You might also like
- Deformable Spatial Pyramid Matching For Fast Dense CorrespondencesDocument8 pagesDeformable Spatial Pyramid Matching For Fast Dense Correspondencessyed shahNo ratings yet
- Shape Completion From A Single RGBD Image: Dongping Li, Tianjia Shao, Hongzhi Wu, and Kun Zhou, Fellow, IEEEDocument14 pagesShape Completion From A Single RGBD Image: Dongping Li, Tianjia Shao, Hongzhi Wu, and Kun Zhou, Fellow, IEEEAchmad LukmanNo ratings yet
- LRM: L R M S I 3D: Arge Econstruction Odel For Ingle Mage ToDocument23 pagesLRM: L R M S I 3D: Arge Econstruction Odel For Ingle Mage Tocaxidas953No ratings yet
- 1.fan - A Point Set Generation Network For 3D Object Reconstruction From A Single Image - CVPR - 2017 - PaperDocument9 pages1.fan - A Point Set Generation Network For 3D Object Reconstruction From A Single Image - CVPR - 2017 - PaperxuhangmkNo ratings yet
- Deng Deformed Implicit Field Modeling 3D Shapes With Learned Dense Correspondence CVPR 2021 PaperDocument11 pagesDeng Deformed Implicit Field Modeling 3D Shapes With Learned Dense Correspondence CVPR 2021 PaperVivian LiNo ratings yet
- S ChangeDocument8 pagesS ChangeRohitMadkeNo ratings yet
- Berg Cvpr05Document8 pagesBerg Cvpr05Babu MadanNo ratings yet
- Face Models from Uncalibrated VideoDocument9 pagesFace Models from Uncalibrated VideoCyrille LamasséNo ratings yet
- One-Dimensional Vector Based PatternDocument12 pagesOne-Dimensional Vector Based PatternAnonymous Gl4IRRjzNNo ratings yet
- 2009 MeshlessDocument24 pages2009 MeshlessThutchai PhoNo ratings yet
- FPGA Implementation of Efficient and High Speed Template Matching ModuleDocument5 pagesFPGA Implementation of Efficient and High Speed Template Matching ModuleseventhsensegroupNo ratings yet
- Stereo Matching ThesisDocument5 pagesStereo Matching Thesisbsem160v100% (1)
- Jia Leveraging Line-Point Consistence To Preserve Structures For Wide Parallax Image CVPR 2021 PaperDocument10 pagesJia Leveraging Line-Point Consistence To Preserve Structures For Wide Parallax Image CVPR 2021 PaperklammNo ratings yet
- Convolutional Knowledge Graph EmbeddingsDocument8 pagesConvolutional Knowledge Graph Embeddingsphanpeter_492No ratings yet
- Hinterstoisser Iccv11Document8 pagesHinterstoisser Iccv11Sergey KharagorgievNo ratings yet
- Geometry-Free View Synthesis: Transformers and No 3D PriorsDocument22 pagesGeometry-Free View Synthesis: Transformers and No 3D PriorsGARCIA LARA LUIS FERNANDO SEBASTIANNo ratings yet
- Rocco Convolutional Neural Network CVPR 2017 PaperDocument10 pagesRocco Convolutional Neural Network CVPR 2017 PaperAkshay PratapNo ratings yet
- Differentiable Surface SplattingDocument14 pagesDifferentiable Surface SplattingYulduz AtadjanovaNo ratings yet
- Shakibajahromi RIMeshGNN A Rotation-Invariant Graph Neural Network For Mesh Classification WACV 2024 PaperDocument11 pagesShakibajahromi RIMeshGNN A Rotation-Invariant Graph Neural Network For Mesh Classification WACV 2024 Paperzammadali00No ratings yet
- 1 s2.0 S0165168421003728 MainDocument12 pages1 s2.0 S0165168421003728 MainGeyson MaquineNo ratings yet
- Landmark Transferencia Con El Gráfico MinimalDocument14 pagesLandmark Transferencia Con El Gráfico MinimalBen Mur MarNo ratings yet
- Aic - 2022 - 35 2 - Aic 35 2 Aic210172 - Aic 35 Aic210172Document19 pagesAic - 2022 - 35 2 - Aic 35 2 Aic210172 - Aic 35 Aic210172mohamed walidNo ratings yet
- Pfister ICRA06 2Document8 pagesPfister ICRA06 2shuhao zhangNo ratings yet
- Rendernet: A Deep Convolutional Network For Differentiable Rendering From 3D ShapesDocument17 pagesRendernet: A Deep Convolutional Network For Differentiable Rendering From 3D ShapesAyhan MUCURNo ratings yet
- 3D Face Recognition Using Local Shape VariationDocument6 pages3D Face Recognition Using Local Shape VariationRoopika PalukurthiNo ratings yet
- Mocanu Tapu Zaharia 2015 3d Object MetamorphosisDocument8 pagesMocanu Tapu Zaharia 2015 3d Object MetamorphosisEduardo Romero AndradeNo ratings yet
- Koch ABC A Big CAD Model Dataset For Geometric Deep Learning CVPR 2019 PaperDocument11 pagesKoch ABC A Big CAD Model Dataset For Geometric Deep Learning CVPR 2019 PaperRene D. ArrietaNo ratings yet
- Unit 2Document12 pagesUnit 2GGRNo ratings yet
- Unsupervised Pixel-Level Domain Adaptation With Generative Adversarial NetworksDocument15 pagesUnsupervised Pixel-Level Domain Adaptation With Generative Adversarial NetworksqweasdzxcNo ratings yet
- Malik 2013Document12 pagesMalik 2013خير الحفظNo ratings yet
- Axel - Kilian - Fabrication of Double CurvedDocument15 pagesAxel - Kilian - Fabrication of Double CurvedsantopinoNo ratings yet
- Plantillas Gráficas para El Registro de Modelos.Document12 pagesPlantillas Gráficas para El Registro de Modelos.carlosNo ratings yet
- AdaStereo (2021)Document18 pagesAdaStereo (2021)Elizabeth MartinezNo ratings yet
- Interactive Design Space Exploration and Optimization For CAD ModelsDocument14 pagesInteractive Design Space Exploration and Optimization For CAD ModelsLuis gutierrezNo ratings yet
- 1-s2.0-S0893608023005695-mainDocument14 pages1-s2.0-S0893608023005695-mainhanumantha12No ratings yet
- Trzcinski_PAMI_preprintDocument14 pagesTrzcinski_PAMI_preprinthebaya2101No ratings yet
- DiffrtDocument11 pagesDiffrtTok TikNo ratings yet
- Point Based Rendering Enhancement Via Deep Learning: December 16, 2018Document13 pagesPoint Based Rendering Enhancement Via Deep Learning: December 16, 2018ArmandoNo ratings yet
- Algorithms: Using Graph Embedding Techniques in Process-Oriented Case-Based ReasoningDocument25 pagesAlgorithms: Using Graph Embedding Techniques in Process-Oriented Case-Based ReasoningJaroensak YodkanthaNo ratings yet
- Convolutional Mesh Regression For Single-Image Human Shape ReconstructionDocument10 pagesConvolutional Mesh Regression For Single-Image Human Shape Reconstruction7ddv29qw89No ratings yet
- Point Cloud Matching Based On 3D Self-SimilarityDocument9 pagesPoint Cloud Matching Based On 3D Self-SimilaritypinakiNo ratings yet
- Bayesian Stochastic Mesh Optimisation For 3D Reconstruction: George Vogiatzis Philip Torr Roberto CipollaDocument12 pagesBayesian Stochastic Mesh Optimisation For 3D Reconstruction: George Vogiatzis Philip Torr Roberto CipollaneilwuNo ratings yet
- Belongie Iccv01Document8 pagesBelongie Iccv01pavan2446No ratings yet
- Surface Creation On Unstructured Point Sets Using Neural Networks-Mehmet Ersin Yumer, Levent Burak Kara-2012Document13 pagesSurface Creation On Unstructured Point Sets Using Neural Networks-Mehmet Ersin Yumer, Levent Burak Kara-2012JennyJoyaNo ratings yet
- Region-Based Fractal Image Compression: Hannes Hartenstein, Associate Member, IEEE, Matthias Ruhl, and Dietmar SaupeDocument14 pagesRegion-Based Fractal Image Compression: Hannes Hartenstein, Associate Member, IEEE, Matthias Ruhl, and Dietmar SaupeMir Mohammed Ali OmerNo ratings yet
- High-Fidelity Pluralistic Image Completion With TransformersDocument10 pagesHigh-Fidelity Pluralistic Image Completion With TransformersTCOC33T Shivani RaoNo ratings yet
- Hashimoto Normal Estimation For Accurate 3D Mesh Reconstruction With Point Cloud CVPRW 2019 PaperDocument10 pagesHashimoto Normal Estimation For Accurate 3D Mesh Reconstruction With Point Cloud CVPRW 2019 PaperRicardo GarciaNo ratings yet
- Li Supervised Fitting of Geometric Primitives To 3D Point CloudsDocument9 pagesLi Supervised Fitting of Geometric Primitives To 3D Point CloudsYawkal AddisNo ratings yet
- Diff ShaderDocument12 pagesDiff Shaderds0313No ratings yet
- File 1635586830 110340 SHAPESNANIMATIONDocument10 pagesFile 1635586830 110340 SHAPESNANIMATIONdevansh gargNo ratings yet
- Research Article: Concrete Cracks Detection Using Convolutional Neural Network Based On Transfer LearningDocument10 pagesResearch Article: Concrete Cracks Detection Using Convolutional Neural Network Based On Transfer LearningVihangaNo ratings yet
- Information Sciences: Hao Li, Maoguo Gong, Qiguang Miao, Bin WangDocument20 pagesInformation Sciences: Hao Li, Maoguo Gong, Qiguang Miao, Bin Wangazazel17No ratings yet
- Grammar-Based 3D Facade Segmentation and ReconstructionDocument10 pagesGrammar-Based 3D Facade Segmentation and ReconstructionDuncan Dunn DundeeNo ratings yet
- 3D Scan Completion Using Example ModelsDocument10 pages3D Scan Completion Using Example ModelsQuốc Kiệt TrầnNo ratings yet
- A Generative Adversarial Network With Adaptive ConDocument12 pagesA Generative Adversarial Network With Adaptive ConShrida Prathamesh KalamkarNo ratings yet
- TPAMI-2008-05-0306-1Document14 pagesTPAMI-2008-05-0306-1hebaya2101No ratings yet
- The Patch Transform and Its Applications To Image EditingDocument8 pagesThe Patch Transform and Its Applications To Image Editingwolwarine1988No ratings yet
- mid2_Wang_Decoupling-and-Aggregating_for_Image_Exposure_CorrectionDocument10 pagesmid2_Wang_Decoupling-and-Aggregating_for_Image_Exposure_Correctionperry1005No ratings yet
- Lin_Deep_Frequency_Filtering_for_Domain_Generalization_CVPR_2023_paperDocument11 pagesLin_Deep_Frequency_Filtering_for_Domain_Generalization_CVPR_2023_paperperry1005No ratings yet
- Deconstructing Denoising Diffusion Models for Self-Supervised LearningDocument10 pagesDeconstructing Denoising Diffusion Models for Self-Supervised Learningperry1005No ratings yet
- mid1_Du_Minimizing_the_Accumulated_Trajectory_Error_To_Improve_Dataset_DistillationDocument10 pagesmid1_Du_Minimizing_the_Accumulated_Trajectory_Error_To_Improve_Dataset_Distillationperry1005No ratings yet
- A Decade’s Battle on Dataset BiasDocument20 pagesA Decade’s Battle on Dataset Biasperry1005No ratings yet
- Masked Autoencoders As Spatiotemporal LearnersDocument13 pagesMasked Autoencoders As Spatiotemporal Learnersperry1005No ratings yet
- Return of Unconditional GenerationDocument27 pagesReturn of Unconditional Generationperry1005No ratings yet
- Scaling Language-Image Pre-training via MaskingDocument11 pagesScaling Language-Image Pre-training via Maskingperry1005No ratings yet
- Transformers in Small Object Detection_SOTADocument20 pagesTransformers in Small Object Detection_SOTAperry1005No ratings yet
- Towards EndtoEnd Lane Detection an Instance SegmentationDocument7 pagesTowards EndtoEnd Lane Detection an Instance Segmentationperry1005No ratings yet
- Quantitative phase and intensityDocument12 pagesQuantitative phase and intensityperry1005No ratings yet
- Mla 8 Mla Citation PageDocument4 pagesMla 8 Mla Citation Pageapi-458274061No ratings yet
- CHM131 Presentation - Oxidation of MetalsDocument11 pagesCHM131 Presentation - Oxidation of MetalsNazrul ShahNo ratings yet
- Why it's important to guard your free timeDocument2 pagesWhy it's important to guard your free timeLaura Camila Garzón Cantor100% (1)
- Comparative Media SystemsDocument10 pagesComparative Media SystemsJoram MutwiriNo ratings yet
- T WiZ60Document6 pagesT WiZ60leon liNo ratings yet
- Public OpinionDocument7 pagesPublic OpinionSona Grewal100% (1)
- Retrenchment StrategiesDocument3 pagesRetrenchment StrategiesSABRI AKBAL MOHAMED HASSAN100% (3)
- MMME 21 1st Long Exam Lecture NotesDocument74 pagesMMME 21 1st Long Exam Lecture NotesGraver lumiousNo ratings yet
- HFH ch04Document11 pagesHFH ch04Harikrishan RNo ratings yet
- BED 101 Voc & Tech. Course ContentDocument3 pagesBED 101 Voc & Tech. Course ContentSunday PaulNo ratings yet
- Ce Brochure 20july16Document76 pagesCe Brochure 20july16Yogesh SharmaNo ratings yet
- The Joint Force Commander's Guide To Cyberspace Operations: by Brett T. WilliamsDocument8 pagesThe Joint Force Commander's Guide To Cyberspace Operations: by Brett T. Williamsأريزا لويسNo ratings yet
- MINTZBERGDocument32 pagesMINTZBERGgeezee10004464100% (2)
- Temenos Brochure - FormpipeDocument5 pagesTemenos Brochure - FormpipeDanial OngNo ratings yet
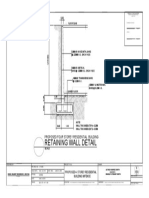
- Retaining Wall DetailsDocument1 pageRetaining Wall DetailsWilbert ReuyanNo ratings yet
- AlternatorDocument3 pagesAlternatorVatsal PatelNo ratings yet
- Manual PDFDocument9 pagesManual PDFRuth ResuelloNo ratings yet
- Introduction To Financial Planning Unit 1Document57 pagesIntroduction To Financial Planning Unit 1Joshua GeddamNo ratings yet
- Safety Data Sheet: 1. Identification of The Substance/preparation and of The Company/undertakingDocument4 pagesSafety Data Sheet: 1. Identification of The Substance/preparation and of The Company/undertakingBalasubramanian AnanthNo ratings yet
- Rolls-Royce M250 FIRST Network: 2015 Customer Support DirectoryDocument76 pagesRolls-Royce M250 FIRST Network: 2015 Customer Support Directoryale11vigarNo ratings yet
- Cla IdmaDocument160 pagesCla Idmacurotto1953No ratings yet
- NABARD Dairy Farming Project - PDF - Agriculture - Loans PDFDocument7 pagesNABARD Dairy Farming Project - PDF - Agriculture - Loans PDFshiba prasad panjaNo ratings yet
- Unit 1Document50 pagesUnit 1vaniphd3No ratings yet
- Little ThingsDocument3 pagesLittle ThingszwartwerkerijNo ratings yet
- Orion C.M. HVAC Case Study-07.25.23Document25 pagesOrion C.M. HVAC Case Study-07.25.23ledmabaya23No ratings yet
- Compare The Political System of Kazakhstan, USA, UK PresentationDocument19 pagesCompare The Political System of Kazakhstan, USA, UK PresentationAiganym OmiraliNo ratings yet
- 2023 Catalog Score SummerDocument65 pages2023 Catalog Score Summermadhudasa0% (2)
- Xt600e 3tb-3uw 90-95Document46 pagesXt600e 3tb-3uw 90-95Kenneth SynnesNo ratings yet
- Mondstadt City of Freedom Travel GuideDocument10 pagesMondstadt City of Freedom Travel GuideShypackofcheetos100% (3)
- DataSheet IMA18-10BE1ZC0K 6041793 enDocument8 pagesDataSheet IMA18-10BE1ZC0K 6041793 enRuben Hernandez TrejoNo ratings yet
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)From EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)No ratings yet
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepFrom EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepRating: 4.5 out of 5 stars4.5/5 (19)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceFrom EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceRating: 4.5 out of 5 stars4.5/5 (38)
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (15)
- Midjourney Mastery - The Ultimate Handbook of PromptsFrom EverandMidjourney Mastery - The Ultimate Handbook of PromptsRating: 4.5 out of 5 stars4.5/5 (2)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)From EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Rating: 4 out of 5 stars4/5 (1)
- The Digital Mind: How Science is Redefining HumanityFrom EverandThe Digital Mind: How Science is Redefining HumanityRating: 4.5 out of 5 stars4.5/5 (2)
- Make Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryFrom EverandMake Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryNo ratings yet
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsFrom EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNo ratings yet
- Killer ChatGPT Prompts: Harness the Power of AI for Success and ProfitFrom EverandKiller ChatGPT Prompts: Harness the Power of AI for Success and ProfitRating: 2 out of 5 stars2/5 (1)