You might also like
- As-Nz 1170.2.2002 - WindloadDocument24 pagesAs-Nz 1170.2.2002 - WindloadQuang Hoành Lê100% (1)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 3.5 out of 5 stars3.5/5 (3)
- Maximum Power Point Tracking - National InstrumentsDocument7 pagesMaximum Power Point Tracking - National Instrumentsrosy01710No ratings yet
- Hill Climbing TechniquesDocument10 pagesHill Climbing TechniquesfarheenNo ratings yet
- NI Tutorial 8106 enDocument4 pagesNI Tutorial 8106 enDadang AntonNo ratings yet
- Analog Control Algorithm For Maximum Power Trackers Employed in Photovoltaic ApplicationsDocument6 pagesAnalog Control Algorithm For Maximum Power Trackers Employed in Photovoltaic Applicationstinhmaixatoi2006No ratings yet
- WSE U6 AnswersDocument3 pagesWSE U6 AnswersOMKAR PATILNo ratings yet
- MPPT of PV Module by Conventional Methods 5.1 Perturb and Observe MethodDocument21 pagesMPPT of PV Module by Conventional Methods 5.1 Perturb and Observe MethodGavril GiurgiNo ratings yet
- 2 Hill ClimbingDocument6 pages2 Hill ClimbingBillel MadridiNo ratings yet
- Maximum Power Point Tracking AlgorithmsDocument8 pagesMaximum Power Point Tracking AlgorithmsVICTOR UCHENo ratings yet
- Solar MPPTDocument16 pagesSolar MPPTKiran ZoroNo ratings yet
- Practical Guide MPPTDocument16 pagesPractical Guide MPPTgubiliNo ratings yet
- A Modified Perturb and Observe Algorithm For Maximum Power Point Tracking of Photovoltaic System Using Buck-Boost ConverterDocument19 pagesA Modified Perturb and Observe Algorithm For Maximum Power Point Tracking of Photovoltaic System Using Buck-Boost ConverterDrAdel A. ElbasetNo ratings yet
- The Modified Control Method For The Single-Stage Three-Phase Grid-Connected Photovoltaic SystemDocument14 pagesThe Modified Control Method For The Single-Stage Three-Phase Grid-Connected Photovoltaic SystemNguyễn Tiến DũngNo ratings yet
- Enhanced Solar PV MPPT System For 12V Battery ChargerDocument8 pagesEnhanced Solar PV MPPT System For 12V Battery ChargerAliXmetecNo ratings yet
- 10 - New MPPT Algorithm Based On PIC Microcontroller - 2016Document15 pages10 - New MPPT Algorithm Based On PIC Microcontroller - 2016Ammar Al-KindyNo ratings yet
- Design and Implementation of PhotovoltaicDocument8 pagesDesign and Implementation of Photovoltaicrostamedastan65No ratings yet
- Design of Charge Controller Using MPPT ADocument8 pagesDesign of Charge Controller Using MPPT Asbv1986No ratings yet
- Boost Converter Simulation Using PSIMDocument5 pagesBoost Converter Simulation Using PSIMnawzatNo ratings yet
- Improved MPPT Converter With Current Compensation Method For Small Scaled PV-ApplicationsDocument6 pagesImproved MPPT Converter With Current Compensation Method For Small Scaled PV-ApplicationsAnonymous PzbYdcEzNo ratings yet
- PV MPPT PoDocument26 pagesPV MPPT PoBaidyanath JenaNo ratings yet
- Lab 07 UpdatedDocument13 pagesLab 07 Updatedasifa rafiqNo ratings yet
- MPPT SoftDocument42 pagesMPPT Softsonalika.geetasureshNo ratings yet
- A Single-Stage Three-Phase Grid-Connected Photovoltaic System With Modified MPPT Method and Reactive Power CompensationDocument6 pagesA Single-Stage Three-Phase Grid-Connected Photovoltaic System With Modified MPPT Method and Reactive Power Compensationsandeepbabu28No ratings yet
- Matlab/Simulink-Based Research On Maximum Power Point Tracking of Photovoltaic GenerationDocument9 pagesMatlab/Simulink-Based Research On Maximum Power Point Tracking of Photovoltaic GenerationOnselwojoud MouniNo ratings yet
- Complex Engineering Problem: Alternate Energy System (EE-412)Document19 pagesComplex Engineering Problem: Alternate Energy System (EE-412)Asad MumtazNo ratings yet
- Designing of Solar PV Systems and Demonstration of Maximum Power Point Tracking (MPPT) Using MatlabDocument17 pagesDesigning of Solar PV Systems and Demonstration of Maximum Power Point Tracking (MPPT) Using MatlabRasapalli DivyaNo ratings yet
- Applied Energy: Jubaer Ahmed, Zainal SalamDocument12 pagesApplied Energy: Jubaer Ahmed, Zainal SalamAbdullrahman Al-ShammaaNo ratings yet
- Design and Implementation of Photo Voltaic System With Soft Switched Boost Converter Using Analog Fuzzy Based MPPTDocument7 pagesDesign and Implementation of Photo Voltaic System With Soft Switched Boost Converter Using Analog Fuzzy Based MPPTskrtamilNo ratings yet
- Maximum Power Point Tracking (MPPT) Controlling AlgorithmsDocument12 pagesMaximum Power Point Tracking (MPPT) Controlling Algorithmsrubon khanNo ratings yet
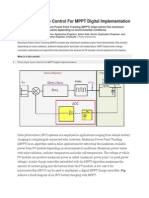
- Direct Duty Cycle Control For MPPT Digital ImplementationDocument5 pagesDirect Duty Cycle Control For MPPT Digital ImplementationPhạm Văn TưởngNo ratings yet
- Ex 4Document3 pagesEx 420EUEE034 JEEVA.SNo ratings yet
- MPPT TestingDocument6 pagesMPPT TestingVICTOR UCHENo ratings yet
- Design OF BUCK BOOST CONVERTERDocument11 pagesDesign OF BUCK BOOST CONVERTERmithunprayagNo ratings yet
- Comparative Analysis of MPPT Techniques ForDocument6 pagesComparative Analysis of MPPT Techniques ForPIT_No ratings yet
- The Maximum Power Point Tracking For Stand-Alone Photovoltaic System Using Current Based Approach IEECON.2017.8075745Document4 pagesThe Maximum Power Point Tracking For Stand-Alone Photovoltaic System Using Current Based Approach IEECON.2017.8075745SijoypJose VelurNo ratings yet
- Adaptive Distributed MPPT Algorithm For Photovoltaic SystemsDocument6 pagesAdaptive Distributed MPPT Algorithm For Photovoltaic SystemsRachna VermaNo ratings yet
- Design of Photovoltaic System Using Buck-Boost Converter Based On MPPT With PID ControllerDocument9 pagesDesign of Photovoltaic System Using Buck-Boost Converter Based On MPPT With PID ControllerL CHNo ratings yet
- Application of PI and MPPT Controller To DC-DC ConDocument9 pagesApplication of PI and MPPT Controller To DC-DC ConwafaNo ratings yet
- T-S Fuzzy Model Based Maximum Power Point Tracking Control of Photovoltaic SystemDocument8 pagesT-S Fuzzy Model Based Maximum Power Point Tracking Control of Photovoltaic SystemAdvika SharmaNo ratings yet
- Maximum Power Point TechniquesDocument7 pagesMaximum Power Point TechniquesHyma GelliNo ratings yet
- Variable Perturbation Size Adaptive P&O MPPT Algorithm For Sudden Changes in IrradianceDocument11 pagesVariable Perturbation Size Adaptive P&O MPPT Algorithm For Sudden Changes in IrradianceRoberto Alejandro Patiño HaroNo ratings yet
- The State of The Art of Maximum Power FinalDocument24 pagesThe State of The Art of Maximum Power FinalADEL OUBNo ratings yet
- Town Planning1Document25 pagesTown Planning1Pravat SatpathyNo ratings yet
- Design and Implementation of Maximum Power Point Tracking (MPPT) Algorithm For A Standalone PV SystemDocument1 pageDesign and Implementation of Maximum Power Point Tracking (MPPT) Algorithm For A Standalone PV SystemShashi ShekharNo ratings yet
- Adjustable Matched Virtual: Photovoltaic PointDocument5 pagesAdjustable Matched Virtual: Photovoltaic PointChenchu TnvNo ratings yet
- Maximum Power Point TrackingDocument5 pagesMaximum Power Point TrackingfjhgfiuyufyjNo ratings yet
- A Novel Approach On MPPT Algorithm For Solar Panel Using Buck Boost ConverterDocument5 pagesA Novel Approach On MPPT Algorithm For Solar Panel Using Buck Boost Converterayoub reseauNo ratings yet
- Impact of Partial Shading On The Output Power of PV Systems Under Partial Shading ConditionsDocument10 pagesImpact of Partial Shading On The Output Power of PV Systems Under Partial Shading Conditionsshihab4806No ratings yet
- Basics of Maximum Power Point Tracking (MPPT) Solar Charge ControllerDocument4 pagesBasics of Maximum Power Point Tracking (MPPT) Solar Charge ControllerRabindra SinghNo ratings yet
- Final Project (Title)Document9 pagesFinal Project (Title)Atluri sai Abhishek ReddyNo ratings yet
- Synopsis MPPT Using ArduinoDocument5 pagesSynopsis MPPT Using ArduinoSunnySinghNo ratings yet
- Implement Maximum Power Point Tracking Algorithms For Photovoltaic Systems Using MATLAB and SimulinkDocument7 pagesImplement Maximum Power Point Tracking Algorithms For Photovoltaic Systems Using MATLAB and Simulinkpooja chirdeNo ratings yet
- MPPT Under Partial Shading Conditions Based On Perturb & Observe and Incremental ConductanceDocument6 pagesMPPT Under Partial Shading Conditions Based On Perturb & Observe and Incremental ConductancehouriaNo ratings yet
- Fuzzy Control Based Solar Tracker Using Arduino Uno: ISO 9001:2008 CertifiedDocument9 pagesFuzzy Control Based Solar Tracker Using Arduino Uno: ISO 9001:2008 CertifiedDavidleonardo GalindoNo ratings yet
- An Eload Can Be Adjusted To Control The Amount of Power It Is Sinking. Eloads Can Measure The Voltage DropDocument8 pagesAn Eload Can Be Adjusted To Control The Amount of Power It Is Sinking. Eloads Can Measure The Voltage DropatulmtNo ratings yet
- V/F Speed Control of SVPWM Based Solar Fed Induction MotorDocument7 pagesV/F Speed Control of SVPWM Based Solar Fed Induction MotorInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Optimization of MPPT Step Si in Stand-Alone Solar Pumping SystemsDocument6 pagesOptimization of MPPT Step Si in Stand-Alone Solar Pumping SystemssunitharajababuNo ratings yet
- PV MPPTDocument5 pagesPV MPPTSajid AkhterNo ratings yet
- The Modified Control Method For The Single-Stage Three-Phase Grid-Connected Photovoltaic SystemDocument14 pagesThe Modified Control Method For The Single-Stage Three-Phase Grid-Connected Photovoltaic SystemHà Văn ĐạtNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Ful Bridge InverterDocument3 pagesFul Bridge InverteramericanyoyonarutoNo ratings yet
- MPPTDocument4 pagesMPPTamericanyoyonarutoNo ratings yet
- Hemanth CVDocument2 pagesHemanth CVamericanyoyonarutoNo ratings yet
- SEO Simplified MasterClass Certificate - IIDEDocument1 pageSEO Simplified MasterClass Certificate - IIDEamericanyoyonarutoNo ratings yet
- Lecture Planner - Inorganic Chemistry - Prayas JEE 2.0 2024Document1 pageLecture Planner - Inorganic Chemistry - Prayas JEE 2.0 2024Ankit MatthNo ratings yet
- Bergen Burnout Inventory - Indhealth 52 102Document12 pagesBergen Burnout Inventory - Indhealth 52 102piyush kumarNo ratings yet
- Ant-Atd4516r7 Datasheet (3.5g 8t8r)Document3 pagesAnt-Atd4516r7 Datasheet (3.5g 8t8r)dchardwareNo ratings yet
- WRE201-Fluid - Chapter 4 - Part 2Document8 pagesWRE201-Fluid - Chapter 4 - Part 2Mahin MobarratNo ratings yet
- Progress in Natural Laminar Flow Wing DesignDocument15 pagesProgress in Natural Laminar Flow Wing Designjunjie yiNo ratings yet
- Gujarat Technological University: M.E. Semester: III Civil (Transportation Engineering)Document2 pagesGujarat Technological University: M.E. Semester: III Civil (Transportation Engineering)kamalNo ratings yet
- The Variety of MapsDocument3 pagesThe Variety of Mapsapi-554375952No ratings yet
- Caliper & Temperature Logging PDFDocument23 pagesCaliper & Temperature Logging PDFsdb158No ratings yet
- Java Project ProgramsDocument53 pagesJava Project ProgramsArihant KumarNo ratings yet
- Carbon-Coated SiO2 Nanoparticles As Anode Material For Lithium Ion BatteriesDocument4 pagesCarbon-Coated SiO2 Nanoparticles As Anode Material For Lithium Ion BatteriesMeruyert KarimNo ratings yet
- Performance Comparison of AODV, AODV-ETX and Modified AODV-ETXDocument8 pagesPerformance Comparison of AODV, AODV-ETX and Modified AODV-ETXHasan MufticNo ratings yet
- Simplified Way of Processing Large Data Using Chunk in LaravelDocument4 pagesSimplified Way of Processing Large Data Using Chunk in LaravelDinesh SutharNo ratings yet
- Dbms Lab Plan 2022-23-SeDocument6 pagesDbms Lab Plan 2022-23-Se41 Aanchal dayaramaniNo ratings yet
- General Controls: (Acc 401B - Auditing EDP Environment)Document9 pagesGeneral Controls: (Acc 401B - Auditing EDP Environment)Pines MacapagalNo ratings yet
- Lesson 10 AssessmentDocument38 pagesLesson 10 AssessmentMeriamNo ratings yet
- Nov 2003 and May 2004 CE Licensure Exam - MATHandSURVDocument3 pagesNov 2003 and May 2004 CE Licensure Exam - MATHandSURVJerico LlovidoNo ratings yet
- Laminated Strip Under Three-Point BendingDocument6 pagesLaminated Strip Under Three-Point BendingDan WolfNo ratings yet
- The Principle and Applications of Bernoulli EquationDocument7 pagesThe Principle and Applications of Bernoulli EquationVincent John Borcelo100% (1)
- Presence of Oxalative Ions in Guava-Converted LololololDocument11 pagesPresence of Oxalative Ions in Guava-Converted LololololAnime SenseiNo ratings yet
- Audio Visual AidsDocument21 pagesAudio Visual AidsathiraNo ratings yet
- Socket Pin Count Cpu Families Frequency (MHZ) Bus Frequency (MHZ)Document3 pagesSocket Pin Count Cpu Families Frequency (MHZ) Bus Frequency (MHZ)ArjunKrNo ratings yet
- The Semiotic Square - Final WorkDocument15 pagesThe Semiotic Square - Final WorkGhazwaNo ratings yet
- 05 Time Response AnalysisDocument41 pages05 Time Response AnalysisFadly ShafiqNo ratings yet
- T TestDocument12 pagesT TestNantiwa NaulsreeNo ratings yet
- MR301 Series: DimensionsDocument3 pagesMR301 Series: DimensionsВолодя МачковNo ratings yet
- Norton's Theorem: Emina Džaferović Amina Obradović PiroDocument11 pagesNorton's Theorem: Emina Džaferović Amina Obradović PiroEminaNo ratings yet
- Characteristics: Compact Size Ideal For Any Type of UseDocument3 pagesCharacteristics: Compact Size Ideal For Any Type of UseVanegas YennyNo ratings yet
- Resource Management and Sustainable Development A Study of Pharmaceutical Firms in South East, NigeriaDocument12 pagesResource Management and Sustainable Development A Study of Pharmaceutical Firms in South East, NigeriaEditor IJTSRDNo ratings yet
- Cap Tip Spot WeldingDocument1 pageCap Tip Spot Weldingalim fakihNo ratings yet