You might also like
- 4 Reinforcement Learning - Basic Algorithms: - S, A) ) and The Immediate Reward Function R (R (S, A, SDocument16 pages4 Reinforcement Learning - Basic Algorithms: - S, A) ) and The Immediate Reward Function R (R (S, A, SAnđela TodorovićNo ratings yet
- Lecture 15Document4 pagesLecture 15sachin bhadangNo ratings yet
- Non-Deterministic Reward and ActionDocument2 pagesNon-Deterministic Reward and ActionReddy BunnyNo ratings yet
- Regularization and Feature Selectio NDocument102 pagesRegularization and Feature Selectio NEhab EmamNo ratings yet
- RL Intro-2Document24 pagesRL Intro-2Mariana MeirelesNo ratings yet
- Lecture 3 - MDPs and Dynamic ProgrammingDocument66 pagesLecture 3 - MDPs and Dynamic ProgrammingTrinaya KodavatiNo ratings yet
- Sec 12Document5 pagesSec 12Prateer Kr RoyNo ratings yet
- Lec27 AcceptRejectDocument30 pagesLec27 AcceptRejecthu jackNo ratings yet
- Approximate RLDocument10 pagesApproximate RL杨烨峰No ratings yet
- CS6700 RL 2024 Wa1Document7 pagesCS6700 RL 2024 Wa1Rahul me20b145No ratings yet
- Chapter 5 - Managing Class A ItemsDocument17 pagesChapter 5 - Managing Class A ItemsKhánh Đoan Lê ĐìnhNo ratings yet
- Lecture02 SA T SDocument23 pagesLecture02 SA T SHui Ka HoNo ratings yet
- Tong Hop Cong Thuc SBDocument10 pagesTong Hop Cong Thuc SBKhải Hưng NguyễnNo ratings yet
- Lec 5Document13 pagesLec 5jessica magdyNo ratings yet
- Apresentacao: INCOME AND WEALTH DISTRIBUTION IN MACROECONOMICS: A CONTINUOUS - TIME APPROACHDocument68 pagesApresentacao: INCOME AND WEALTH DISTRIBUTION IN MACROECONOMICS: A CONTINUOUS - TIME APPROACHjonasrlaNo ratings yet
- GMM, MLE and Tests For Non-Linear Restrictions: 1 Generalized Method of Moments (GMM)Document15 pagesGMM, MLE and Tests For Non-Linear Restrictions: 1 Generalized Method of Moments (GMM)Juancho PalNo ratings yet
- Assignment 4 (Sol.) : Reinforcement LearningDocument6 pagesAssignment 4 (Sol.) : Reinforcement Learningsimar rocksNo ratings yet
- MCMC BriefDocument69 pagesMCMC Briefjakub_gramolNo ratings yet
- An Introduction To Policy Search Methods: Thomas FurmstonDocument33 pagesAn Introduction To Policy Search Methods: Thomas Furmstonbehera.eceNo ratings yet
- Lecture 5 - ModelFreePredictionDocument79 pagesLecture 5 - ModelFreePredictionTrinaya KodavatiNo ratings yet
- Quasi Newton TrpoDocument10 pagesQuasi Newton TrposumanNo ratings yet
- Assignment 5 (Sol.) : Reinforcement LearningDocument4 pagesAssignment 5 (Sol.) : Reinforcement Learningsachin bhadangNo ratings yet
- Q-Learning and Deep Q Networks (DQN)Document52 pagesQ-Learning and Deep Q Networks (DQN)bscjjwNo ratings yet
- SVM Incremental Learning, Adaptation and Optimization - IJCNN 2003 PresentationDocument11 pagesSVM Incremental Learning, Adaptation and Optimization - IJCNN 2003 PresentationChris DiehlNo ratings yet
- EC 6310: Advanced Econometric Theory: Bayesian Computation in The Nonlinear Regression ModelDocument33 pagesEC 6310: Advanced Econometric Theory: Bayesian Computation in The Nonlinear Regression ModelRenato Salazar RiosNo ratings yet
- EE 675 Lecture 27th MarchDocument4 pagesEE 675 Lecture 27th Marchsachin bhadangNo ratings yet
- Selecting The Right JobsDocument28 pagesSelecting The Right JobsIoannisNo ratings yet
- Chapter 1Document59 pagesChapter 1SHUBHI VARSHNEYNo ratings yet
- Agresti Ordinal TutorialDocument75 pagesAgresti Ordinal TutorialKen MatsudaNo ratings yet
- Stat 5002 Final Exam Formulas W 21Document7 pagesStat 5002 Final Exam Formulas W 21PaolaCastelwhiteNo ratings yet
- Cs421 Cheat SheetDocument2 pagesCs421 Cheat SheetJoe McGuckinNo ratings yet
- Op Tim IzationDocument22 pagesOp Tim IzationricsunNo ratings yet
- Machine Learning - Unit 2Document104 pagesMachine Learning - Unit 2sandtNo ratings yet
- EE675A Lecture 16Document6 pagesEE675A Lecture 16sachin bhadangNo ratings yet
- Parameter EstimationDocument32 pagesParameter EstimationRohit SinghNo ratings yet
- Advanced Microeconometrics - Spring 2021 Take Home Exam 2: A Demand and Supply Model of School CompetitionDocument6 pagesAdvanced Microeconometrics - Spring 2021 Take Home Exam 2: A Demand and Supply Model of School CompetitionOscar ArévaloNo ratings yet
- Research Methods Course SummaryDocument20 pagesResearch Methods Course SummaryYoucef KadriNo ratings yet
- SAC Explanation SlideDocument13 pagesSAC Explanation SlideRoyNo ratings yet
- Nonlinear Lect8Document14 pagesNonlinear Lect8Win Alfalah NasutionNo ratings yet
- 2 MergedDocument45 pages2 MergedKeerthana ChirumamillaNo ratings yet
- 03 Growth v3 PDFDocument28 pages03 Growth v3 PDFGate CseNo ratings yet
- Tema5 Teoria-2830Document57 pagesTema5 Teoria-2830Luis Alejandro Sanchez SanchezNo ratings yet
- Kalman Filter and SmootherDocument9 pagesKalman Filter and SmootherBubu BibuNo ratings yet
- PlasticityDocument16 pagesPlasticitySebastiao SilvaNo ratings yet
- Examen Metodos NumericosDocument17 pagesExamen Metodos Numericos阿人个人No ratings yet
- Answer Key & Solution Explanation, JEE Main Test Series, 14 Jan 2023Document36 pagesAnswer Key & Solution Explanation, JEE Main Test Series, 14 Jan 2023Gully GamingNo ratings yet
- Odf-SC1 05 MonteCarloDocument22 pagesOdf-SC1 05 MonteCarloi wNo ratings yet
- Option Pricing: A Simplified Approach: John C. Cox, Stephen A. Ross and Mark RubinsteinDocument19 pagesOption Pricing: A Simplified Approach: John C. Cox, Stephen A. Ross and Mark Rubinsteinsophisticated321No ratings yet
- Practice MidtermDocument4 pagesPractice MidtermArka MitraNo ratings yet
- LittomoreDocument169 pagesLittomoreKumar RahulNo ratings yet
- Lec 4Document16 pagesLec 4jessica magdyNo ratings yet
- Fa19 Lecture 15 MDPs IIDocument76 pagesFa19 Lecture 15 MDPs IISang Tấn TrươngNo ratings yet
- Be Computer-Engineering Semester-4 2018 December Applied-mathematics-IV-cbcgsDocument20 pagesBe Computer-Engineering Semester-4 2018 December Applied-mathematics-IV-cbcgsᴛᴀɴᴍᴀy ᴋᴀʀᴀɴɢᴜᴛᴋᴀʀNo ratings yet
- (Partially Observable) Markov Decision Processes: Frederike Petzschner & Lionel RigouxDocument19 pages(Partially Observable) Markov Decision Processes: Frederike Petzschner & Lionel RigouxmonsieresmNo ratings yet
- Lec 6 GinverseDocument43 pagesLec 6 GinverseValeria MoneroNo ratings yet
- Page 1 of Muhammad Imdadullah 03017454791, Pakistan ,: Mimdadasad@bzu - Edu.pkDocument4 pagesPage 1 of Muhammad Imdadullah 03017454791, Pakistan ,: Mimdadasad@bzu - Edu.pkzubairulhassanNo ratings yet
- Formula Sheet For Final - ExamDocument1 pageFormula Sheet For Final - ExamFlávia PedrosaNo ratings yet
- Admin 601-01 Midterm 2018筆記Document2 pagesAdmin 601-01 Midterm 2018筆記Jen ChangNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- How To Install Windows Drivers With Software Applications: August 1, 2006Document12 pagesHow To Install Windows Drivers With Software Applications: August 1, 2006Mohamad Lutfi IsmailNo ratings yet
- Mitutoyo 183-109 Data SheetDocument1 pageMitutoyo 183-109 Data SheetLaboratorio AveNo ratings yet
- Ubd Food ChainDocument5 pagesUbd Food Chainapi-313687749No ratings yet
- UPSC Paper 4 Binder PDFDocument17 pagesUPSC Paper 4 Binder PDFHsis AbedNo ratings yet
- Dürer's Rhinoceros Springer Esteban JMDocument29 pagesDürer's Rhinoceros Springer Esteban JMmiguelestebanNo ratings yet
- Pacific Plate Movement WorksheetDocument3 pagesPacific Plate Movement WorksheetJohn OsborneNo ratings yet
- 2nd Announcement 13th InaSH Meeting 2019Document14 pages2nd Announcement 13th InaSH Meeting 2019adinda permataNo ratings yet
- Earth Pressure At-Rest PDFDocument7 pagesEarth Pressure At-Rest PDFvpb literaturaNo ratings yet
- Savoldi-SIM and USIM File System - A Forensics PerspectiveDocument24 pagesSavoldi-SIM and USIM File System - A Forensics PerspectiveAntonio SavoldiNo ratings yet
- ESL BOOKS - IELTS Academic Writing Task 1 Vocabulary by ESL Fluency - PreviewDocument7 pagesESL BOOKS - IELTS Academic Writing Task 1 Vocabulary by ESL Fluency - Previewanirudh modhalavalasaNo ratings yet
- Unit 3Document9 pagesUnit 3Estefani ZambranoNo ratings yet
- Edci 67200 Abby Carlin Case Study FacilitationDocument9 pagesEdci 67200 Abby Carlin Case Study Facilitationapi-265670845No ratings yet
- Safety Instrumented Systems SummersDocument19 pagesSafety Instrumented Systems SummersCh Husnain BasraNo ratings yet
- Types of WomanDocument16 pagesTypes of Womanveerendra75% (4)
- UCO 359 Key & Solution 05Document3 pagesUCO 359 Key & Solution 05Anwesha SatpathyNo ratings yet
- Sample Intern PropDocument7 pagesSample Intern PropmaxshawonNo ratings yet
- TM Matematika X IPA 8Document31 pagesTM Matematika X IPA 8Muhammad Ilyas ArradyaNo ratings yet
- Innoventure List of Short Listed CandidatesDocument69 pagesInnoventure List of Short Listed CandidatesgovindmalhotraNo ratings yet
- English II Homework Module 6Document5 pagesEnglish II Homework Module 6Yojana DubonNo ratings yet
- Curriculum VitaeDocument4 pagesCurriculum Vitaeapi-200104647No ratings yet
- BS 8901 SEG Press ReleaseDocument3 pagesBS 8901 SEG Press Releasetjsunder449No ratings yet
- Certification of Anti-Seismic Devices According To The European Standard EN 15129:2009: Tasks For Manufacturers and Notified BodiesDocument9 pagesCertification of Anti-Seismic Devices According To The European Standard EN 15129:2009: Tasks For Manufacturers and Notified BodiesRobby PermataNo ratings yet
- Guideline For Grade and Compensation FitmentDocument5 pagesGuideline For Grade and Compensation FitmentVijit MisraNo ratings yet
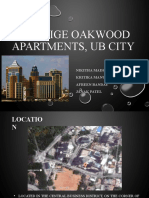
- Oakwood, Ub CityDocument18 pagesOakwood, Ub CityAfreen BandayNo ratings yet
- Anthro250J/Soc273E - Ethnography Inside Out: Fall 2005Document10 pagesAnthro250J/Soc273E - Ethnography Inside Out: Fall 2005Raquel Pérez AndradeNo ratings yet
- Research Methods SESSIONS STUDENTS Abeeku PDFDocument287 pagesResearch Methods SESSIONS STUDENTS Abeeku PDFdomaina2008100% (3)
- Topic 8 Class Notes1 PDFDocument6 pagesTopic 8 Class Notes1 PDFMuhammad Adnan LaghariNo ratings yet
- DonnetDocument12 pagesDonnetAsia SzmyłaNo ratings yet
- The FlirterDocument2 pagesThe Flirterdddbbb7No ratings yet
- Research ParadigmDocument1 pageResearch ParadigmJohnny WalkerNo ratings yet