Volume 9, Issue 3, March – 2024 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165 https://doi.org/10.38124/ijisrt/IJISRT24MAR732
Design of Hand Gesture Control Wheel Chair
Archibald Danquah-Amoah1 Kannan Govindan2
1 2
Accra Technical University Ghana University of Health and Allied Sciences Ho, Ghana
Abstract:- This study designated a wheelchair which can used wheelbarrows to move people and others substances.
be meticulous using the user hand gesture. The purpose Currently about one percent of the world’s population are
of this research was to come up with a hand gesture using wheelchair to aid their movements. This means an
powered wheelchair system intended to provide increased population of elderly and people with lower arms
assistance with the use of hand directions, which would disabilities are desiring to improve their mobility. A disable
allow users to travel efficiently and with greater ease. or an individual who has deformity of the lower part of the
The system is made up of various electronics components body can find it convenient to move around and maneuver
such as the microcontroller, accelerometer, Bluetooth using the help of a chair constructed on wheels which can
model, ultrasonic sensor, motor driver, among others. either be pushed or propelled by physical force or
The microcontroller is programmed. The transmitter electronically this is known as a wheelchair. Conventional
circuit board is made up of accelerometer sensor like wheelchairs do have a lot of limitation in many areas of
ADSL335 which is able to sense three parameters. The design such as flexibility, bulkiness, with limited functions.
microcontroller forms the main part or the brain of the This research incorporated hand gestures to synchronize
system, and performs most of the functions. The with the movement of the wheelchair, so users can have
microcontroller sends the readings sensed by the hand to comfort and ease fatigue. Even though some existing
the Bluetooth transmitter. The ultrasonic sensor detected wheelchairs are fitted with Personal Computer for gesture
obstacles, also sent the distance measured to the recognition; making a wheelchair with Personal Computer
microcontroller. The microcontroller processed the makes it bulkier and increases complexity. Wheelchairs
information to the motor driver. The motor driver then have given a lot of people independence. Wheelchairs are
powered the motors to either move forward or not only engineered products but rather it enables people
backward. It was observed that when the system was with disabilities to become mobile, remain healthy and
activated, the movement of the Wheelchair immediately participate fully in the society. A wheelchair service as a
start to follow the orientation of the user’s hand. The catalyst to increased independence and social integration but
wheelchair was able to be perform five (5) different not the end in itself. In addition to increased mobility, and
gestures. The gesture follows the range that had been set. provides thse user needs. Adequate training about the use of
However, this range depends on the position of the wheelchair is needed so as to mitigate common problems
accelerometer. such as pressure sores, the progression of deformities or
other secondary conditions. A wheelchair that is functional,
Keywords:- Hand Gesture, Wheelchair, Ultrasonic, Motor, comfortable and can be propelled efficiently to increase the
Accelerometer, and Microcontroller. activities a disable person can performed in a day if he or
she is without a wheelchair, also it makes him or her very
I. INTRODUCTION independent in his or her daily living and reduces
dependence on others. The wheelchair immensely gives
Background of Study them access to opportunities for education, employment and
Wheel chair is a chair with wheels, and it is one of the participation within the family and the society as a whole
finest supportive or assistive devices used by the aged and [1]. Determined the differences existed between those who
disabled people with difficulty in walking. Wheelchairs used power wheelchairs and those who used manual
come in a varied variation of setups to meet the specific wheelchairs. The data was collected using questionnaires for
needs of their user. The powered wheelchair, have a very self-esteem, function and participation. There were
unique features like the batteries and electric motors, which significant differences observed between manual and power
physically help to propelled wheelchair without any wheelchair users, however, there were several cofounding
assistances from any person. The old methods of using the factors which the authors acknowledged as limitations but
wheelchair by physically pushing it is a very cumbersome did not account for varying motor function [2]. There was a
for users required strength to push, therefore those without three-phase observation which was used to understand the
strength may need to depend on someone to push their chair. conditions and barriers that users of powered wheelchairs
The manual wheelchair cannot be used for longer distance find difficult to drive in or over in the outdoor environment.
since it requires more energy from the disability person. The The outcome shows that people who use power or electronic
wheelchair was first invented by Harry Jennings and for his wheelchairs encounter some with the location of joystick.
disabled friend Herbert Everest. There were both [3]. The research paper was an advanced approach of
mechanical engineers, together they invented the first charging the physical gesture of hand into the electrical
portable wheelchair using lightweight, steel, folding, in signal and process that signal into digital signal of
1933. Other inventions took place, like the Chinese who appropriate magnitude and to be transmitted through the
IJISRT24MAR732 www.ijisrt.com 2154
Volume 9, Issue 3, March – 2024 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165 https://doi.org/10.38124/ijisrt/IJISRT24MAR732
transmitters. This paper provides some answers to people The Two main Types of Wheelchairs are as follows
who involves accident and develop problem with their lower
limbs [6]. This wheelchair lacked ultrasonic sensors that will The Manual Wheelchair:
detect obstacle in front of them [4]. Propose a system which Manual wheelchairs are those that require human
provides solution for the physically handicapped people power to move them.
those who can’t move by themselves, using speech
commands by interfacing the Speech Recognition with The Powered Wheelchair
microcontroller and wheelchair, and the voice commands The electric-powered wheelchairs are those that are
are given to the Bluetooth module HC 05 kit with the help propelled by an electrically based powered.
of mic and wheel chair moves according to the given
directions which has an operating range of 10-100 meters Problem Statement
[5]. In the late 1970s at Rehabilitation Medicine at New The controlling of the traditional wheelchair/manually
York the first voice used wheelchair was constructed these propelled wheelchair is a harder task for users who does not
enables the user to be able to operate multiple items have required strength to push, therefore the user becomes a
including the telephone, radio, fans, curtains, intercom, burden on the family/society/community. Using the
page-turner and more. Norwegain (1984) a law-student also physical wheelchair for longer distance causes inevitable
used a voice wheelchair [7]. He was using it to attend his pain in the shoulders and arms and also Fatigue. Therefore,
classes without the help of an at anybody. The wheelchair the need to designed a wheelchair controlled by a hand
was customized for him using Katalavov speech-recognition movement/hand gesture for easy movement and to
system. Studies have shown that both age, adults and incorporate into wheelchair with an ultrasonic sensor which
children benefit considerably from access to means of will be used to detect an obstacle in front of the chair. This
independent mobility, this includes scooters, walkers, will Improve mobility and reducing dependency on
physical wheelchair, power wheelchair and of course robotic caregiver and family members. It is be easy therefore a lot
wheelchair. of people who cannot control the joystick can afford it.
Users don’t require any advanced training. It is easy to
operate and user friendly.
II. MATERIALS AND METHODS
Table 1 Showing the Material and Specification
IJISRT24MAR732 www.ijisrt.com 2155
Volume 9, Issue 3, March – 2024 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165 https://doi.org/10.38124/ijisrt/IJISRT24MAR732
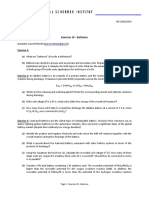
Methodology Flowchart
Fig 1 Hand Gesture Block Diagram and Wheelchair
Block Diagram
Hand Gesture and Wheelchair Block Diagram
The transmitter side which is the hand gesture and the
receiver side is the wheelchair. For the hand gesture, there
four main parts, the power supply, accelerometer, micro
controller and the Bluetooth model. The 9volts power Fig 2 Flowchart
supply is connected to the microcontroller. The
accelerometer sensor is connected to the microcontroller Once the system is started, all components are
which senses the position of the hand. The microcontroller initialized with power supply. The receiver waits for the
sends the readings sensed by the hand to the Bluetooth data from the transmitter. The program constantly checks if
transmitter. The receiver section which is the wheelchair is it has received any transmitter or information. It there is no
made up of ultrasonic sensor, microcontroller, Bluetooth information, it moves to the wait for the data to be
receiver, motor driver, and motor. The ultrasonic sensor communicated. If the data is acknowledged from the
detects obstacles and also sends the distance measured to the spreader, it then interprets the data. If there is an obstacle
microcontroller. The microcontroller processes the detected, the wheelchair stops. If there no obstacle the
information to the motor driver. The motor driver then wheelchair continues to move.
powers the motors to either move forward or backwards.
IJISRT24MAR732 www.ijisrt.com 2156
Volume 9, Issue 3, March – 2024 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165 https://doi.org/10.38124/ijisrt/IJISRT24MAR732
Methodology Circuit Diagram Circuit Diagram of the 5-volt DC battery from the Arduino AtMega board. A
Wheelchair (Receiver) voltage regulator is used to regulate to 9 volts power supply
into 5-volts. The transmitter circuit board is made up of
accelerometer sensor ADSL335 which can sense three
parameters x,y, and z axis. The microcontroller which is the
main part of the brain of the system and performs most of
the functions. The Bluetooth model AC06 operate on a logic
level of 3-volts. For the microcontroller to send signal to the
Bluetooth model without destroying it, it is sent through a
voltage divider which breaks down the voltage 5volts into 3-
volts. The switch is used to turn the system ON and OFF.
The receiver board consist of a microcontroller, ultrasonic
sensor, DC motor, Bluetooth model. The microcontroller is
powered by 5volts. The Arduino board has a voltage
regulator for regulation of the voltage that is needed by the
microcontroller and the Bluetooth module. The ultrasonic
has two power supply pin which trigger and echo pins which
was used to portion the distance of obstacles in front of the
wheelchair. The microcontroller determines which direction
to move the motor. The commands are sent to the motor
driver, which permits the motor to be driven with a higher
voltage and the rest of the circuit will be driven by the
remaining voltage so that it does not interfere with one
another.
Working Principle
Fig 3 Showing Circuit Diagram of Wheelchair (Receiver) This grants a method for monitoring wheelchair
movement using hand gestures recognition. This technique
Circuit Diagram of the Hand Gesture Controller was established based on the movement of the hand. It is
(Transmitter) modest and has some features to recognize and offers
toughness recognizing gestures of one hand. The hand
gesture is the transmitter while the wheelchair is the
receiver. The hand gesture has four main parts, which is the
power supply, accelerometer, microcontroller and the
Bluetooth mode. The power supply which uses 9volts is
connected to the microcontroller and it as well provides
power to the system. The accelerometer sensor is connected
to the microcontroller which sense the position of the
wheelchair. This microcontroller sends the readings sensed
by hand to the Bluetooth transmitter. The receiver section
which is the wheelchair is made up of ultrasonic sensor,
microcontroller, Bluetooth receiver, motor driver, and
motor. The ultrasonic sensor detects obstacles like, accident,
an object in front of the wheelchair and also sends the
distance measured to the microcontroller. The motor driver
which powers the motor to either move forward or
backwards is an information processed by the
microcontroller. In this method is able to recognize five
different hand gestures in the same background for five
status movements of the wheelchair like as, forward,
reverse, left, right and stop.
Fig 4 Showing the Circuit Diagram of Hand Gesture III. RESULT
Controller (Transmitter)
It was detected that when the system was triggered, the
Description Circuit Diagram movement of the Wheelchair would instantly begin to
The hand gesture wheelchair is powered with 9-volt follow the direction of the user’s hand. The wheelchair was
DC batteries. One battery is connected to the receiver circuit able to be controlled in five (5) different gestures. The
board and the other battery is connected to the hand gesture gesture follows the range that had been set. However, this
controller which is the transmitter board. Wholly further range depending on the position of the accelerometer. The
electronic mechanisms on the circuit board are supplied with hand movement is transferred and received via Bluetooth
IJISRT24MAR732 www.ijisrt.com 2157
Volume 9, Issue 3, March – 2024 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165 https://doi.org/10.38124/ijisrt/IJISRT24MAR732
through which it is sent to the microcontroller. These [7]. Khurana P. International Journal of Scientific
selected hand movement includes Flat, Upward, Downward, Technology Research, 2016 ,9 (41): 243-249. New
Left, and Right. The microcontroller which has been York, Pande V.V, Ubale N.S, Masurkar D.P. “Hand
programmed respond to the selected hand movement only. Gesture Based Wheelchair Movement Control for
The slanting of the user’s hands towards left or right Disabled Person Using MEMS” et al International
resulted in a similar motion of the Wheelchair however, Journal of Engineering Research and Applications
when the wheelchair progress near an obstacle within 20cm 2014, Issue 4(4), pp.152-158
it stopped as it determined that it was heading for a crash. At [8]. Patel A.N, Markovich DJ, Manfield D. Motion
the end of the testing 85 percent of response was achieved control using voice for wheelchair application, 2018.
using the upward gesture of the hand, 80 percent of the
result was achieved using the downward gesture of the hand.
85 percent of the response was achieved using the right
gesture of the hand, 85 percent of the response was achieved
using the left gesture of the hand and 75 percent of the
response was achieved using the flat gesture of the hand.
IV. DISCUSSION
Some 80 percent of people with disabilities live in low-
income countries According to The International Labour
Organization (ILO), with a hand gesture-controlled
wheelchair the majority of them will have an opportunity to
improve the quality of their lives socially and economically.
Therefore, having a hand gesture wheelchair will enhance
movements of the disable people. By this their economic
activities will improve, and making them independent.
V. CONCLUSION
The sign control wheelchair system was divided into
two important parts, the transmitter section and the receiver
section. The hand gesture signal was able to perform the
task by moving forward backward and sideways as
commanded. This will go a long way to help the hand
impaired and the aged in the community.
REFERENCES
[1]. Andrej S, Radovan S, Anton Z, Andrej K, Davorin
K, Daveler B. B. Completed a three-phase
observation studied to understand the conditions and
barriers that users of powered wheelchairs find
difficult to drive in or over in the outdoor
environment, 2015.
[2]. Bellis G, Schwersenz I, Marzuk P, Henderson D.
History of the wheelchair, 2017.pp. 01-02
[3]. Devi, B.A. Kumar. Accelerometer Based Direction
Controlled Wheelchair using Gesture Technology” in
International Journal of Scientific Engineering and
Technology, 2014, pp:1065-1070.
[4]. Hasting J, Robins H, Griffiths Y Determined the
differences existed between those who used power
wheelchairs and those who used manual wheelchairs,
2011.
[5]. Jha P., Khurana P. Charging the physical gesture of
hand into the electrical signal. 2016,16 (1): 18-27.
[6]. Rakhi. Kalantri, D.K. Chitre. Automatic wheelchair
using Gesture Recognition” in International Journal
of Engineering and Advanced Technology (IJEAT),
2013, pp.146-150.
IJISRT24MAR732 www.ijisrt.com 2158
You might also like
- Smart Wheel Chair For Specially Abled PeopleDocument5 pagesSmart Wheel Chair For Specially Abled PeopleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 3.-Smart-Wheelchair-for-Old-and-Disabled-1Document11 pages3.-Smart-Wheelchair-for-Old-and-Disabled-1Bhuvana NNo ratings yet
- Review of Motorized Tricycle For The Disabled PersonDocument5 pagesReview of Motorized Tricycle For The Disabled PersonsanjuNo ratings yet
- Irjet V4i3464 PDFDocument5 pagesIrjet V4i3464 PDFShubham VermaNo ratings yet
- Liter PDFDocument5 pagesLiter PDFAbdul RaqeebNo ratings yet
- LiterDocument5 pagesLiterAbdul RaqeebNo ratings yet
- Sakthivel 2020Document7 pagesSakthivel 2020s2002hadiNo ratings yet
- Wheelchair Cum Stretcher IJERTV6IS100039 PDFDocument5 pagesWheelchair Cum Stretcher IJERTV6IS100039 PDFsinganamala son'sNo ratings yet
- IJREISS_4094_95410Document13 pagesIJREISS_4094_95410ivs yeswanthNo ratings yet
- Biomaterial PDFDocument15 pagesBiomaterial PDFSEID ABDUNo ratings yet
- A Smart-Hand Movement-Based System To Control A Wheelchair WirelesslyDocument18 pagesA Smart-Hand Movement-Based System To Control A Wheelchair WirelesslyAKHILNo ratings yet
- Design Process and Development of A Prototype Electric WheelchairDocument7 pagesDesign Process and Development of A Prototype Electric WheelchairKANAK SHARMANo ratings yet
- Smart wheelchairs literature reviewDocument14 pagesSmart wheelchairs literature reviewFatkhul UmamNo ratings yet
- IoT Based Smart WheelchairDocument4 pagesIoT Based Smart WheelchairInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Project Report 1Document26 pagesProject Report 1Safalsha BabuNo ratings yet
- Ieee Report PublishedDocument6 pagesIeee Report PublishedNAUTASH KHANNo ratings yet
- Report On The Dvelopment of Automator of Wheel ChairDocument6 pagesReport On The Dvelopment of Automator of Wheel ChairM. Saqib TahirNo ratings yet
- Literature Review Main PointsDocument4 pagesLiterature Review Main Pointsitezaz ahmedNo ratings yet
- Advances in Smart Wheelchair Technology: January 2017Document8 pagesAdvances in Smart Wheelchair Technology: January 2017Leonardo Taffarel FerreiraNo ratings yet
- Design and Fabrication of Dynamic WheelchairDocument7 pagesDesign and Fabrication of Dynamic WheelchairIJRASETPublicationsNo ratings yet
- Design and development of conceptual wheelchair cum stretcherDocument9 pagesDesign and development of conceptual wheelchair cum stretcherKumar SonuNo ratings yet
- Solar Powered Smart Wheel Chair Controlled by MPU6050 and Voice App With Obstacle DetectionDocument8 pagesSolar Powered Smart Wheel Chair Controlled by MPU6050 and Voice App With Obstacle DetectionMohammad SayemNo ratings yet
- Electric Wheelchair Design and Its Impacts On Life Among The Disabled Individuals A ReviewDocument3 pagesElectric Wheelchair Design and Its Impacts On Life Among The Disabled Individuals A ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Mechanically Operated Wheelchair Convertible Stretcher and Walker Ijariie6974Document6 pagesMechanically Operated Wheelchair Convertible Stretcher and Walker Ijariie6974Ravi Kanth YadavNo ratings yet
- Report On Hand Gesture Controlled WheelchairDocument4 pagesReport On Hand Gesture Controlled WheelchairPRERNA SONINo ratings yet
- Accelerometer-Based Gesture-Based Wheelchair ControlDocument5 pagesAccelerometer-Based Gesture-Based Wheelchair ControlIJRASETPublicationsNo ratings yet
- Design and Development of A Hand-Glove Controlled Wheel ChairDocument5 pagesDesign and Development of A Hand-Glove Controlled Wheel ChairAbdur RahmanNo ratings yet
- Editor in Chief,+ej-Eng 2627Document6 pagesEditor in Chief,+ej-Eng 2627Ishu ReddyNo ratings yet
- Iot Operated Wheel Chair: Mr. Abhishek P V, Mr. Manjunatha H G, Mr. Sudarshan P B, Mr. Varun Reddy K PDocument3 pagesIot Operated Wheel Chair: Mr. Abhishek P V, Mr. Manjunatha H G, Mr. Sudarshan P B, Mr. Varun Reddy K PAhmed ShoeebNo ratings yet
- Chapter 1Document4 pagesChapter 1Rizwan Masood MughalNo ratings yet
- Project 3rd1 PDFDocument50 pagesProject 3rd1 PDFAbdul RaqeebNo ratings yet
- (1-5) CE GESTURE CONTROLLED WHEELCHAIR-formatDocument5 pages(1-5) CE GESTURE CONTROLLED WHEELCHAIR-formatAKHILNo ratings yet
- Design Issues and Applications For A Passive-Dynamic WalkerDocument16 pagesDesign Issues and Applications For A Passive-Dynamic WalkerYogeshTakNo ratings yet
- Stair Climbing Wheelchair For Disabled Person: N.N. Sorate, M.B.SUL, N.B. Malgunde, A.N.KaleDocument4 pagesStair Climbing Wheelchair For Disabled Person: N.N. Sorate, M.B.SUL, N.B. Malgunde, A.N.KaleMuzaffar KhanNo ratings yet
- A Methodology For Creating Intelligent Wheelchair Users' ProfilesDocument9 pagesA Methodology For Creating Intelligent Wheelchair Users' ProfilesJuan SlaxNo ratings yet
- Wheel Chair GroupDocument16 pagesWheel Chair GroupTejveer SirohiNo ratings yet
- Design and Fabrication of Wheelchair Cum Stretcher IJERTV11IS080059Document6 pagesDesign and Fabrication of Wheelchair Cum Stretcher IJERTV11IS080059Aadarsh tripathiNo ratings yet
- Multi-Mode Electric WheelchairDocument7 pagesMulti-Mode Electric Wheelchairhavocmathan143mpNo ratings yet
- Design and development of smart voice control wheelchairDocument6 pagesDesign and development of smart voice control wheelchairTisha ColeeneNo ratings yet
- ESRA - Electric Scooter Robot Arm: January 2010Document14 pagesESRA - Electric Scooter Robot Arm: January 2010Rubén CorreaNo ratings yet
- GS 2015 P-2 IcpsdtDocument11 pagesGS 2015 P-2 IcpsdtRõČķ BőÝNo ratings yet
- Microcontroller Based Hand Glove Controlled WheelchairDocument8 pagesMicrocontroller Based Hand Glove Controlled Wheelchairmoh300No ratings yet
- Auto Comforted Wheelchair For QuadriplegicsDocument5 pagesAuto Comforted Wheelchair For QuadriplegicsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Wheeled Mobility With Health Monitoring SystemDocument4 pagesWheeled Mobility With Health Monitoring SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Research Paper 1Document6 pagesResearch Paper 1Mankaran SinghNo ratings yet
- A Novel Multipurpose Smart Wheelchair: 2014 IEEE Students' On Electrical, Electronics and Computer ScienceDocument4 pagesA Novel Multipurpose Smart Wheelchair: 2014 IEEE Students' On Electrical, Electronics and Computer SciencesantoshNo ratings yet
- R Internship Project Report HONDADocument5 pagesR Internship Project Report HONDAAkshay KhannaNo ratings yet
- Development of A Modular Real Time Shared Control System For A Smart WheelchairDocument12 pagesDevelopment of A Modular Real Time Shared Control System For A Smart Wheelchairpsanoop2023No ratings yet
- Autonomous Navigation of Smart Wheelchair Using Kinect CameraDocument2 pagesAutonomous Navigation of Smart Wheelchair Using Kinect CameraerpublicationNo ratings yet
- Wheelchair Operated by Tongue MotionDocument8 pagesWheelchair Operated by Tongue MotionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Prototype of Electric Wheelchair Controlled by Eye-Only For Paralyzed UserDocument2 pagesA Prototype of Electric Wheelchair Controlled by Eye-Only For Paralyzed UserQazi KamalNo ratings yet
- Wheel Chair Cum StrecherDocument9 pagesWheel Chair Cum StrecherSendhilNathanNo ratings yet
- Report of - Voice Controlled ChairDocument70 pagesReport of - Voice Controlled ChairaamirNo ratings yet
- Design and Development of A Data Glove For The Assistance of The Physically ChallengedDocument4 pagesDesign and Development of A Data Glove For The Assistance of The Physically ChallengedSebastin AshokNo ratings yet
- Design of Voice-Controlled Smart Wheelchair For PHDocument12 pagesDesign of Voice-Controlled Smart Wheelchair For PHking girmaNo ratings yet
- Project Objective: General ObjectiveDocument2 pagesProject Objective: General ObjectiveAwoke TesfaNo ratings yet
- Iot Operated Wheel ChairDocument4 pagesIot Operated Wheel ChairAnonymous D5OSzzfNo ratings yet
- Smart vehicle for disabled peopleDocument12 pagesSmart vehicle for disabled peoplemannem karthikNo ratings yet
- Optical Fiber Sensors for the Next Generation of Rehabilitation RoboticsFrom EverandOptical Fiber Sensors for the Next Generation of Rehabilitation RoboticsNo ratings yet
- An Analysis on Mental Health Issues among IndividualsDocument6 pagesAn Analysis on Mental Health Issues among IndividualsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Insights into Nipah Virus: A Review of Epidemiology, Pathogenesis, and Therapeutic AdvancesDocument8 pagesInsights into Nipah Virus: A Review of Epidemiology, Pathogenesis, and Therapeutic AdvancesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Compact and Wearable Ventilator System for Enhanced Patient CareDocument4 pagesCompact and Wearable Ventilator System for Enhanced Patient CareInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Smart Cities: Boosting Economic Growth through Innovation and EfficiencyDocument19 pagesSmart Cities: Boosting Economic Growth through Innovation and EfficiencyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Implications of Adnexal Invasions in Primary Extramammary Paget’s Disease: A Systematic ReviewDocument6 pagesImplications of Adnexal Invasions in Primary Extramammary Paget’s Disease: A Systematic ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Parkinson’s Detection Using Voice Features and Spiral DrawingsDocument5 pagesParkinson’s Detection Using Voice Features and Spiral DrawingsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Relationship between Teacher Reflective Practice and Students Engagement in the Public Elementary SchoolDocument31 pagesThe Relationship between Teacher Reflective Practice and Students Engagement in the Public Elementary SchoolInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Harnessing Open Innovation for Translating Global Languages into Indian LanuagesDocument7 pagesHarnessing Open Innovation for Translating Global Languages into Indian LanuagesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Air Quality Index Prediction using Bi-LSTMDocument8 pagesAir Quality Index Prediction using Bi-LSTMInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Investigating Factors Influencing Employee Absenteeism: A Case Study of Secondary Schools in MuscatDocument16 pagesInvestigating Factors Influencing Employee Absenteeism: A Case Study of Secondary Schools in MuscatInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Advancing Healthcare Predictions: Harnessing Machine Learning for Accurate Health Index PrognosisDocument8 pagesAdvancing Healthcare Predictions: Harnessing Machine Learning for Accurate Health Index PrognosisInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Exploring the Molecular Docking Interactions between the Polyherbal Formulation Ibadhychooranam and Human Aldose Reductase Enzyme as a Novel Approach for Investigating its Potential Efficacy in Management of CataractDocument7 pagesExploring the Molecular Docking Interactions between the Polyherbal Formulation Ibadhychooranam and Human Aldose Reductase Enzyme as a Novel Approach for Investigating its Potential Efficacy in Management of CataractInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Dense Wavelength Division Multiplexing (DWDM) in IT Networks: A Leap Beyond Synchronous Digital Hierarchy (SDH)Document2 pagesDense Wavelength Division Multiplexing (DWDM) in IT Networks: A Leap Beyond Synchronous Digital Hierarchy (SDH)International Journal of Innovative Science and Research TechnologyNo ratings yet
- The Making of Object Recognition Eyeglasses for the Visually Impaired using Image AIDocument6 pagesThe Making of Object Recognition Eyeglasses for the Visually Impaired using Image AIInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Utilization of Date Palm (Phoenix dactylifera) Leaf Fiber as a Main Component in Making an Improvised Water FilterDocument11 pagesThe Utilization of Date Palm (Phoenix dactylifera) Leaf Fiber as a Main Component in Making an Improvised Water FilterInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Impact of Digital Marketing Dimensions on Customer SatisfactionDocument6 pagesThe Impact of Digital Marketing Dimensions on Customer SatisfactionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Survey of the Plastic Waste used in Paving BlocksDocument4 pagesA Survey of the Plastic Waste used in Paving BlocksInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Diabetic Retinopathy Stage Detection Using CNN and Inception V3Document9 pagesDiabetic Retinopathy Stage Detection Using CNN and Inception V3International Journal of Innovative Science and Research TechnologyNo ratings yet
- Formulation and Evaluation of Poly Herbal Body ScrubDocument6 pagesFormulation and Evaluation of Poly Herbal Body ScrubInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Comparatively Design and Analyze Elevated Rectangular Water Reservoir with and without Bracing for Different Stagging HeightDocument4 pagesComparatively Design and Analyze Elevated Rectangular Water Reservoir with and without Bracing for Different Stagging HeightInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Terracing as an Old-Style Scheme of Soil Water Preservation in Djingliya-Mandara Mountains- CameroonDocument14 pagesTerracing as an Old-Style Scheme of Soil Water Preservation in Djingliya-Mandara Mountains- CameroonInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Explorning the Role of Machine Learning in Enhancing Cloud SecurityDocument5 pagesExplorning the Role of Machine Learning in Enhancing Cloud SecurityInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Auto Encoder Driven Hybrid Pipelines for Image Deblurring using NAFNETDocument6 pagesAuto Encoder Driven Hybrid Pipelines for Image Deblurring using NAFNETInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Cyberbullying: Legal and Ethical Implications, Challenges and Opportunities for Policy DevelopmentDocument7 pagesCyberbullying: Legal and Ethical Implications, Challenges and Opportunities for Policy DevelopmentInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Review: Pink Eye Outbreak in IndiaDocument3 pagesA Review: Pink Eye Outbreak in IndiaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Design, Development and Evaluation of Methi-Shikakai Herbal ShampooDocument8 pagesDesign, Development and Evaluation of Methi-Shikakai Herbal ShampooInternational Journal of Innovative Science and Research Technology100% (3)
- Electro-Optics Properties of Intact Cocoa Beans based on Near Infrared TechnologyDocument7 pagesElectro-Optics Properties of Intact Cocoa Beans based on Near Infrared TechnologyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Hepatic Portovenous Gas in a Young MaleDocument2 pagesHepatic Portovenous Gas in a Young MaleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Navigating Digitalization: AHP Insights for SMEs' Strategic TransformationDocument11 pagesNavigating Digitalization: AHP Insights for SMEs' Strategic TransformationInternational Journal of Innovative Science and Research Technology100% (1)
- Automatic Power Factor ControllerDocument4 pagesAutomatic Power Factor ControllerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- MakeUseOf Android Rooting Guide: Unlock Your Phone's Full PotentialDocument30 pagesMakeUseOf Android Rooting Guide: Unlock Your Phone's Full PotentialPaul Kostrzewa100% (2)
- Lensing, Joining and SplicingDocument11 pagesLensing, Joining and Splicingkumarnath jNo ratings yet
- EIN 01 Questions 20 November 10Document22 pagesEIN 01 Questions 20 November 10Aleihs AyadneNo ratings yet
- ELEC-E3520 Digital Microelectronics I: Marko KosunenDocument38 pagesELEC-E3520 Digital Microelectronics I: Marko KosunenMuhammad Royyan ZahirNo ratings yet
- Compressor Fault Code GuideDocument15 pagesCompressor Fault Code GuideMahmoud MagdyNo ratings yet
- Exercise 10 - Batteries: ElektrochemieDocument3 pagesExercise 10 - Batteries: ElektrochemieHữu ĐứcNo ratings yet
- Optimizing P-Channels for Switching and RectificationDocument5 pagesOptimizing P-Channels for Switching and RectificationTim PriceNo ratings yet
- ABB - End To End Embedded Power GuideDocument64 pagesABB - End To End Embedded Power Guidemher bakalianNo ratings yet
- IR Moisture Sensor ManualDocument113 pagesIR Moisture Sensor ManualFachrurroziAs100% (1)
- LX 310Document2 pagesLX 310Anastasia NoormaNo ratings yet
- ESS+Intermec+PF8T NewDocument17 pagesESS+Intermec+PF8T NewmtlpcguysNo ratings yet
- Ficha Tecnica C400D6Document4 pagesFicha Tecnica C400D6Caro PereraNo ratings yet
- APACHE REDIS Training: Trainer:David JosephDocument3 pagesAPACHE REDIS Training: Trainer:David JosephDavid JosephNo ratings yet
- UD05848B Baseline 2600 Series Quick Start Guide V2.0 171120Document44 pagesUD05848B Baseline 2600 Series Quick Start Guide V2.0 171120Skynet Ve AsociadosNo ratings yet
- Operation Manual: H100 Series High Performance Vector Control InverterDocument111 pagesOperation Manual: H100 Series High Performance Vector Control Inverternaudi20No ratings yet
- Remote Control Unit 2 (RCU2) Installation InstructionsDocument4 pagesRemote Control Unit 2 (RCU2) Installation InstructionsAmine XGhost MidoNo ratings yet
- Numaapi3 PDFDocument12 pagesNumaapi3 PDFfermarioNo ratings yet
- A Comparison of in Memory DatabasesDocument6 pagesA Comparison of in Memory DatabasesPiyush MandalNo ratings yet
- Isc N-Channel MOSFET Transistor 14N05: INCHANGE Semiconductor Product SpecificationDocument2 pagesIsc N-Channel MOSFET Transistor 14N05: INCHANGE Semiconductor Product SpecificationYASIRNo ratings yet
- Single Phase To Three Phase ConverterDocument5 pagesSingle Phase To Three Phase ConverterGabriel MejiaNo ratings yet
- PRP TutorialDocument0 pagesPRP TutorialsuudonNo ratings yet
- Speed Up Windows 7 - Ultimate GuideDocument11 pagesSpeed Up Windows 7 - Ultimate GuideIr FaizzuddeenNo ratings yet
- Lab Report 1Document9 pagesLab Report 1Hajer JejeNo ratings yet
- Ao3413 PDFDocument5 pagesAo3413 PDFMohamed Ibrahim AhamedRasmiNo ratings yet
- Lemon BatteryDocument7 pagesLemon BatteryVijay GbNo ratings yet
- 951 171 003 EN - TCM - 12 169531Document80 pages951 171 003 EN - TCM - 12 169531AlvaroNo ratings yet
- D1492 Re OPMAN, EXCEL HR, ENGLISHDocument84 pagesD1492 Re OPMAN, EXCEL HR, ENGLISHkhawar mukhtarNo ratings yet
- Faculty Test Laplace Transform TablesDocument3 pagesFaculty Test Laplace Transform TablesumarNo ratings yet
- ck61 Ug WinmobDocument190 pagesck61 Ug Winmob07939312No ratings yet
- Power System PPT On CORONADocument13 pagesPower System PPT On CORONAg4ubhNo ratings yet