You might also like
- Airplane Flying Handbook: FAA-H-8083-3C (2024)From EverandAirplane Flying Handbook: FAA-H-8083-3C (2024)Rating: 4 out of 5 stars4/5 (12)
- Aerodynamic Optimization of WingsDocument21 pagesAerodynamic Optimization of WingsMarcos SoarNo ratings yet
- Module 17Document117 pagesModule 17Cool ClipsNo ratings yet
- NASA Report - Theory For Computing Span Loads and Stability Derivatives Due To Side Slip, Yawing, and Rolling For Wings in Subsonic Compressible FlowDocument79 pagesNASA Report - Theory For Computing Span Loads and Stability Derivatives Due To Side Slip, Yawing, and Rolling For Wings in Subsonic Compressible Flowmssj87No ratings yet
- Aircraft Electrical Load and Power Source Capacity Analysis: Standard Guide ForDocument8 pagesAircraft Electrical Load and Power Source Capacity Analysis: Standard Guide ForAhmad Zubair RasulyNo ratings yet
- FTS - Fuel Tank Safety Phase 1 - RevDocument53 pagesFTS - Fuel Tank Safety Phase 1 - RevAgung SetiawanNo ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Aeroservoelastic Modeling, Analysis, and Design Techniques PDFDocument12 pagesAeroservoelastic Modeling, Analysis, and Design Techniques PDFkarthekeyanmenonNo ratings yet
- Report of Fluent Simulation of Aerofoil NACA 4412Document19 pagesReport of Fluent Simulation of Aerofoil NACA 4412احمد عبد المحمود100% (3)
- Loadsheet b737Document1 pageLoadsheet b737David PlichtaNo ratings yet
- Module 11A.3.4 L2 2016-11-06Document64 pagesModule 11A.3.4 L2 2016-11-06Abdul Aziz KhanNo ratings yet
- Study and Overview of Aerodynamic Active Rear Wing of High Speed VehiclesDocument6 pagesStudy and Overview of Aerodynamic Active Rear Wing of High Speed VehicleszxcvbnmnNo ratings yet
- A Matlab Program To Study Gust Loading On A Simple Aircraft ModelDocument83 pagesA Matlab Program To Study Gust Loading On A Simple Aircraft Modelmohammadrezamadadi100% (5)
- Aerodynamic Data Generation TechniquesDocument21 pagesAerodynamic Data Generation TechniquesThiago BoaventuraNo ratings yet
- A380-LEVEL I - ATA 27 Flight ControlsDocument66 pagesA380-LEVEL I - ATA 27 Flight ControlsAbolfazl Mazloomi86% (7)
- Iata CRM TemDocument184 pagesIata CRM TemPILCOMOV10No ratings yet
- ECE7360 Project3Document58 pagesECE7360 Project3Icaro.RedwarriorNo ratings yet
- Comparison Ipc OnerasDocument24 pagesComparison Ipc OnerasDaniel BackNo ratings yet
- Induced Drag Reduction Using Multiple Winglets, Looking Beyond The Prandtl-Munk Linear ModelDocument21 pagesInduced Drag Reduction Using Multiple Winglets, Looking Beyond The Prandtl-Munk Linear ModelBlas CaramutoNo ratings yet
- A Survey of Controller Designs For New Generation UAVs The Challenge of Uncertain Aerodynamic ParametersDocument16 pagesA Survey of Controller Designs For New Generation UAVs The Challenge of Uncertain Aerodynamic ParameterssamanNo ratings yet
- Single DOF Flutter CalculationsDocument29 pagesSingle DOF Flutter CalculationsSean Corry WrightNo ratings yet
- Overview and Summary of The Second AIAA High Lift Prediction Workshop (Invited)Document37 pagesOverview and Summary of The Second AIAA High Lift Prediction Workshop (Invited)Jose Taco Jr.No ratings yet
- Identification of Sharp Edge Non-Slender Delta Wing Aerodynamic Coefficient Using Neural NetworkDocument8 pagesIdentification of Sharp Edge Non-Slender Delta Wing Aerodynamic Coefficient Using Neural NetworkFahmi IzzuddinNo ratings yet
- AIAA SDM 2015 Paper KierDocument13 pagesAIAA SDM 2015 Paper KierAnmar Hamid AliNo ratings yet
- Flight Dynamics and Control Assessment For Differential Thrust Aircraft in Engine Inoperative Conditions Including Aero Propulsive EffectsDocument24 pagesFlight Dynamics and Control Assessment For Differential Thrust Aircraft in Engine Inoperative Conditions Including Aero Propulsive Effectscontact.diae.bouchikiNo ratings yet
- Extrenal AerodynamicsDocument18 pagesExtrenal AerodynamicsLuis Rubio GómezNo ratings yet
- Aiaa 2005 6027Document14 pagesAiaa 2005 6027SanteBrucoliNo ratings yet
- Identification of Gyroplane Lateral/directional Stability and Control Characteristics From Flight TestDocument15 pagesIdentification of Gyroplane Lateral/directional Stability and Control Characteristics From Flight TestYhoanColmenaresNo ratings yet
- Identification of Gyroplane Lateral/directional Stability and Control Characteristics From Flight TestDocument15 pagesIdentification of Gyroplane Lateral/directional Stability and Control Characteristics From Flight TestYhoanColmenaresNo ratings yet
- Similitude Requirements and Scaling Relationships Applied TestingDocument65 pagesSimilitude Requirements and Scaling Relationships Applied Testingmsmh.durrantNo ratings yet
- Dynamic Modelling and Experimental Identification of Four Rotors Helicopter ParametersDocument7 pagesDynamic Modelling and Experimental Identification of Four Rotors Helicopter Parametersali.azim1380No ratings yet
- Zhang 2011Document5 pagesZhang 2011Sajad Sadeghi MoghadamNo ratings yet
- Gallo Alex Méndez Bryan S Amueza Hugo Tapia S Amuel Tituaña Juan Velasco Enrique Velasco XavierDocument2 pagesGallo Alex Méndez Bryan S Amueza Hugo Tapia S Amuel Tituaña Juan Velasco Enrique Velasco XavierJimmy MontalvanNo ratings yet
- Analyzing The Lift of A Unmanned Aerial Vehicle Wing by Using Computational Fluid DynamicsDocument9 pagesAnalyzing The Lift of A Unmanned Aerial Vehicle Wing by Using Computational Fluid DynamicsZoya RizviNo ratings yet
- Naca653218 Airfoil Aerodynamic Properties 2168 9792 1000168Document5 pagesNaca653218 Airfoil Aerodynamic Properties 2168 9792 1000168Moh ZainollahNo ratings yet
- Nonlinear, Adaptive Control System For Payload Extraction OperationsDocument13 pagesNonlinear, Adaptive Control System For Payload Extraction Operationsabraha gebruNo ratings yet
- Aircraft Dynamics and SimulationDocument13 pagesAircraft Dynamics and SimulationTapan DasNo ratings yet
- Modeling, Control, and Flight Testing of A Small Ducted Fan AircraftDocument24 pagesModeling, Control, and Flight Testing of A Small Ducted Fan AircraftMul AdiNo ratings yet
- Aircraft Drag Polar Estimation Based On A Stochastic Hierarchical ModelDocument8 pagesAircraft Drag Polar Estimation Based On A Stochastic Hierarchical ModelPradyNo ratings yet
- PDelta 032Document7 pagesPDelta 032Vp RsmengrNo ratings yet
- Hovering Control of A Ducted Fan VTOL Unmanned Aerial Vehicle UAV Based On PID ControlDocument4 pagesHovering Control of A Ducted Fan VTOL Unmanned Aerial Vehicle UAV Based On PID ControlLuz RiveraNo ratings yet
- Aerodynamics For StudentsDocument6 pagesAerodynamics For StudentsSelva RajNo ratings yet
- Lane 1988Document13 pagesLane 1988kishan2016No ratings yet
- An Investigation Into Wing in Ground Effect Aerofoil GeometryDocument27 pagesAn Investigation Into Wing in Ground Effect Aerofoil GeometryVyssion100% (1)
- Helicopter Main Rotor Aerodynamic Simulation With CFD: October 2018Document8 pagesHelicopter Main Rotor Aerodynamic Simulation With CFD: October 2018MirkoD.InterbartoloNo ratings yet
- Numerical Investigations of Ducted Propeller Aerodynamics For A Mini Paramotor UAVDocument9 pagesNumerical Investigations of Ducted Propeller Aerodynamics For A Mini Paramotor UAVWidyahsri EllaNo ratings yet
- Paper - (JBE) Optimal Tracking Controller Design For A Small Scale Helicopter - A Budiyono, Singgih S Wibowo - 2007Document10 pagesPaper - (JBE) Optimal Tracking Controller Design For A Small Scale Helicopter - A Budiyono, Singgih S Wibowo - 2007Singgih Satrio WibowoNo ratings yet
- 2.4 Linearization: 2.4.1 Why Linearize?Document4 pages2.4 Linearization: 2.4.1 Why Linearize?gulamnabiNo ratings yet
- Itmconf Cmes-17 07008Document6 pagesItmconf Cmes-17 07008j2002dabdNo ratings yet
- Computational Study Into The Flow Field Developed Around A Cascade Around NACA0012 AirfoilDocument16 pagesComputational Study Into The Flow Field Developed Around A Cascade Around NACA0012 AirfoilKapsalis PanagiotisNo ratings yet
- Turbulent Flow Over Tutorial13Document10 pagesTurbulent Flow Over Tutorial13Sofian SalmaniNo ratings yet
- Final Published Version of PaperDocument7 pagesFinal Published Version of PaperarslansayaniNo ratings yet
- Khalid 2019Document6 pagesKhalid 2019SERENE SIBYNo ratings yet
- Tional Problem Optimal: Within The Model For of Pressure in ToDocument6 pagesTional Problem Optimal: Within The Model For of Pressure in ToRitesh SinghNo ratings yet
- 3-D P D A U C CFDDocument31 pages3-D P D A U C CFDFlorin NiteNo ratings yet
- Chapter 4 - IncompressibleFlowOver - AirfoilDocument23 pagesChapter 4 - IncompressibleFlowOver - AirfoilChristian NobertoNo ratings yet
- MP Avt 307 11 PDFDocument56 pagesMP Avt 307 11 PDFClaudio Souza OliveiraNo ratings yet
- Iaetsd-Jaras-Stall Characteristics of Single and Multi-ElementDocument6 pagesIaetsd-Jaras-Stall Characteristics of Single and Multi-ElementiaetsdiaetsdNo ratings yet
- Mathematical Model and Six-Degree-Of-Freedom Simulation of Two Business Jet AircraftDocument4 pagesMathematical Model and Six-Degree-Of-Freedom Simulation of Two Business Jet Aircraftkishan2016No ratings yet
- Flight Control Design Using BacksteppingDocument8 pagesFlight Control Design Using BacksteppinggarridolopezNo ratings yet
- Ame02 PDFDocument10 pagesAme02 PDFBogdan GargovNo ratings yet
- Multicopter Design Optimization and ValidationDocument13 pagesMulticopter Design Optimization and ValidationTuyen TranNo ratings yet
- Backstepping Controller For A F16 AircraftDocument6 pagesBackstepping Controller For A F16 AircraftPablo VianaNo ratings yet
- Lift Induced Drag Reduction: Sanchita Basu, Ashish SrivastavaDocument4 pagesLift Induced Drag Reduction: Sanchita Basu, Ashish SrivastavaerpublicationNo ratings yet
- Aerodynamics For Students - BladeDocument6 pagesAerodynamics For Students - BladeGaurang 'TottaPhilic' GuptaNo ratings yet
- Hectorguillermo 2018Document6 pagesHectorguillermo 2018vishal BhoknalNo ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- ArticleDocument12 pagesArticlegdudgshsNo ratings yet
- FCC For WebDocument8 pagesFCC For WebgdudgshsNo ratings yet
- EPN23Document5 pagesEPN23gdudgshsNo ratings yet
- 0022009418807866q PDFDocument4 pages0022009418807866q PDFgdudgshsNo ratings yet
- WSO ChecklistDocument1 pageWSO ChecklistgdudgshsNo ratings yet
- ,oeeelilDocument1 page,oeeelilgdudgshsNo ratings yet
- 10149371Document49 pages10149371gdudgshsNo ratings yet
- AT-420 Assembly GuideDocument10 pagesAT-420 Assembly GuidegdudgshsNo ratings yet
- RPG 7 WikipediaDocument8 pagesRPG 7 WikipediagdudgshsNo ratings yet
- RPG 6 WikipediaDocument2 pagesRPG 6 WikipediagdudgshsNo ratings yet
- 189633Document115 pages189633gdudgshsNo ratings yet
- RPG 16 WikipediaDocument3 pagesRPG 16 WikipediagdudgshsNo ratings yet
- BRIEFING GUIDE by DeeJayDocument1 pageBRIEFING GUIDE by DeeJaygdudgshsNo ratings yet
- Read PDF Star Wars The Blueprints AudiobookDocument1 pageRead PDF Star Wars The Blueprints AudiobookgdudgshsNo ratings yet
- Invoice No. 1419Document1 pageInvoice No. 1419gdudgshsNo ratings yet
- HK416 A5 - Technical DataDocument2 pagesHK416 A5 - Technical DatagdudgshsNo ratings yet
- Tadano Gr600ex Load ChartDocument1 pageTadano Gr600ex Load Chartasdasd asdasdNo ratings yet
- 03-2ezii (Ex-Lx-Dx) Codde 3 QRH1 V1Document352 pages03-2ezii (Ex-Lx-Dx) Codde 3 QRH1 V1sadh94No ratings yet
- Yugoslav Register YU-CKA To YU-CLZDocument5 pagesYugoslav Register YU-CKA To YU-CLZRadunNo ratings yet
- 6th GenerationDocument5 pages6th GenerationnazeeeeNo ratings yet
- FAA 8083 30 - Ch04Document34 pagesFAA 8083 30 - Ch04iostwxNo ratings yet
- Micro MiteDocument1 pageMicro MiteKalyan ProdhanNo ratings yet
- Introduction To Flight 9E Ise 9Th Ise Edition John D Anderson JR Full ChapterDocument67 pagesIntroduction To Flight 9E Ise 9Th Ise Edition John D Anderson JR Full Chaptermarylee.perez430100% (4)
- SID 55-10-01 Cessna 182 1977-1986Document4 pagesSID 55-10-01 Cessna 182 1977-1986sandyNo ratings yet
- SAE InternationalDocument1 pageSAE InternationalMukkund SunjiiNo ratings yet
- I N - S e R V I C e A C T I V I T I e S R e P o R TDocument21 pagesI N - S e R V I C e A C T I V I T I e S R e P o R TromixrayzenNo ratings yet
- Liverpool (EGGP) vMATS Part 2 - 2023 08Document63 pagesLiverpool (EGGP) vMATS Part 2 - 2023 08Joel AmparoNo ratings yet
- ZSWZDocument20 pagesZSWZjoker hotNo ratings yet
- 2006-11 Aero C Antenna DiscontinuedDocument4 pages2006-11 Aero C Antenna DiscontinuedVolodymyr PotapovNo ratings yet
- GOW - A318 - A319 - A320 - A321 - AMM - 01-Feb-2020 - 12-15-38-613-001-A - Fill The Potable Water Tank System (Aircraft Electrical Power Available)Document6 pagesGOW - A318 - A319 - A320 - A321 - AMM - 01-Feb-2020 - 12-15-38-613-001-A - Fill The Potable Water Tank System (Aircraft Electrical Power Available)nazia0% (1)
- DGCA Form 120-15 Management and Administration Evaluation - June 2019Document2 pagesDGCA Form 120-15 Management and Administration Evaluation - June 2019chougarNo ratings yet
- Elon Musk - Britannica Online EncyclopediaDocument4 pagesElon Musk - Britannica Online EncyclopediaVALENCIA, JR. ANGELITONo ratings yet
- Training Pilots For ResilienceDocument11 pagesTraining Pilots For ResilienceAlexis PadillaNo ratings yet
- AMP-16123 RNDocument14 pagesAMP-16123 RNMuhammad Bilal AfzalNo ratings yet
- Caab ANO FDTLDocument10 pagesCaab ANO FDTLdinglee1No ratings yet
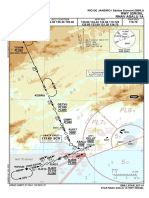
- SBRJ - Rnav Asalu 1a Rwy 02r 20l - Star - 20211202Document1 pageSBRJ - Rnav Asalu 1a Rwy 02r 20l - Star - 20211202gameplayPSNo ratings yet
- Aircraft Maintenance Engineer - Sample LetterDocument3 pagesAircraft Maintenance Engineer - Sample LetterBeing AirWindNo ratings yet
- SPQTDocument7 pagesSPQTJuan Torres VillamizarNo ratings yet
- (Yañgo) The History of TransportationDocument2 pages(Yañgo) The History of TransportationMaria Rafaella P. DadoNo ratings yet