You might also like
- Growth Theory: Larry BlumeDocument15 pagesGrowth Theory: Larry BlumehannesreiNo ratings yet
- Linear System Ramsey Phase GraphDocument15 pagesLinear System Ramsey Phase Graphmarithzahh9416No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- BellmanDocument8 pagesBellmanchiranjeevi kindinlaNo ratings yet
- From Ramsey To Thom: A Classical Problem in The Calculus of Variations Leading To An Implicit Di Erential EquationDocument23 pagesFrom Ramsey To Thom: A Classical Problem in The Calculus of Variations Leading To An Implicit Di Erential EquationKunal KishorNo ratings yet
- The Necessity of The Transversality Condition at Infinity: A (Very) Special CaseDocument6 pagesThe Necessity of The Transversality Condition at Infinity: A (Very) Special Casefil2011No ratings yet
- Mathematical Formulas for Economics and Business: A Simple IntroductionFrom EverandMathematical Formulas for Economics and Business: A Simple IntroductionRating: 4 out of 5 stars4/5 (4)
- Ramsey Growth ModelDocument56 pagesRamsey Growth ModelNaresh SehdevNo ratings yet
- Macroeconomic Theory of Neoclassical Growth ModelDocument31 pagesMacroeconomic Theory of Neoclassical Growth ModelaaxsenaaNo ratings yet
- Dynamic Equilibrium Models III: Infinite PeriodsDocument15 pagesDynamic Equilibrium Models III: Infinite PeriodsDavidNo ratings yet
- Economics - Exercise With Bellman EquationDocument16 pagesEconomics - Exercise With Bellman EquationSalvatore LaduNo ratings yet
- Mathii at Su and Sse: John Hassler Iies, Stockholm University February 25, 2005Document87 pagesMathii at Su and Sse: John Hassler Iies, Stockholm University February 25, 2005kolman2No ratings yet
- Handout Class 3: 1 The Model EconomyDocument10 pagesHandout Class 3: 1 The Model EconomykeyyongparkNo ratings yet
- Maximizing Firm Profits and Consumer Utility Over TimeDocument5 pagesMaximizing Firm Profits and Consumer Utility Over TimeillmanNo ratings yet
- Advanced Macro NotesDocument134 pagesAdvanced Macro NotesJavier CanoNo ratings yet
- Econ 602 class notes on the Ramsey-Cass-Koopman modelDocument10 pagesEcon 602 class notes on the Ramsey-Cass-Koopman modelfabianmauricio482No ratings yet
- Dynamic Equilibrium Models Iii: Business-Cycle ModelsDocument26 pagesDynamic Equilibrium Models Iii: Business-Cycle ModelsRaiyan AhsanNo ratings yet
- 1 Unconstrained Optimization On Open SetDocument2 pages1 Unconstrained Optimization On Open SetMatos DanielNo ratings yet
- A User's Guide To Solving Real Business Cycle ModelsDocument18 pagesA User's Guide To Solving Real Business Cycle Modelssamir880No ratings yet
- NaDocument67 pagesNaarulmuruguNo ratings yet
- AMA1 Lecture3Document16 pagesAMA1 Lecture3D. KNo ratings yet
- Optimal Control TheoryDocument14 pagesOptimal Control TheoryFederico De AngelisNo ratings yet
- Lecture Notes on Numerical Analysis of Partial Differential EquationsDocument62 pagesLecture Notes on Numerical Analysis of Partial Differential Equationsmohammad affanNo ratings yet
- Topic 1: Introduction To Intertemporal Optimization: Yulei LuoDocument59 pagesTopic 1: Introduction To Intertemporal Optimization: Yulei LuoNamNo ratings yet
- Chapter 7-Dynamic OptimizationDocument43 pagesChapter 7-Dynamic OptimizationLou MohamedNo ratings yet
- Assignment 2Document3 pagesAssignment 2David HuangNo ratings yet
- Macroeconomics 1 PS3 Solution PDFDocument10 pagesMacroeconomics 1 PS3 Solution PDFTaib MuffakNo ratings yet
- Two-time optimal economic growth PDEsDocument5 pagesTwo-time optimal economic growth PDEsAlex Cruz CabreraNo ratings yet
- Applications of Differential Equations: Modelling Engineering SystemsDocument28 pagesApplications of Differential Equations: Modelling Engineering Systemsmaths203No ratings yet
- Exercise Set 1: Exercise 1 (L1) : The Simplest Consumption ModelDocument6 pagesExercise Set 1: Exercise 1 (L1) : The Simplest Consumption ModelSERGIO REQUENANo ratings yet
- 1 LagrangianDocument8 pages1 Lagrangian刘銘No ratings yet
- Applications of DerivativesDocument4 pagesApplications of DerivativesSharaine CastilloNo ratings yet
- ODM2022 Tutorial-3Document2 pagesODM2022 Tutorial-3MENo ratings yet
- Dynamic OptimizationDocument8 pagesDynamic Optimizationeulernewton22No ratings yet
- Wickens Questions3Document229 pagesWickens Questions3zkNo ratings yet
- Econ 242 Problem Set 4: U (C (T) ) e DTDocument3 pagesEcon 242 Problem Set 4: U (C (T) ) e DTkeyyongparkNo ratings yet
- Olg GrowthDocument57 pagesOlg GrowthamzelsoskNo ratings yet
- Notes On Intertemporal Optimization: Econ 204A - Henning BohnDocument11 pagesNotes On Intertemporal Optimization: Econ 204A - Henning BohnHector RubiniNo ratings yet
- Dynamic Programming MethodDocument3 pagesDynamic Programming Methodbobo411No ratings yet
- 2 Growth Neoclassical GrowthDocument71 pages2 Growth Neoclassical GrowthPAOLA NELLY ROJAS VALERONo ratings yet
- A Numerical Technique For Solving Fractional Optimal Control ProblemsDocument13 pagesA Numerical Technique For Solving Fractional Optimal Control ProblemsAntonio SánchezNo ratings yet
- Hasbun PosterDocument21 pagesHasbun PosterSuhailUmarNo ratings yet
- Note TVC (Transversality Condition)Document3 pagesNote TVC (Transversality Condition)David BoninNo ratings yet
- Dynamic ProgrammingDocument21 pagesDynamic ProgrammingFranck BanaletNo ratings yet
- Assignment 5 VFI PDFDocument2 pagesAssignment 5 VFI PDFGreco S50No ratings yet
- Vilan DynareDocument19 pagesVilan Dynarec9bj9bvr5dNo ratings yet
- Lagrange For Dyn OptDocument11 pagesLagrange For Dyn Optjohannes_schwarzerNo ratings yet
- EEB 551 Lab 2Document11 pagesEEB 551 Lab 2Chiko KheruNo ratings yet
- 2001-Problemas Capítulo 1, Edgar, Himmelblau, LasdonDocument9 pages2001-Problemas Capítulo 1, Edgar, Himmelblau, LasdonItzel NavaNo ratings yet
- Problem Set 1. 14.461 Fall 2012.: 1 Taxing LuckDocument8 pagesProblem Set 1. 14.461 Fall 2012.: 1 Taxing LuckRiçard HoxhaNo ratings yet
- Lect Notes 3Document63 pagesLect Notes 3Safis HajjouzNo ratings yet
- SGPE Lecture2Document48 pagesSGPE Lecture2Zubiya MoinNo ratings yet
- 5.1 Dynamic Programming and The HJB Equation: k+1 K K K KDocument30 pages5.1 Dynamic Programming and The HJB Equation: k+1 K K K KMaria ZourarakiNo ratings yet
- Monetary Policy and Business CyclesDocument38 pagesMonetary Policy and Business Cyclesyaseminnn_87No ratings yet
- Exam February 2015Document4 pagesExam February 2015zaurNo ratings yet
- 1 Clarida-Gali-Gertler Model: T T t+1 TDocument16 pages1 Clarida-Gali-Gertler Model: T T t+1 TMartin ZapataNo ratings yet
- (9780857937926 - Handbook of Research Methods and Applications in Transport Economics and Policy) Chapter 1 - IntroductionDocument6 pages(9780857937926 - Handbook of Research Methods and Applications in Transport Economics and Policy) Chapter 1 - Introduction1111111111111-859751No ratings yet
- Erasmus Charter For Higher Education-Signed PDFDocument4 pagesErasmus Charter For Higher Education-Signed PDF1111111111111-859751No ratings yet
- 2019 Key Action 1 VET Guide For Applications FINALDocument78 pages2019 Key Action 1 VET Guide For Applications FINAL1111111111111-859751No ratings yet
- Mba Strategy Quant MainDocument323 pagesMba Strategy Quant Main1111111111111-859751No ratings yet
- 2019 Key Action 1 VET Guide For Applications FINALDocument78 pages2019 Key Action 1 VET Guide For Applications FINAL1111111111111-859751No ratings yet
- Mba Strategy Quant AdvancedDocument196 pagesMba Strategy Quant Advanced1111111111111-859751No ratings yet
- Dive Into Python: Hillary Green-LermanDocument26 pagesDive Into Python: Hillary Green-Lerman1111111111111-859751No ratings yet
- Final - 2021 Theory and CompDocument4 pagesFinal - 2021 Theory and Comp1111111111111-859751No ratings yet
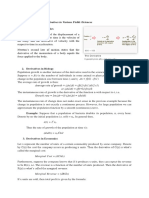
- Private-Sector Solutions To Negative Externalities: The SolutionDocument16 pagesPrivate-Sector Solutions To Negative Externalities: The Solution1111111111111-859751No ratings yet
- Dairy and Products Annual: Report NameDocument15 pagesDairy and Products Annual: Report Name1111111111111-859751No ratings yet
- Mba Strategy Quant MainDocument323 pagesMba Strategy Quant Main1111111111111-859751No ratings yet
- Federal Reserve Bank of Minneapolis: Spring 1994Document17 pagesFederal Reserve Bank of Minneapolis: Spring 19941111111111111-859751No ratings yet
- Econometric Analysis of Panel Data: William Greene Department of Economics University of South FloridaDocument87 pagesEconometric Analysis of Panel Data: William Greene Department of Economics University of South Florida1111111111111-859751No ratings yet
- Econometric Analysis of Panel DataDocument14 pagesEconometric Analysis of Panel Data1111111111111-859751No ratings yet
- Econometric Analysis of Panel Data: William Greene Department of Economics University of South FloridaDocument87 pagesEconometric Analysis of Panel Data: William Greene Department of Economics University of South Florida1111111111111-859751No ratings yet
- Time Series Models and ApplicationsDocument70 pagesTime Series Models and Applications1111111111111-859751No ratings yet
- Private-Sector Solutions To Negative Externalities: The SolutionDocument16 pagesPrivate-Sector Solutions To Negative Externalities: The Solution1111111111111-859751No ratings yet
- Data Extract From World Development IndicatorsDocument623 pagesData Extract From World Development Indicators1111111111111-859751No ratings yet
- Econometric Analysis of Panel Data: William Greene Department of Economics University of South FloridaDocument116 pagesEconometric Analysis of Panel Data: William Greene Department of Economics University of South Florida1111111111111-859751No ratings yet
- Don'T Panic!: A Guide To MATA21 Analysis in One Variable Version: January 22, 2020 Jan-Fredrik OlsenDocument100 pagesDon'T Panic!: A Guide To MATA21 Analysis in One Variable Version: January 22, 2020 Jan-Fredrik Olsen1111111111111-859751No ratings yet
- Time Series Models and ApplicationsDocument70 pagesTime Series Models and Applications1111111111111-859751No ratings yet
- Ross Et Al - Effect of Tobacco Tax Increases in Ukraine - 2012Document8 pagesRoss Et Al - Effect of Tobacco Tax Increases in Ukraine - 20121111111111111-859751No ratings yet
- Probset 4 KeyDocument7 pagesProbset 4 Key1111111111111-859751No ratings yet
- Business Mathematics 1st EditionDocument316 pagesBusiness Mathematics 1st EditionMark AnthonyNo ratings yet
- BBL 040Document11 pagesBBL 040Cindy MarianoNo ratings yet
- Manage Cargo with Comprehensive SystemDocument45 pagesManage Cargo with Comprehensive SystemShubham Chaurasia75% (8)
- Agao22 ScriptDocument208 pagesAgao22 ScriptMaja GwozdzNo ratings yet
- Linear Regression Guide: Modeling Relationships Between VariablesDocument25 pagesLinear Regression Guide: Modeling Relationships Between VariablesJoseph GeorgeNo ratings yet
- Cutter: GerberDocument2 pagesCutter: GerberDat HaNo ratings yet
- Genetic Algorithm Based Design of A Reinforced Concrete Cantilever BeamDocument4 pagesGenetic Algorithm Based Design of A Reinforced Concrete Cantilever BeamRonald De GuzmanNo ratings yet
- AFIT Scholar AFIT Scholar: Air Force Institute of Technology Air Force Institute of TechnologyDocument110 pagesAFIT Scholar AFIT Scholar: Air Force Institute of Technology Air Force Institute of TechnologyHenrique97489573496No ratings yet
- Maximize Football Production ProfitDocument3 pagesMaximize Football Production ProfitJune CostalesNo ratings yet
- An Adantive Generalized Sidelobe Canceller WithDocument9 pagesAn Adantive Generalized Sidelobe Canceller WithNitin KumarNo ratings yet
- ICAMM-2016 Conference Technical Sessions ScheduleDocument19 pagesICAMM-2016 Conference Technical Sessions SchedulePurna Suresh PedamalluNo ratings yet
- Nitro Soc DatasheetDocument5 pagesNitro Soc DatasheetAshwani MishraNo ratings yet
- Accelerate and Improve Business Outcomes With AIoTDocument26 pagesAccelerate and Improve Business Outcomes With AIoTMan HumanNo ratings yet
- Productflyer - 978 3 319 18841 6Document1 pageProductflyer - 978 3 319 18841 6Jesse BurrisNo ratings yet
- OPTIMIZING PROCESSESDocument18 pagesOPTIMIZING PROCESSESJohn Paul Palomino AndradeNo ratings yet
- Hart Venture CapitalDocument32 pagesHart Venture CapitalJoyce Kwok100% (1)
- AI in Production: A Game Changer For Manufacturers With Heavy AssetsDocument46 pagesAI in Production: A Game Changer For Manufacturers With Heavy AssetsNimish BatraNo ratings yet
- Module 5 - Madgwick FilterDocument46 pagesModule 5 - Madgwick FilterYonas Ghiwot100% (1)
- Olumuyiwa Oluwatomi Daniel 15CF02657 Che 522 AssignmentDocument14 pagesOlumuyiwa Oluwatomi Daniel 15CF02657 Che 522 AssignmentnelsonNo ratings yet
- ICICTA2008 Manuscript Vol 1 PDFDocument1,318 pagesICICTA2008 Manuscript Vol 1 PDFWilber Siles CastroNo ratings yet
- Response Surface MethodologyDocument25 pagesResponse Surface Methodologynithink100100% (1)
- ProposalDocument12 pagesProposalZolaNo ratings yet
- (International Series in Operations Research & Management Science) Erik Leuven Demeulemeester, Willy S. Herroelen - Project Scheduling - A Research Handbook (2002, Springer)Document710 pages(International Series in Operations Research & Management Science) Erik Leuven Demeulemeester, Willy S. Herroelen - Project Scheduling - A Research Handbook (2002, Springer)Khalil Kafrouni0% (1)
- PlatEMO A MATLAB Platform For Evolutionary Multi-Objective OptimizationDocument15 pagesPlatEMO A MATLAB Platform For Evolutionary Multi-Objective OptimizationTalaslıoğlu HoldingNo ratings yet
- 4implementation and Experimental DemonstrationDocument17 pages4implementation and Experimental DemonstrationSerethNo ratings yet
- Knapsack Problem HandoutDocument3 pagesKnapsack Problem HandoutFeynman LiangNo ratings yet
- Has Hash 2010Document11 pagesHas Hash 2010SHABANNo ratings yet
- Supercritical Water Gasification of Biomass Thermodynamic AnalysisDocument7 pagesSupercritical Water Gasification of Biomass Thermodynamic AnalysisLuiz Guilherme SilvaNo ratings yet
- Metric-Based Mathematical Derivation of Efficient Airfoil Design VariablesDocument37 pagesMetric-Based Mathematical Derivation of Efficient Airfoil Design VariablesBjorn FejerNo ratings yet
- Modeling of Brushless DC MotorDocument13 pagesModeling of Brushless DC Motorhodeegits9526No ratings yet
- Narrative Economics: How Stories Go Viral and Drive Major Economic EventsFrom EverandNarrative Economics: How Stories Go Viral and Drive Major Economic EventsRating: 4.5 out of 5 stars4.5/5 (94)
- The Trillion-Dollar Conspiracy: How the New World Order, Man-Made Diseases, and Zombie Banks Are Destroying AmericaFrom EverandThe Trillion-Dollar Conspiracy: How the New World Order, Man-Made Diseases, and Zombie Banks Are Destroying AmericaNo ratings yet
- Principles for Dealing with the Changing World Order: Why Nations Succeed or FailFrom EverandPrinciples for Dealing with the Changing World Order: Why Nations Succeed or FailRating: 4.5 out of 5 stars4.5/5 (237)
- University of Berkshire Hathaway: 30 Years of Lessons Learned from Warren Buffett & Charlie Munger at the Annual Shareholders MeetingFrom EverandUniversity of Berkshire Hathaway: 30 Years of Lessons Learned from Warren Buffett & Charlie Munger at the Annual Shareholders MeetingRating: 4.5 out of 5 stars4.5/5 (97)
- A History of the United States in Five Crashes: Stock Market Meltdowns That Defined a NationFrom EverandA History of the United States in Five Crashes: Stock Market Meltdowns That Defined a NationRating: 4 out of 5 stars4/5 (11)
- Nudge: The Final Edition: Improving Decisions About Money, Health, And The EnvironmentFrom EverandNudge: The Final Edition: Improving Decisions About Money, Health, And The EnvironmentRating: 4.5 out of 5 stars4.5/5 (92)
- The Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumFrom EverandThe Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumRating: 3 out of 5 stars3/5 (12)
- The Genius of Israel: The Surprising Resilience of a Divided Nation in a Turbulent WorldFrom EverandThe Genius of Israel: The Surprising Resilience of a Divided Nation in a Turbulent WorldRating: 4 out of 5 stars4/5 (17)
- The War Below: Lithium, Copper, and the Global Battle to Power Our LivesFrom EverandThe War Below: Lithium, Copper, and the Global Battle to Power Our LivesRating: 4.5 out of 5 stars4.5/5 (8)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- The New Elite: Inside the Minds of the Truly WealthyFrom EverandThe New Elite: Inside the Minds of the Truly WealthyRating: 4 out of 5 stars4/5 (10)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationFrom EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationRating: 4.5 out of 5 stars4.5/5 (46)
- Vulture Capitalism: Corporate Crimes, Backdoor Bailouts, and the Death of FreedomFrom EverandVulture Capitalism: Corporate Crimes, Backdoor Bailouts, and the Death of FreedomNo ratings yet
- Poor Economics: A Radical Rethinking of the Way to Fight Global PovertyFrom EverandPoor Economics: A Radical Rethinking of the Way to Fight Global PovertyRating: 4.5 out of 5 stars4.5/5 (263)
- How an Economy Grows and Why It Crashes: Collector's EditionFrom EverandHow an Economy Grows and Why It Crashes: Collector's EditionRating: 4.5 out of 5 stars4.5/5 (102)
- The Sovereign Individual: Mastering the Transition to the Information AgeFrom EverandThe Sovereign Individual: Mastering the Transition to the Information AgeRating: 4.5 out of 5 stars4.5/5 (89)
- Financial Literacy for All: Disrupting Struggle, Advancing Financial Freedom, and Building a New American Middle ClassFrom EverandFinancial Literacy for All: Disrupting Struggle, Advancing Financial Freedom, and Building a New American Middle ClassNo ratings yet
- Look Again: The Power of Noticing What Was Always ThereFrom EverandLook Again: The Power of Noticing What Was Always ThereRating: 5 out of 5 stars5/5 (3)
- Doughnut Economics: Seven Ways to Think Like a 21st-Century EconomistFrom EverandDoughnut Economics: Seven Ways to Think Like a 21st-Century EconomistRating: 4.5 out of 5 stars4.5/5 (37)
- The Myth of the Rational Market: A History of Risk, Reward, and Delusion on Wall StreetFrom EverandThe Myth of the Rational Market: A History of Risk, Reward, and Delusion on Wall StreetNo ratings yet
- The Finance Curse: How Global Finance Is Making Us All PoorerFrom EverandThe Finance Curse: How Global Finance Is Making Us All PoorerRating: 4.5 out of 5 stars4.5/5 (18)
- Economics 101: From Consumer Behavior to Competitive Markets—Everything You Need to Know About EconomicsFrom EverandEconomics 101: From Consumer Behavior to Competitive Markets—Everything You Need to Know About EconomicsRating: 5 out of 5 stars5/5 (2)