You might also like
- New Advantages of Hydraulic DriveDocument14 pagesNew Advantages of Hydraulic DrivegawaNo ratings yet
- 1967-Sternlicht-Rotor StabilityDocument18 pages1967-Sternlicht-Rotor StabilityAlex CooperNo ratings yet
- Siddharth PosterDocument1 pageSiddharth PosterCURRENT AFFAIRS with KARANNo ratings yet
- 1967 Sternlicht Rotor StabilityDocument18 pages1967 Sternlicht Rotor StabilityAlex CooperNo ratings yet
- Turbines EnglishDocument3 pagesTurbines Englishroberto luckyNo ratings yet
- 03 Main and Tail Rotor TheoryDocument46 pages03 Main and Tail Rotor TheoryTarik Hassan ElsonniNo ratings yet
- Kesten CH 8 10.21 PDFDocument58 pagesKesten CH 8 10.21 PDFJoelCarvajalRamirezNo ratings yet
- Electrical Motor and DrivesDocument27 pagesElectrical Motor and Drivesrejujoel4655No ratings yet
- Literature Study-Burj Al Arab: Wind Load/ Lateral LoadsDocument1 pageLiterature Study-Burj Al Arab: Wind Load/ Lateral LoadsAnnie EblinNo ratings yet
- Agitated VF - Ssel!I: Yz,) 'RoDocument1 pageAgitated VF - Ssel!I: Yz,) 'RoprateekmuleNo ratings yet
- NT:CJ . !J.: ... Llf!!l!lllil!'.llDocument1 pageNT:CJ . !J.: ... Llf!!l!lllil!'.llprateekmuleNo ratings yet
- 1 Vu-Vc Where - : Gear Load. However. As Stated Above. The Drag SpinDocument1 page1 Vu-Vc Where - : Gear Load. However. As Stated Above. The Drag SpinnelsonNo ratings yet
- Design and Fabrication of Load Applied Power Generator: © JUN 2019 - IRE Journals - Volume 2 Issue 12 - ISSN: 2456-8880Document8 pagesDesign and Fabrication of Load Applied Power Generator: © JUN 2019 - IRE Journals - Volume 2 Issue 12 - ISSN: 2456-8880HusnainNo ratings yet
- CRW90 Computer VersionDocument97 pagesCRW90 Computer VersionRogelio Castillo AvalosNo ratings yet
- Design of ShaftsDocument47 pagesDesign of ShaftsTejas RaoNo ratings yet
- Choose Between Current Long-Stroke Sucker Rod Pumping SystemsDocument4 pagesChoose Between Current Long-Stroke Sucker Rod Pumping SystemsNevada Saga SusenoNo ratings yet
- FlywheelDocument6 pagesFlywheelDustin MartinNo ratings yet
- FlywheelDocument6 pagesFlywheelDustin MartinNo ratings yet
- Wound Rotor Repair Tips: Testing, Application and Failure AnalysisDocument14 pagesWound Rotor Repair Tips: Testing, Application and Failure Analysishino_kaguNo ratings yet
- On Site RTC 80130 R3K4-3399Document308 pagesOn Site RTC 80130 R3K4-3399srikanthc85No ratings yet
- Swing Fall Hazard Total Fall DistanceDocument3 pagesSwing Fall Hazard Total Fall Distanceတိုး ေဝ ေအာင္No ratings yet
- Adobe Scan 24 Jan 2023Document2 pagesAdobe Scan 24 Jan 2023Hitesh KumarNo ratings yet
- Damping in BearingDocument4 pagesDamping in BearingRavi Kishore BNo ratings yet
- Turner (1990)Document22 pagesTurner (1990)Simon YUNo ratings yet
- The Possibilities of Improving The Fatigue Durabilityof The Ship Propeller Shaft by Burnishing Proce - 55878Document17 pagesThe Possibilities of Improving The Fatigue Durabilityof The Ship Propeller Shaft by Burnishing Proce - 55878agrzonkowskiNo ratings yet
- 4.12 Tractor Stability PDFDocument4 pages4.12 Tractor Stability PDFDEEPU RATHORENo ratings yet
- Selection of Bearing Type and Form A1: Relative Movement Between Machine Components and The Constraints AppliedDocument8 pagesSelection of Bearing Type and Form A1: Relative Movement Between Machine Components and The Constraints AppliedX800XLNo ratings yet
- Taylor TX TXH TXB 180-300 Forklift Trucks Maintenance Manual PDFDocument320 pagesTaylor TX TXH TXB 180-300 Forklift Trucks Maintenance Manual PDFJaime MurilloNo ratings yet
- Design Bladed Darrieus Rotor River Turbines: StraightDocument6 pagesDesign Bladed Darrieus Rotor River Turbines: StraightBorja Garcia SastreNo ratings yet
- Steering Gear PrincipalDocument21 pagesSteering Gear PrincipaljanuarNo ratings yet
- Technical Paper-Turbine Vibration NathDocument5 pagesTechnical Paper-Turbine Vibration NathHimansu GoswamiNo ratings yet
- Link Belt Rough Terrain Cranes Spec 9d470bDocument96 pagesLink Belt Rough Terrain Cranes Spec 9d470bMauro BatalhaNo ratings yet
- Crane Rating Manual HTC - 8690: For Sales Use OnlyDocument55 pagesCrane Rating Manual HTC - 8690: For Sales Use OnlyOscar JimenezNo ratings yet
- Settling With Power: Front Range HelicoptersDocument16 pagesSettling With Power: Front Range HelicoptersFemi AgbanaNo ratings yet
- 4.12 Tractor StabilityDocument4 pages4.12 Tractor Stabilityniloy_67No ratings yet
- Turn A Ship On The Spot Without Using The Rudder!Document4 pagesTurn A Ship On The Spot Without Using The Rudder!AVINASH ANAND RAONo ratings yet
- Unit 1Document15 pagesUnit 1Jabash SamuelNo ratings yet
- MSD Tech ArticleDocument6 pagesMSD Tech ArticleEdgar Aponte RodriguezNo ratings yet
- Modern VVVF DriveDocument8 pagesModern VVVF Drivepraba_343No ratings yet
- Comparison Between Pelton-Francis and KaplanDocument1 pageComparison Between Pelton-Francis and Kaplanmostafa gadelrabNo ratings yet
- Differential & Propeller ShaftDocument15 pagesDifferential & Propeller ShaftSrinath RausNo ratings yet
- Three-Dimensionality of The Wake Recovery Behind A Vertical Axis Turbine PDFDocument12 pagesThree-Dimensionality of The Wake Recovery Behind A Vertical Axis Turbine PDFJiyong LeeNo ratings yet
- CranesDocument6 pagesCranesSaleemAhmadMalikNo ratings yet
- Driveshaft AngleDocument10 pagesDriveshaft AnglefrazNo ratings yet
- Monera - John Philip M - Learning Activity 5 - Ee Elective 1Document3 pagesMonera - John Philip M - Learning Activity 5 - Ee Elective 1John Philip MoneraNo ratings yet
- Turbines and PumpDocument17 pagesTurbines and PumpMary Judy GabisanNo ratings yet
- Couplings: Torque Converters and HydraulicDocument2 pagesCouplings: Torque Converters and Hydraulicajkbro8No ratings yet
- Article 69Document5 pagesArticle 69Krishna P. YadavNo ratings yet
- HFH ch11 PDFDocument24 pagesHFH ch11 PDFharkesh yadavNo ratings yet
- Choose Between Long-Stroke Sucker Rod Pumping Systems.: September 2015Document5 pagesChoose Between Long-Stroke Sucker Rod Pumping Systems.: September 2015Mohanad HussienNo ratings yet
- HOP Alancing Olerances: Ractical UideDocument7 pagesHOP Alancing Olerances: Ractical UideAlex CarmonaNo ratings yet
- 6 Crank Gears: 6 .1 Crankshaft DriveDocument34 pages6 Crank Gears: 6 .1 Crankshaft DrivemoonNo ratings yet
- An Approach To The Assessment of Tractor Stability On Rough Sloping GroundDocument8 pagesAn Approach To The Assessment of Tractor Stability On Rough Sloping GroundSergey ZlenkoNo ratings yet
- Presentation 1Document73 pagesPresentation 1Rajib DebnathNo ratings yet
- The Effect of Positive Pitch-Flap Coupling (Negative On Rotor Blade Motion Stability and FlappingDocument19 pagesThe Effect of Positive Pitch-Flap Coupling (Negative On Rotor Blade Motion Stability and FlappingYonghui XUNo ratings yet
- Inventor Title Referenc e DescriptionDocument8 pagesInventor Title Referenc e DescriptionRab Bel As J.No ratings yet
- 13 T SeperatorDocument4 pages13 T SeperatorMPS PSKNo ratings yet
- The Instant Handbook of Boat Handling, Navigation, and Seamanship: A Quick-Reference Guide for Sail and PowerFrom EverandThe Instant Handbook of Boat Handling, Navigation, and Seamanship: A Quick-Reference Guide for Sail and PowerRating: 5 out of 5 stars5/5 (1)
- Farm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsFrom EverandFarm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsNo ratings yet
- 1402 Emergence of Computational Fluid Dynamics at Imperial College 1965-1975 A Personal Recollection 2013 RunchalDocument10 pages1402 Emergence of Computational Fluid Dynamics at Imperial College 1965-1975 A Personal Recollection 2013 RunchalMariela TisseraNo ratings yet
- 458 Application - of - The - Craig-Bampton - Method - To - Blade - Rotation LEORODocument10 pages458 Application - of - The - Craig-Bampton - Method - To - Blade - Rotation LEOROMariela TisseraNo ratings yet
- Wind Turbine Brake Fayette US4715782Document9 pagesWind Turbine Brake Fayette US4715782Mariela TisseraNo ratings yet
- 412 Improved Modal Dynamics of Wind Turbines To Avoid Stall Induced Vibrations (2003) HANSENDocument17 pages412 Improved Modal Dynamics of Wind Turbines To Avoid Stall Induced Vibrations (2003) HANSENMariela TisseraNo ratings yet
- Frequency and Vibration Problems of Rotors Prewitt, R. H. - (1940)Document7 pagesFrequency and Vibration Problems of Rotors Prewitt, R. H. - (1940)Mariela TisseraNo ratings yet
- Wrigth Flying Machine 1906 Patent Us821393Document10 pagesWrigth Flying Machine 1906 Patent Us821393Mariela TisseraNo ratings yet
- Landing Characteristics of An Autogiro Feck 1934 19930081285Document22 pagesLanding Characteristics of An Autogiro Feck 1934 19930081285Mariela TisseraNo ratings yet
- Wallis Pag3 1966 - 0901Document1 pageWallis Pag3 1966 - 0901Mariela TisseraNo ratings yet
- Notes On Derivation of Empirical Charts For Calculation of Rotor Blades Nikolsky 1959 Ada952031Document16 pagesNotes On Derivation of Empirical Charts For Calculation of Rotor Blades Nikolsky 1959 Ada952031Mariela TisseraNo ratings yet
- Aeroelastic Model Helicopter Rotor Testing in The Langley TDT Wayne Yeager 1985 19860002056Document19 pagesAeroelastic Model Helicopter Rotor Testing in The Langley TDT Wayne Yeager 1985 19860002056Mariela TisseraNo ratings yet
- MTO Autogyro Rotor Blade Inspection AG-SIL-2019-03-B-EN-Rotor-Blade-InspectionDocument6 pagesMTO Autogyro Rotor Blade Inspection AG-SIL-2019-03-B-EN-Rotor-Blade-InspectionMariela TisseraNo ratings yet
- The Influence of Wing Setting On The Wing Load and Rotor Speed of Pca-2 Autogiro NACA-report-523Document4 pagesThe Influence of Wing Setting On The Wing Load and Rotor Speed of Pca-2 Autogiro NACA-report-523Mariela TisseraNo ratings yet
- Patente Aircraft With Rotative Wings Cierva 1928 Us1692081Document3 pagesPatente Aircraft With Rotative Wings Cierva 1928 Us1692081Mariela TisseraNo ratings yet
- Wallis Pag2 1966 - 0900Document1 pageWallis Pag2 1966 - 0900Mariela TisseraNo ratings yet
- Evaluation of The Induced Velocity Field of An Idealized Helicopter Rotor Coleman Feingold Stempin 1945 Filete 19930093086Document27 pagesEvaluation of The Induced Velocity Field of An Idealized Helicopter Rotor Coleman Feingold Stempin 1945 Filete 19930093086Mariela TisseraNo ratings yet
- Study of Feasibility and Exactness For The Mathematical "Semirigid" Nonlinear Model of I. Nikolaev, E. N. Antoshkina 2012 PDFDocument9 pagesStudy of Feasibility and Exactness For The Mathematical "Semirigid" Nonlinear Model of I. Nikolaev, E. N. Antoshkina 2012 PDFMariela TisseraNo ratings yet
- Wallis Pag1 1966 - 0899Document1 pageWallis Pag1 1966 - 0899Mariela TisseraNo ratings yet
- (Aircraft Engineering and Aerospace Technology 1934-Jan Vol. 6 Iss. 1) - The Direct Control Autogiro (1934) (10.1108 - Eb029765) - Libgen - LiDocument2 pages(Aircraft Engineering and Aerospace Technology 1934-Jan Vol. 6 Iss. 1) - The Direct Control Autogiro (1934) (10.1108 - Eb029765) - Libgen - LiMariela TisseraNo ratings yet
- Karl Ludvigsen - Juan Manuel Fangio - Motor Racing's Grand MasterDocument98 pagesKarl Ludvigsen - Juan Manuel Fangio - Motor Racing's Grand MasterMariela TisseraNo ratings yet
- STANDARD SPECIFICATION FOR DESIGN AND PERFORMANCE OF LIGHT SPORT GYROPLANE AIRCRAFT 1 - 2020122309300880c75Document17 pagesSTANDARD SPECIFICATION FOR DESIGN AND PERFORMANCE OF LIGHT SPORT GYROPLANE AIRCRAFT 1 - 2020122309300880c75Mariela TisseraNo ratings yet
- LIBRO Modifying - Production.cylinder - Heads.-.Clive - Trickey (Porting, FILETE FILETEDocument27 pagesLIBRO Modifying - Production.cylinder - Heads.-.Clive - Trickey (Porting, FILETE FILETEMariela TisseraNo ratings yet
- Underslung Rotor DesignDocument4 pagesUnderslung Rotor DesignMariela TisseraNo ratings yet
- The Gyroplane Breguet, Louis - (1937)Document36 pagesThe Gyroplane Breguet, Louis - (1937)Mariela Tissera100% (1)
- 103 User S Guide For The Nrel Force and Loads Analysis Program (Flap) Version 2 - 2 1992 Con Listado 4674Document238 pages103 User S Guide For The Nrel Force and Loads Analysis Program (Flap) Version 2 - 2 1992 Con Listado 4674Mariela TisseraNo ratings yet
- Visualizing The History of Energy TransitionsDocument9 pagesVisualizing The History of Energy TransitionsMariela TisseraNo ratings yet
- 114 Bladed Software Theory Manual 2003 Garrad HassanDocument88 pages114 Bladed Software Theory Manual 2003 Garrad HassanMariela TisseraNo ratings yet
- Aristarchus of Samos - On The Sizes and Distances of The Sun and Moon - Greek Text, Translation, Analysis Christián C. Carman, Rodolfo P. BuzónDocument326 pagesAristarchus of Samos - On The Sizes and Distances of The Sun and Moon - Greek Text, Translation, Analysis Christián C. Carman, Rodolfo P. BuzónMariela TisseraNo ratings yet
- Glauert, H. - The Use of Small Wind Tunnels in Aeroplane Design (1931) (10.1017 - s0368393100115809) - Libgen - LiDocument24 pagesGlauert, H. - The Use of Small Wind Tunnels in Aeroplane Design (1931) (10.1017 - s0368393100115809) - Libgen - LiMariela TisseraNo ratings yet
- DilutionDocument42 pagesDilutionEltac AbbasovaNo ratings yet
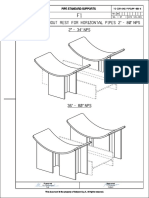
- Axial Stop Without Rest For Horizontal Pipes 2" - 80" NPS: Pipe Standard SupportsDocument4 pagesAxial Stop Without Rest For Horizontal Pipes 2" - 80" NPS: Pipe Standard SupportsMainuddin AliNo ratings yet
- EWAVR AssemblerReferenceDocument122 pagesEWAVR AssemblerReferencepak_engNo ratings yet
- FMPTDocument1 pageFMPTsomujazNo ratings yet
- Features / BenefitsDocument54 pagesFeatures / Benefitsomar.ash8888No ratings yet
- R112 114 116 - 7575392 040Document538 pagesR112 114 116 - 7575392 040Ahmet80% (5)
- Xpert Opinions Composite Repairs FinalDocument10 pagesXpert Opinions Composite Repairs Finalyrdna nawaiteosNo ratings yet
- Hydrolysis Acetanilide.: Univ RsityDocument11 pagesHydrolysis Acetanilide.: Univ RsityShahen GyanNo ratings yet
- Mix Design Formula & Formet 857Document7 pagesMix Design Formula & Formet 857Bilal Ahmed BarbhuiyaNo ratings yet
- CCLesson10 DIY Gamer Lessonplan New1Document20 pagesCCLesson10 DIY Gamer Lessonplan New1asmonovNo ratings yet
- SGGP Reference No: P0116-TAK-P01-0071-02Document20 pagesSGGP Reference No: P0116-TAK-P01-0071-02Jabel Oil Services Technical DPTNo ratings yet
- Repsol Isplen Pr210x6eDocument2 pagesRepsol Isplen Pr210x6eSérgio BarbosaNo ratings yet
- 1999 On The Shakedown Analysis of Nozzles Using Elasto-Plastic FEADocument14 pages1999 On The Shakedown Analysis of Nozzles Using Elasto-Plastic FEABib GmzNo ratings yet
- Canopen GatewaysDocument202 pagesCanopen GatewaysBogdan Formagiu100% (1)
- UCCX 7.x Admin GuideDocument596 pagesUCCX 7.x Admin GuideGaurav DeodharNo ratings yet
- East Raya GardenDocument30 pagesEast Raya Gardenchrisjean0% (1)
- General Instruments SpecificationsDocument44 pagesGeneral Instruments Specificationsavinash1109No ratings yet
- LCR MeterDocument2 pagesLCR Meterhungphuc2010No ratings yet
- Dom MCQ QuestionDocument5 pagesDom MCQ QuestionRamaswamy SubbiahNo ratings yet
- Data Sheet 4NC5225-2CE20: Show Actual Product DetailsDocument2 pagesData Sheet 4NC5225-2CE20: Show Actual Product Detailssherub wangdiNo ratings yet
- BMC - Building ComponentsDocument3 pagesBMC - Building Componentsসন্দীপ চন্দ্রNo ratings yet
- Truck Total Vehicle Actros, Type 930-934 Introductory Training Final TestDocument10 pagesTruck Total Vehicle Actros, Type 930-934 Introductory Training Final TestengdistyaNo ratings yet
- Design of Steel and Timber StructuresDocument6 pagesDesign of Steel and Timber StructuresYi MokNo ratings yet
- Audi Specialist Rochdale - Google SearchDocument1 pageAudi Specialist Rochdale - Google Searchshoplife141No ratings yet
- Khtek Da1196H: 24bit, 192Khz 6-Channel Digital To Audio ConverterDocument11 pagesKhtek Da1196H: 24bit, 192Khz 6-Channel Digital To Audio ConvertervetchboyNo ratings yet
- Piping Codes List of Piping Codes Is HereDocument8 pagesPiping Codes List of Piping Codes Is Hereabidaliabid1No ratings yet
- ASS Build Wika WerefedDocument2 pagesASS Build Wika WerefedXZXDEATHNo ratings yet
- Linear Programming: Chapter 13 SupplementDocument35 pagesLinear Programming: Chapter 13 SupplementDevharsh TrivediNo ratings yet
- Service Manual: EPSON Stylus PHOTO 890/1280/1290Document205 pagesService Manual: EPSON Stylus PHOTO 890/1280/1290Антон РуслановNo ratings yet