You might also like
- Homework 4 Coursera 07 PDFDocument11 pagesHomework 4 Coursera 07 PDFPrabhatMishra100% (7)
- Workshop 4 - Draft2Document6 pagesWorkshop 4 - Draft2Saatwick MathurNo ratings yet
- Avinash K. Dixit) Optimization in Economic Theory (BookFi - Org) - 1Document101 pagesAvinash K. Dixit) Optimization in Economic Theory (BookFi - Org) - 1presi_studentNo ratings yet
- CCC 2008 2Document5 pagesCCC 2008 2Elleuch DorsafNo ratings yet
- Design of Stable Fuzzy Controllers For An AGVDocument8 pagesDesign of Stable Fuzzy Controllers For An AGVMihai Alexandru OlaruNo ratings yet
- Adaptive Terminal Sliding Mode Control For Rigid Robotic ManipulatorsDocument6 pagesAdaptive Terminal Sliding Mode Control For Rigid Robotic ManipulatorsRuben RaygosaNo ratings yet
- Adams or Simulink - Slider CrankDocument4 pagesAdams or Simulink - Slider CrankAbhilashUNNo ratings yet
- Adaptive PID With Sliding Mode Control For The Rotary InvertedDocument6 pagesAdaptive PID With Sliding Mode Control For The Rotary InvertedImee RistikaNo ratings yet
- Robust Controller Design For Uncertain Systems: Shreesha.c@manipal - EduDocument4 pagesRobust Controller Design For Uncertain Systems: Shreesha.c@manipal - EduInnovative Research PublicationsNo ratings yet
- Robot Manipulator Modeling in Matlab-Simmechanics With PD Control and Online Gravity CompensationDocument5 pagesRobot Manipulator Modeling in Matlab-Simmechanics With PD Control and Online Gravity CompensationBruceNo ratings yet
- Robust Adaptive Controller Design For Excavator Arm: Nga Thi-Thuy VuDocument6 pagesRobust Adaptive Controller Design For Excavator Arm: Nga Thi-Thuy VuAsif SaleemNo ratings yet
- Dennis Jin Development of A Stable Control System For A SegwayDocument25 pagesDennis Jin Development of A Stable Control System For A SegwayIsrael JosueNo ratings yet
- Control of Two-Wheels Inverted Pendulum Mobile Robot Using Full Order Sliding Mode ControlDocument6 pagesControl of Two-Wheels Inverted Pendulum Mobile Robot Using Full Order Sliding Mode Controlc0d3rNo ratings yet
- MMARDocument6 pagesMMARManar HosnyNo ratings yet
- Design of A Non-Linear Hybrid Car Suspension System Using Neural NetworksDocument10 pagesDesign of A Non-Linear Hybrid Car Suspension System Using Neural NetworksEmir AcevedoNo ratings yet
- Modelling and Simulation of Inverted Pendulum Using Internal Model ControlDocument5 pagesModelling and Simulation of Inverted Pendulum Using Internal Model ControlJournal 4 ResearchNo ratings yet
- International Journal of Information Technology, Control and Automation (IJITCA)Document18 pagesInternational Journal of Information Technology, Control and Automation (IJITCA)ijitcaNo ratings yet
- PID Control Dynamics of A Robotic Arm Manipulator With Two Degrees of Freedom.Document7 pagesPID Control Dynamics of A Robotic Arm Manipulator With Two Degrees of Freedom.David Isai Robles Gonzalez100% (1)
- Multiobjective Control Systems Design by Genetic AlgorithmsDocument6 pagesMultiobjective Control Systems Design by Genetic AlgorithmsnainaNo ratings yet
- Adaptive Terminal Sliding Mode Control For Rigid Robotic ManipulatorsDocument6 pagesAdaptive Terminal Sliding Mode Control For Rigid Robotic Manipulatorssuveer kumarNo ratings yet
- Anti-Sway Tracking Control of Overhead Crane Fuzzy SMCDocument12 pagesAnti-Sway Tracking Control of Overhead Crane Fuzzy SMCDiegostfNo ratings yet
- Positioning Control of One Link Arm With Parametric Uncertainty Using Quantitative Feedback TheoryDocument10 pagesPositioning Control of One Link Arm With Parametric Uncertainty Using Quantitative Feedback TheorySenthil KumarNo ratings yet
- Internal ModelDocument15 pagesInternal ModelDiego RamirezNo ratings yet
- Ica20110200012 71434152Document7 pagesIca20110200012 71434152Lê Tuấn MinhNo ratings yet
- ROBUST CONTROLLER DESIGN FOR IMAGE BASED VISUAL TRA - 2007 - IFAC Proceedings VoDocument6 pagesROBUST CONTROLLER DESIGN FOR IMAGE BASED VISUAL TRA - 2007 - IFAC Proceedings VosmeykelNo ratings yet
- Control of Inverted PendulumDocument33 pagesControl of Inverted PendulumMohammad Umar RehmanNo ratings yet
- Two Link Robot ArmDocument8 pagesTwo Link Robot ArmgadaNo ratings yet
- e-ISSN: 2320-0847 p-ISSN: 2320-0936 Volume-02, Issue-12, pp-75-82Document8 pagese-ISSN: 2320-0847 p-ISSN: 2320-0936 Volume-02, Issue-12, pp-75-82AJER JOURNALNo ratings yet
- Control ReportDocument15 pagesControl ReportKenshow Large50% (2)
- Angular Motion Estimation Using Dynamic ModelsDocument18 pagesAngular Motion Estimation Using Dynamic ModelssumathyNo ratings yet
- Gantry Crane System ModellingDocument8 pagesGantry Crane System ModellingEbrahim AbdulfattahNo ratings yet
- Fuzzy Sliding Mode Controller (FSMC) With Global Stabilization and Saturation Function For Tracking Control of A Robotic ManipulatorDocument7 pagesFuzzy Sliding Mode Controller (FSMC) With Global Stabilization and Saturation Function For Tracking Control of A Robotic ManipulatormaryfghNo ratings yet
- Catt Technical Report No. 02-02-01: Adaptive Sliding Mode Control Design For A Hypersonic Flight VehicleDocument16 pagesCatt Technical Report No. 02-02-01: Adaptive Sliding Mode Control Design For A Hypersonic Flight VehicleDivya KrishnanNo ratings yet
- Experiment On Servo Positioning ControlDocument9 pagesExperiment On Servo Positioning ControlPinaki SankarNo ratings yet
- 1 - 15 PDFDocument15 pages1 - 15 PDFknightfelix12100% (1)
- 1 From Classical Control To Fuzzy Logic ControlDocument15 pages1 From Classical Control To Fuzzy Logic Controlknightfelix12No ratings yet
- Unicycle RobotDocument45 pagesUnicycle RobotSAN JUAN BAUTISTANo ratings yet
- Homework #1: Hint: You Can Use The Matlab Function Polyval To Evaluate The Numerator and DenominatorDocument3 pagesHomework #1: Hint: You Can Use The Matlab Function Polyval To Evaluate The Numerator and DenominatorMuhammed Hasan GUCLUNo ratings yet
- Analysis of Autopilot System IntegratedDocument11 pagesAnalysis of Autopilot System Integratedrbbudino0410No ratings yet
- An Integral Sliding Mode Control Design For A Class of Underactuated Motion SystemsDocument6 pagesAn Integral Sliding Mode Control Design For A Class of Underactuated Motion Systemscranker117No ratings yet
- 5-DOF Manipulator Simulation Based On MATLAB Simulink MethodologyDocument6 pages5-DOF Manipulator Simulation Based On MATLAB Simulink MethodologyCh RajaNo ratings yet
- CS W4 EV3 v2 PDFDocument3 pagesCS W4 EV3 v2 PDFhamalNo ratings yet
- 5586 18241 1 PBDocument9 pages5586 18241 1 PBNguyễn Đức HuyNo ratings yet
- Sciendo: Nonlinear PD Plus Sliding Mode Control With Application To A Parallel Delta RobotDocument8 pagesSciendo: Nonlinear PD Plus Sliding Mode Control With Application To A Parallel Delta RobotĐức QuangNo ratings yet
- Robust H Controller For Construction Elevator Drivesystem Vibrations AttenuatorDocument9 pagesRobust H Controller For Construction Elevator Drivesystem Vibrations AttenuatorDr Saba TareqNo ratings yet
- M. W Dunnigan: Department Oj Computing and Electrical Engineering, Heriot-Watt University, Edinburgh, ScotlandDocument13 pagesM. W Dunnigan: Department Oj Computing and Electrical Engineering, Heriot-Watt University, Edinburgh, ScotlandVictor PassosNo ratings yet
- Icee2022 BousbiaDocument8 pagesIcee2022 BousbiaDjedili AmelNo ratings yet
- 1 s2.0 S0921889005001417 ANGPCRMCTRDDocument10 pages1 s2.0 S0921889005001417 ANGPCRMCTRDAngel Hernandez VelascoNo ratings yet
- Esign For A: AbstractDocument5 pagesEsign For A: Abstractsattanic666No ratings yet
- Comparative Analysis of Tuning Missile Autopilots Using Intelligent MethodsDocument8 pagesComparative Analysis of Tuning Missile Autopilots Using Intelligent MethodsDiamoundDomeProgram R&DNo ratings yet
- Output-Feedback Control of Container Cranes: A Comparative AnalysisDocument16 pagesOutput-Feedback Control of Container Cranes: A Comparative AnalysisjavbejaranoNo ratings yet
- PID Vs LQ Control Techniques Applied To An Indoor Micro QuadrotorDocument6 pagesPID Vs LQ Control Techniques Applied To An Indoor Micro QuadrotorAlexandreSidantNo ratings yet
- 56 421Document10 pages56 421nguyendattdhNo ratings yet
- Anti-Swing Control For An Overhead Crane With Fuzzy Compensation X L, W YDocument11 pagesAnti-Swing Control For An Overhead Crane With Fuzzy Compensation X L, W Ytidjani86No ratings yet
- Diseño de Control Óptimo No Lineal para Plataforma Móvil de Péndulo Invertido de Dos Ruedas SubactuadaDocument6 pagesDiseño de Control Óptimo No Lineal para Plataforma Móvil de Péndulo Invertido de Dos Ruedas SubactuadaJose Carlos Fabian Mamani VilcapazaNo ratings yet
- Designing A Neuro PD With Gravity Compensation For Six Legged RobotDocument8 pagesDesigning A Neuro PD With Gravity Compensation For Six Legged RobotVishwanath KetkarNo ratings yet
- Optimal PID Controller Design of An Inverted Pendulum Dynamics A Hybrid Pole-Placement and Firefly Algorithm ApproachDocument6 pagesOptimal PID Controller Design of An Inverted Pendulum Dynamics A Hybrid Pole-Placement and Firefly Algorithm ApproachAraceli CastruitaNo ratings yet
- Active Suspension System For Heavy VehiclesDocument5 pagesActive Suspension System For Heavy VehiclesandersonNo ratings yet
- Design of Optimal PID Controller For Inverted Pendulum Using Genetic AlgorithmDocument3 pagesDesign of Optimal PID Controller For Inverted Pendulum Using Genetic AlgorithmPhuongle LeNo ratings yet
- 146 562 1 PB PDFDocument5 pages146 562 1 PB PDFirqoviNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Bernoulli's Equation: Dy Pxy Qxy N N DXDocument13 pagesBernoulli's Equation: Dy Pxy Qxy N N DXZulqarnain KhanNo ratings yet
- Introduction of Control EngineeringDocument21 pagesIntroduction of Control EngineeringAshvani ShuklaNo ratings yet
- Stochastic Process Modified - 2Document11 pagesStochastic Process Modified - 2IMdad HaqueNo ratings yet
- A2 2D Computational Heat ConductionDocument4 pagesA2 2D Computational Heat ConductionKaushikKulkarni0% (1)
- SIUE Exit ExamDocument9 pagesSIUE Exit ExamXXXXNo ratings yet
- Dynamic Analysis: T F KX X C X MDocument9 pagesDynamic Analysis: T F KX X C X MRed JohnNo ratings yet
- Blennow M Solutions Manual For Mathematical Methods For PhysDocument348 pagesBlennow M Solutions Manual For Mathematical Methods For PhysStrahinja DonicNo ratings yet
- Lecture 12: Public-Key Cryptography and The RSA Algorithm Lecture Notes On "Computer and Network Security"Document90 pagesLecture 12: Public-Key Cryptography and The RSA Algorithm Lecture Notes On "Computer and Network Security"Anshu MittalNo ratings yet
- LP-II Oral QuestionsDocument2 pagesLP-II Oral QuestionsTECHMASTER HUBNo ratings yet
- Classification - Decision TreesDocument43 pagesClassification - Decision Trees2023aa05902No ratings yet
- NETS NYPS (68 Bus System) ANAREDE PacDyn ANATEM Study ReportDocument48 pagesNETS NYPS (68 Bus System) ANAREDE PacDyn ANATEM Study Reportflywheel2006No ratings yet
- Fakespotter: A Simple Yet Robust Baseline For Spotting Ai-Synthesized Fake FacesDocument8 pagesFakespotter: A Simple Yet Robust Baseline For Spotting Ai-Synthesized Fake FacesAmol SinhaNo ratings yet
- IAT Paper Jan-June 22 DMBI DIV A&B SolutionDocument10 pagesIAT Paper Jan-June 22 DMBI DIV A&B SolutionAnirudh TripathiNo ratings yet
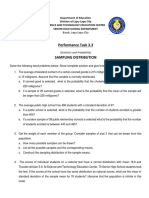
- Performance Task - Q3-3Document2 pagesPerformance Task - Q3-3Atasha Nicole G. BahandeNo ratings yet
- Chapter 3 - Forced Vibration of Multi-Degree-of-Freedom SystemsDocument4 pagesChapter 3 - Forced Vibration of Multi-Degree-of-Freedom SystemsAnonymous LcR6ykPBTNo ratings yet
- Fraud Detection System: - Nikita Lawande - Prakarsha Dahat - Riya ThakurDocument14 pagesFraud Detection System: - Nikita Lawande - Prakarsha Dahat - Riya ThakurackrinNo ratings yet
- Group 1Document37 pagesGroup 1Christian Felix GuevarraNo ratings yet
- A Combination of Mathematics, Statistics and Machine Learning To Detect FraudDocument4 pagesA Combination of Mathematics, Statistics and Machine Learning To Detect FraudMd. KowsherNo ratings yet
- 2F4Y: Molecular Structure and Energy Levels Formula Sheet Topic 1: Quantum MechanicsDocument2 pages2F4Y: Molecular Structure and Energy Levels Formula Sheet Topic 1: Quantum Mechanicsapi-250366166No ratings yet
- Linear EquationsDocument2 pagesLinear Equationsindian2013No ratings yet
- Sinha-Dhanalakshmi2019 Article EvolutionOfRecommenderSystemOv PDFDocument20 pagesSinha-Dhanalakshmi2019 Article EvolutionOfRecommenderSystemOv PDFRui MatosNo ratings yet
- Transform Operator Random Generator Delimiter Based Encryption Standard (TORDES)Document4 pagesTransform Operator Random Generator Delimiter Based Encryption Standard (TORDES)Ajay ChaudharyNo ratings yet
- This Study Resource Was: A. Simple InterestDocument4 pagesThis Study Resource Was: A. Simple InterestCarmel YparraguirreNo ratings yet
- Syl MSC Physics 2212Document53 pagesSyl MSC Physics 2212Aaron DmcNo ratings yet
- chap3E-Divide and ConquerDocument21 pageschap3E-Divide and ConquerThùy Linh VũNo ratings yet
- A N Algorithm For Linearly Constrained Adaptive ProcessingDocument10 pagesA N Algorithm For Linearly Constrained Adaptive ProcessingMayssa RjaibiaNo ratings yet
- Game TheoryDocument28 pagesGame Theoryshreya5319100% (1)
- 9 ArimaDocument200 pages9 ArimajuanivazquezNo ratings yet