOW 5 CONNECTER DRIVER
5 LEFT VMN HIGH 76 COIL SHORTED
26 RIGHT VMN LOW 7 COIL INTERRUPTED,
2 RIGHT VMN HIGH 78 VACC NOT OK
8 PUMP VMN LOW 1 INCORRECT START
[29 PUMP VMN HIGH 80 FORW*BACK
30 VMNLOW 81 BAD STEER 0-SET
(a VMN HIGH 2 ENCODER ERROR
2 VMN NOTOK 3 BAD ENCODER SIGN
3B NO FULL COND 7 STEER SENSOR KO
M4 _RGTNO FULL COND 35 STEER HAZARO
35__|_LFTNO FULL COND 86 PEDAL WIRE KO
36 PUNO FULL COND 87 PEDAL FAILURE
37 CONNECTOR CLOSED 88 TRACYION BRUSHES
38 “CONNECTOR OPEN 89 PUMP BRUSHE ‘|
39 BRAKE CON. CLOSED _ 90 DRIVER | KO
40 BRAKE CONT. OPEN 31 DRIVER 2 KO
a DIR CONT. OPEN 2 DRIVER 1 SIC. KO
42 | _DIRCONT. CLOSED 3 DRIVER2SIC. KO
[Loa 4 INPUTERROR#6
a 95 INPUT ERRORS
[as | _LeFreonr.cLoseD | 96 INVERTION |
46 | LEFT CONT. OPEN o7_ | POSITIONHANDLE
a7 MAIN CONT. CLOSED | _ 98 INPUT ERROR#2 |
8 MAIN CONT. OPEN %9 INPUTERRORN |
49 __FOLEVER [-
50 LEFT I-0 EVER -
Fault analysis,
EEPROM KO”
Itmeans a fault of parameter storing and adjustment in memory. “EEPROM KO”
means the truck can work on under the set value before selling, If the fault still exists
after restarting the electric lock, replace the instruments: If it disappears, the value set
betiore will be replaced by the one set before selling,
“CAUSE KO’
60�The error oceurs when
5 ous DATA adjusting the parameter of the | Turn the key switch
ACQUISITION | current amplifier of obtaining again
the motor impedance. -
: 85 STEER ‘A warning of the exceeding oF
HAZARD, steering angle
‘A waming that these ofthe
warriyg | CAN BUS is PRESENT; The
2 | a7 data ofthe steering cooler
| DATs is transferred through traction
controller by CAN BUS.
Steering controler works on
ne condition that traction wari
wairinG For |S : me
3 | 239 hone controler sends out the order
of shutting off the safety
switeh,
‘There isa disparity between
the data from the processor's
EPS NOT
4 iagnosis and the set one. Cut
238 | aignen | sismosis and the set one. Cu |
the steering and traction ater 6
seconds |
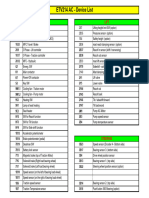
4.6.3.4 Fault code on the intelligent instrument
Code Fault name code | Fault name
wo | NODE SI RIGHT I=0 EVER
oO CHOPPER RUNNING 32 PUMP I=0 EVER
2 NO COMMUNICATION 3 STBY THIGH
@ UNKONWN CHOPPER Sa LEFT STBY 1 HIGH
o4 CONSOLE EEPROM 7 RCG STBY | HIGH _|
05 | SEARIAL ERROR? | PUMP STBY I HIGH
06 RIAL ERRORS HIGH FIELD CUR,
07 | __ CHOPPER NOT CONF 58 NO FIELD CUR,
08 WATCHDOG 39 HIGH BRAKING |
09 FIELD FF FAILURE oo CAPACITOR CHARGE
10 EEPROMDATAKO | 6l HIGH TEMPERATURE
EEPROMPAR.KO | 62 HIGH TEMPERATURE
2 EEPROM CONF. KO 8 THERMIC LEVER
13 EEPROM KO ot PUMPTEMPEATURE |
4 EFPROM OFFLINE 65 MOTOR TEMPERAT.
15 LOGIC FAILURE#S 66 BATTERY LOW
16 LOGIC FAILURE# 67 | _ BATTERY LEVER#2
| 17 | Loci FAILURE#3 | 68 BATTERY LEVER#]
18
LOGIC FAILURE? o | CURRENT SES. KO�SENSOR KO. feedback potential( the truck did not apply to it)
JERKING FB | The output voltage of the | Change feedback digital
7 23
por igital resistor is incorrect, resistor
Check whether the
feedback digital resistor
lose or not; check
whether the steering |
Wheel seizures oF not.
“The output voltage of the check whether the
digital resistor is invariable. | feedback digital resistor
LOCKED exceeds the limit ofthe
electricity when the
steering wheel moving;
‘check the rotation of the
steering motor.
A disparity between the
9 | a1 | STEPER jana compe of | Change hope
va | exconen | Aap ten | ange sod
- ERROR sencoder Irequeney andthe channel of the encoder,
| order frequency
t 13_| EEPROM KO | A failure of EPROM writing | Change the chopper.
7 T iis necessary to adjust eurrent
2a | GAIN | Iris necessary to aut Connect with ZAPI
EEPROM KO | _ ofthe controler |
| CURRENT eis necessary to aust current | a apy
GAIN of the controle.
HIGH The temperature ofthe | Change the way of heat
61 | TEMPERATUR | controller board is higher than | transferring or change
E 155. the controller
‘Check the temperature
TOR |The temperature sensor ofthe
2 os |, Moro he kemperatare sensor or change the
TEMPERATE. | motors higher than 150°
way of heat transferring
‘The current of the current
’ 53. STBYIHIGH ‘Change the chopper
amplifier is high.
‘The voltage of the voltage ]
2 | 32 | VMNNoTOK < Change the chopper
LY OK | amplifiers high,
The voltage amplifier of
ci Vu-Vw exceeds the range of
3 fav) toate es Change the chopper
FAILURES | -0.25V-+0.25V under the
| "|The voltage amplifier of — | -
Locic | vw-Wv exceeds the range of
hange the chopper
4 7 16 | eamrurees | -0.25V-+0.25V under the | hanes the chore
alternate condition,
8�controlier’s positive
POWER ‘The current of the phase V is
“ [7 | ramurees | ov when thematorwors. | Changethe shopper. |
s | | tO | avvotncsenene' | chagetecmper |
r Locie The voltae ofthe phases W ]
+ ag | MAINCONT, eens making the main
OPEN - contactor open circuit in
8 | 2487 | CANBUSKO No communication "ne AN BUS
9 jaan | MOO na |i wtre
oo ‘Check the connection of |
| _ = - 3ohms more o ess) |
| 5 op QLINE The voltage of A,B phases of | especially the resistance
~ SENSOR KO the walking motor is null. between the CAN#9 and
| — 300hms more or less)
3 [zag | SPONTOF | therange ofthe digital resistor fre oie st
4 | nag | PR OUTOF | the range ofthe digital resistor ee
Cheek whether the |
POEITION The feedback digital resistor digital resistor input or
6 sa | STEER AA disparity between the order digital resistor and the |
3�load.
‘No communication between
1 | aan | SECON. | Ae totendcboune | Change cprer
10 251 | KMOPEN hecho by saben Change the chopper
The safe switch inside the -
11 | 254 | KSCLOSED | before receiving the order Choneechoper
- "The safe switch inside the
[an | ksorew | sities 00 | une tgp
| The analogue signal sent by
CLOCK PAL. rinciple processor is error,
28) “Norox | shih ischeckesty | Comet shonre
- sabosinate processor |
‘Check whether the
The current exceeds the motor and the controller
wy | Mot | tscedcurme ae | Moore soot
‘motor starts or works. aster or change the |
a — | cen fi chopper __
Check the fuse; check
5 POWER | The current of the phase W is cooler spose
- Change the chopper.
3 n POWER ‘The current of the phase U is ‘Check the fuse; check
“| FAILURE#2 | _ OV when the motor works. the input of the
56�WARN controller will | and the alarm will
ING send ater signal | disappear
ifthe titing
ro controller
| checks the fault
of iting
chopper.
PUMP Error starting | Exclude the fault)
243 | INC x |x) x corder of the | and the alarm will
START lifting controller | disappear
~f The voltage of
wn | eta
24 | Nor x |x | x higher than the | *™4 he alarm wit
OK set min. voltage | “#PPOH
WV.
4.6.3.3 The fault cade of EPS-ACO inverter
| Glimmer ] Fault | Description in - description The condition |
ing times | code_| the hand manual of excluding the faults
MICRO SLAVE | disparity between the
1) 246 KO controller and the walking and | Change the chopper
| steering motors
A disparity of rotation direction
MICRO | between the steering motor and
2 | 21 | sLaves | the watking motor checked by | Cranes te chopper
controller
The frozen of OXF field data
3 | 250 | MICRO SLAVE of the prineiple and Change the chopper
subordinate miero processor
«Jan | MER | tent penopcand | chert tmp:
SLAVE#S
subordinate processor
| Before the turning off of
the safe switch, the
| voltage ofthe CAN#4 |
‘The vohage of the CAN#A | “lOSE (0 OV whether the
: oo INPUT | higher than 12V before the safe soothes
| ERROR# | switch ise the contotter | eee ech |
| beingoth connected to the
positive point, the
CAN#4 will connect the
negative point through a�LOW disappear
CPOT voltage
higher than the
vec set, number } Exclude the fut |
7s | Nor x 1 volt when | andthe alarm will
OK switches of the disappear
allowance point
INCOR cir macign | EU the al
79 | Rect x an the alarm will
START require order disappear
FORW Both exe | ge an
80 ARD= x ofthe backwand and the alarm will
BACK and forward disappear
WARD input signal
cnc The traction or
ms ling controller | Exclude the fault
ae | x temperature | andthe alarm will
on sensor exceeds | disappear
No Exclude the fault
ast | FOR x Ale ted the alarm wil
NODE Sepiyed in| dapper
4s
contol
want The traction
NG prowess 0" | exclude theft
2st | FoR x tS andthe lar wll
NODE lifting micro disappear
8
rooms
ration
No como 85 | gain a
247 CaN x the connection and the alarm will
Mess withthe ‘en
AGE#S iting
controle,
x contri | Bade he ut
247 CAN x the connection | and the alarm will
MESS
mss withthe iting | disappear
contol
PUMP x _The traction | Exclude the fault�lifting
‘micro-processor
or a disparity
between the
input order and
the main order
A disparity
between the
input state
checked by
INPUT lifting
5 Reclose the
250 | MISM x |x mmicro-processor
ATCH input sae from | eee took
traction
nmiero-processor
through
CANBUS
Exclude the Fault
and the alarm will
The short circuit | disappear ifin the
AUX orbroken way | initializing tate;
253 | ouTP x | x of iFin other states,
UTKO electromagnetic | exclude the Faults
brake coil | and make the
traction require in
farce
The fault oF the
EEPRR Eprom as the | Exclude the fault |
13) OM x |x controller using | and the alarm wil
Ko ating disappear
_ parameter |
Temperature of |
HIGH |
oe x | x retin mtr str ll
ERATU orth met ee pew
RE higher than
75°C
- High
temperature of | Exclude the fault
65 x x either traction or | and the alam will
lifting motor or | disappear
both
66 x lx Battery capacity | Exclude the fault
lower than 20%
and the alarm will�‘main connector
and
electromagnetic
brake; alert state
or working
state: short
circuit of coils,
connector and
electromagnetic
‘and make the
traction require in
force
brake
- Exclude the faults
CONT The
when working;
AcTO un-returning of
a7 | touch point of | Tlose te
electric lock
CLOSE the main vin
D contactor omerting
Exclude the faults
when working:
coNr Poor connect of omnes
ag | ACTO ‘oe reclose the |
Blok a electric lock
oven contactor he
oft-working,
ENco Abnormal ofthe
DER . Reclose the
82 X | motor speed
ERRO electric lock
t sensor (encoder)
PEDAL — Exclude the falls
ac | wine | Thefault of the | and make the
NPOT circuit | traction require in
Ko "
force
WRON disparity | Exclude the faults
ays | OSET between the and make the
OS | Barre battery voltage | traction require in
RY and battery set force
‘A fault of lifting
mmiero-processor
PUMP Reclose the
246 | ko. | checked By | tect lock
traction
_ mmicro-processor
‘A fault of
action Reclose the
nag | MAST x srnctio c
ERKO miero-processor | electric lock
checked by
2�Taso eT
foree
“| ] Exclude the fault
and the alarm will
retuanor | tori the
STBY! feedback circuit inisalizing states
33 HIGH x voltage of the if'in other states,
essa he ate
cients] ue
icon ee
| force
Newest
thovalngs of
tepowsr
cape
thee
CAP being off; the | Exclude the fault
60 | CHAR faults ofthe | and the alarm will
GE power disappear
Ph pnt oft
logic er orth
diving PCB
| Beckie fa
andthe sa
Soper te
DRIVE ‘The short circuit | initializing state:
Pan x Sicmsn | noha
wor cometor cot | exclu ts
and make the
wan ee
force
cont Te akan of hem
| acto thedvng | Excite
as |r x crete
one Be tiie
ore
R connector’s coil -
“I Initializing | Exclude the fault
con se: he woken | and ie al wi
16. | sHoRT x ofthe driving | disappear if in the
ros postion | ian ste
L cle he�4.6.3.2 Fault code of the COMBIA AC2 inverter
The states ofthe
controller
coa | eau | = = The condition
aul Traci © | the | TM | description | of excluding the
e | name | on ina work
alert faults
S| sate | "8
state state
| Exclude the ful
andthe alarm wil
disappear iin the
ware | intalizing sate
are The failure of| we ses
8 | HDOG | x Xx fx | Tee | tin other sates,
we watch JOB | sctude the faults
and make the
traction require in
forve
elude the faults
Fait Oren atc
iy | TAU x protection ofthe | Smt meke the
RERS tration requie in
hardware ciruit
| force
The fault ofthe | Exclude the faults
ws lout | x x feedback circuit | and make the
oF U.V,W phase | tration require in
UREW
voltage force |
Loaie
wer voltage or | Reclose the
19 | FAW | x x |x |x oe vole ; el ‘
bac short of voltge | electric loc
Exclude the fault
‘The fault ofthe | and the alarm will
output of motor | disappear iin the |
| wer the fault | inializing stat:
vMN | powes ©
30 x X | x | xX | ofpower | ifinotherstates.
Low
assessment, oF | exclude the faults
MOS driving | and make the
cireuit or motor | traction require in |
force
The fault ofthe | Exelude the fault
output of motor | andthe alarm will
power; the faut | disappear iin the |
vn power the fut | sppea iin ihe |
a x x | x of power | initializing state:
HIGH :
assessment, ot | ifn other stats,
MOS driving | exclude the faults
LL circuit or motor |_and make the�2) Use notice:
© Auto liquid replenishment shall be carried out at the end of charging, and it is
strictly prohibited to be done before charging,
@The auto liquid replenishment device shall ensure the correct liquid pressure.
@ Liquid storage devices and pipelines shall be kept clean and there shall be no dirt.
@ only special liquid for batteries shall be used.
its strictly forbidden to flush the injection plug with tap water,
@ Pay attention to the temperature to prevent the auto liquid replenishment system
from freezing
4.6.2.6 Panel switch
Switches on the panel can be on or off according to the customer's choose.
If the button is pressed, the speed of the whole truck will slow down.
©) © = irihe two buttons are pressed at the same time, the steering wheel
will center automatically.
4.6.3 Diagnosis
4.6.3.| General instruction
The traction control system, loading control system, steering control system and
clligent instrument system assembled in the truck are continually monitoring
micro-processor controller. They all have a diagnosis program to a main function, The
program includes the following point:
(1) diagnosis when the eleetrie lock being off: the circuit of the watching dog,
current censor, charging of the capacity, phase voltage, driving of the connector,
can-bus connector, the order of the switch operation, the output of the acceleration,
the synchronism of the two micro-processor, the input of the hardware that having
something to do with the safety.
(2) The alternate check; The circuit of the watch dog, phase voltage, current
censor, driving of the connector, can-bus connector
(3) Check when working: the circuit of the watch dog, the driving of the
connector, the current sensor, can-bus connector
(4) Continuously check: inverter temperature, motor temperature
Ways of diagnosis: the digital hand manual which can supply detailed diagnosis
information; the can-bus which will send fault code and the code and module node
will display in the meter
”