You might also like
- Impulse N MomentumDocument11 pagesImpulse N MomentumMohammed Aftab AhmedNo ratings yet
- Dynamics - Lecture TwoDocument22 pagesDynamics - Lecture TwoKassimNo ratings yet
- F DP DT DP FDTDocument3 pagesF DP DT DP FDTKlucifer XinNo ratings yet
- Newton's Laws of Motion and Force InteractionsDocument29 pagesNewton's Laws of Motion and Force InteractionsMehwish IsrarNo ratings yet
- Module 3Document10 pagesModule 3Benson MataNo ratings yet
- Physics Chapter VIIDocument15 pagesPhysics Chapter VIIHime AoiNo ratings yet
- Session OutcomesDocument28 pagesSession OutcomesrajeswariNo ratings yet
- Impulse Momentum AnalysisDocument56 pagesImpulse Momentum Analysisiwhy_No ratings yet
- Direct Central Impacts And Coefficient Of RestitutionDocument17 pagesDirect Central Impacts And Coefficient Of RestitutionJerry LedesmaNo ratings yet
- Introduction To MechanismsDocument7 pagesIntroduction To MechanismsAkash SoniNo ratings yet
- Module 2 DynamicsDocument47 pagesModule 2 DynamicsTaha Kafil-HussainNo ratings yet
- Lesson 1: Fundamental Concepts of MechanicsDocument23 pagesLesson 1: Fundamental Concepts of MechanicsArexcin Ray C. TimbalNo ratings yet
- NoessDocument7 pagesNoessarpita9619080670No ratings yet
- Module 2 Kinetics of A Particle-Force and AccelerationDocument72 pagesModule 2 Kinetics of A Particle-Force and AccelerationHuy VũNo ratings yet
- Laws of Motion MKDocument26 pagesLaws of Motion MKriddhiarunkarangaleNo ratings yet
- Work, Power & EnergyDocument16 pagesWork, Power & EnergyAyush GamerNo ratings yet
- CH 15Document34 pagesCH 15Abdallah OdeibatNo ratings yet
- Week 7Document32 pagesWeek 7christinereponte160No ratings yet
- Feynman Physics Lectures V1 Ch13 1961-11-10 Work and Potential EnergyDocument9 pagesFeynman Physics Lectures V1 Ch13 1961-11-10 Work and Potential Energysquirrel1969No ratings yet
- Using Newton's Laws: ExercisesDocument20 pagesUsing Newton's Laws: ExercisessnglwshtNo ratings yet
- Engineering Mechanics Lectures 1&2: Review Laws of Motion, Vector AlgebraDocument14 pagesEngineering Mechanics Lectures 1&2: Review Laws of Motion, Vector AlgebraSathiyaseelan SubramaniNo ratings yet
- Unit 1.1Document6 pagesUnit 1.1LGG MATRICULATIONNo ratings yet
- 大连学校物理动量知识Document33 pages大连学校物理动量知识leoNo ratings yet
- Lecture 15 & 16 Work and EnergyDocument12 pagesLecture 15 & 16 Work and Energyrizal123No ratings yet
- 핵심물리학 5장Document20 pages핵심물리학 5장승윤No ratings yet
- Theory of MachinesDocument69 pagesTheory of MachinesAnil Lodwal100% (1)
- NddvjiyfgnkDocument7 pagesNddvjiyfgnkClyde QuitorasNo ratings yet
- Uniformly Accelerated Motion in Vertical DimentaionDocument11 pagesUniformly Accelerated Motion in Vertical DimentaionEricka Pallon CamayudoNo ratings yet
- Particle Kinetics Force, Mass and AccelerationDocument7 pagesParticle Kinetics Force, Mass and AccelerationJeric Ryan GalanNo ratings yet
- Chapter 3 Special Applications ImpactDocument6 pagesChapter 3 Special Applications ImpactYilikal passNo ratings yet
- Lecture 5 - FBDsDocument24 pagesLecture 5 - FBDsjunedrkaziNo ratings yet
- Engg. MechanicsDocument29 pagesEngg. MechanicsSunand Pongurlekar100% (1)
- MODULE 3. Kinetics of ParticlesDocument40 pagesMODULE 3. Kinetics of ParticlesAron H OcampoNo ratings yet
- Scalar and vector quantities, equations of motion, and Newton's lawsDocument7 pagesScalar and vector quantities, equations of motion, and Newton's lawsApollo Wong100% (1)
- ملف جديدDocument12 pagesملف جديدalidrawing427No ratings yet
- Physics Notes Zahid I. B. Khan: EchanicsDocument6 pagesPhysics Notes Zahid I. B. Khan: EchanicsZahid IbkNo ratings yet
- Chapter 6 - Momentum and CollisionsDocument59 pagesChapter 6 - Momentum and CollisionsAchiri TangeNo ratings yet
- Scalar and vector quantities identificationDocument9 pagesScalar and vector quantities identificationziezayenNo ratings yet
- Forces and Motion: L L L LDocument8 pagesForces and Motion: L L L LeibsourceNo ratings yet
- A2 Physics: Unit 4 Unit 5Document37 pagesA2 Physics: Unit 4 Unit 5Muhammad Shafnoon KabirNo ratings yet
- CHAPTER 3 Linear Impulse and Linear MomentumDocument5 pagesCHAPTER 3 Linear Impulse and Linear MomentumYilikal passNo ratings yet
- DynamicsDocument26 pagesDynamicschimdesa TolesaNo ratings yet
- Force and Motion - 1: 5.1. Newtons First LawDocument16 pagesForce and Motion - 1: 5.1. Newtons First Laweka123No ratings yet
- Raider 150 CarbDocument18 pagesRaider 150 CarbDavid JolandNo ratings yet
- Chapter 1 - Force Systems - Part ADocument14 pagesChapter 1 - Force Systems - Part ACheong JkNo ratings yet
- Kinetics - Force & Acceleration Part 1Document25 pagesKinetics - Force & Acceleration Part 1Jihan GorayahNo ratings yet
- Conservation of Momentum CalculationsDocument14 pagesConservation of Momentum CalculationsDaniel BerryNo ratings yet
- Convert MefsDocument3 pagesConvert MefssaghfadNo ratings yet
- Topic 2: Mechanics: 2.1 - Motion Distance and DisplacementDocument18 pagesTopic 2: Mechanics: 2.1 - Motion Distance and DisplacementMona Mohamed SafwatNo ratings yet
- Conservation of MomentumDocument4 pagesConservation of MomentumShashank ShettyNo ratings yet
- Unit IDocument10 pagesUnit ISri RNo ratings yet
- Linear Mechanics: Motion in A LineDocument19 pagesLinear Mechanics: Motion in A LineDilla DefayanaNo ratings yet
- Forces Lab Investigates Elastic and Gravitational RelationshipsDocument14 pagesForces Lab Investigates Elastic and Gravitational RelationshipsJustin PedrozaNo ratings yet
- Linear Impulse and Momentum PrinciplesDocument17 pagesLinear Impulse and Momentum PrinciplesVinot EsanNo ratings yet
- Mathematical Solution Unifying the Four Fundamental Forces in NatureFrom EverandMathematical Solution Unifying the Four Fundamental Forces in NatureNo ratings yet
- Es 103 - Module 2 - Thin Walled Pressure Vessels 2bDocument24 pagesEs 103 - Module 2 - Thin Walled Pressure Vessels 2byrbbwababa05No ratings yet
- Es 103 - Module 7 - Torsion of Thin Walled Tubes - Helical SpringDocument36 pagesEs 103 - Module 7 - Torsion of Thin Walled Tubes - Helical Springyrbbwababa05No ratings yet
- Module 7 - Universal Testing MachineDocument6 pagesModule 7 - Universal Testing Machineyrbbwababa05No ratings yet
- Lecture 7 - Noli Me TangereDocument27 pagesLecture 7 - Noli Me Tangereyrbbwababa05No ratings yet
- Lecture 8 - El FilibusterismoDocument29 pagesLecture 8 - El Filibusterismoyrbbwababa05No ratings yet
- Lecture 11 - The Symbolic RizalDocument23 pagesLecture 11 - The Symbolic Rizalyrbbwababa05No ratings yet
- Lecture 10 - Letters From The SoulDocument28 pagesLecture 10 - Letters From The Soulyrbbwababa05No ratings yet
- Linear Momentum and CollisionsDocument2 pagesLinear Momentum and CollisionsAlex HuynhNo ratings yet
- Manual de Uso de Chute MavenDocument33 pagesManual de Uso de Chute MavenMiguel FarahNo ratings yet
- Lecture 5 - Particulate Flows - Advanced Multiphase CourseDocument93 pagesLecture 5 - Particulate Flows - Advanced Multiphase CourseVinicius Mastelaro Rodrigues100% (2)
- Collision of Elastic BodiesDocument10 pagesCollision of Elastic BodiesVinay HaridasNo ratings yet
- Best Practice Manual For Road Accident Reconstruction: Enfsi-Bpm-Raa-01Document24 pagesBest Practice Manual For Road Accident Reconstruction: Enfsi-Bpm-Raa-01Daniel Josue CuberoNo ratings yet
- Physics Study PacketDocument97 pagesPhysics Study PacketArnoNo ratings yet
- Pisiks 71 Prob SetsDocument8 pagesPisiks 71 Prob SetsAndroNo ratings yet
- FIITJEE – (JEE-Advanced) PHYSICS, CHEMISTRY & MATHEMATICS TEST - 4Document11 pagesFIITJEE – (JEE-Advanced) PHYSICS, CHEMISTRY & MATHEMATICS TEST - 4Samarth AggarwalNo ratings yet
- Particle Dynamics (QB)Document38 pagesParticle Dynamics (QB)dymeowkyNo ratings yet
- Further Mechanics 1:: Elastic Collisions in Two DimensionsDocument28 pagesFurther Mechanics 1:: Elastic Collisions in Two DimensionsJezzaNo ratings yet
- Multiple choice questions on work, energy and simple harmonic motionDocument5 pagesMultiple choice questions on work, energy and simple harmonic motionkhiNo ratings yet
- Solution Report 155Document74 pagesSolution Report 155Aryan GuptaNo ratings yet
- Module 4-Mechanics: CollisionsDocument32 pagesModule 4-Mechanics: CollisionsHead LightNo ratings yet
- Gate Question Papers MechanicalDocument26 pagesGate Question Papers MechanicalRohu PaliwalNo ratings yet
- Physics For Engineers: Danielle Joy L. AlcantaraDocument30 pagesPhysics For Engineers: Danielle Joy L. AlcantaraKarren ManaloNo ratings yet
- American Journal PhysicsDocument9 pagesAmerican Journal PhysicsPutri Syahreni HarahapNo ratings yet
- DEM Technical Manual 4.2Document64 pagesDEM Technical Manual 4.2Crizz Ruiz SepulvedaNo ratings yet
- Ariosn A'level PhysicsDocument60 pagesAriosn A'level PhysicsFELECIAN AMOSNo ratings yet
- Effect of Moisture Content On Some Engineering Properties of African Mahogany (Afzelia Africana) SeedDocument20 pagesEffect of Moisture Content On Some Engineering Properties of African Mahogany (Afzelia Africana) SeedAZOJETE UNIMAIDNo ratings yet
- 9231 Scheme of Work Paper 3 (For Examination From 2020)Document25 pages9231 Scheme of Work Paper 3 (For Examination From 2020)Arash RastiNo ratings yet
- Physics HomeworkDocument7 pagesPhysics Homeworkjnrvin50% (2)
- More Than 420 Solved Past Questions Explanations On How To Tackle Problems Methods Used in Approaching Difficult ProblemsDocument75 pagesMore Than 420 Solved Past Questions Explanations On How To Tackle Problems Methods Used in Approaching Difficult ProblemsUchenna DavidNo ratings yet
- A Numerical Investigation of Solid Particle Erosion Experienced Within Oilfield Control ValvesDocument10 pagesA Numerical Investigation of Solid Particle Erosion Experienced Within Oilfield Control Valvesjose trianaNo ratings yet
- Physics 1 Momentum ModuleDocument10 pagesPhysics 1 Momentum ModulejohnNo ratings yet
- Physics q1 w8Document5 pagesPhysics q1 w8malsNo ratings yet
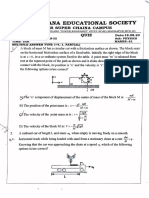
- Narayana Educational Society: Star Super Chaina Campus QuizDocument6 pagesNarayana Educational Society: Star Super Chaina Campus QuizAkshith IsolaNo ratings yet
- Biomechanical Characteristics and Determinants of Instep Soccer KickDocument12 pagesBiomechanical Characteristics and Determinants of Instep Soccer KickM.AhsanNo ratings yet
- AP Physics C: Mechanics Practice Test 1Document17 pagesAP Physics C: Mechanics Practice Test 1张书No ratings yet
- ME2151 - Engineering MechanicsDocument46 pagesME2151 - Engineering MechanicsJ R Vinod KumaarNo ratings yet
- Example Sheet 2 QuestionsDocument2 pagesExample Sheet 2 QuestionsTrevor LewisNo ratings yet