You might also like
- Shock and Vibration Analysis Using Ansys MechanicalDocument54 pagesShock and Vibration Analysis Using Ansys MechanicalVijendraAgar100% (1)
- 7 - Rock Slope StabiltyDocument20 pages7 - Rock Slope StabiltySaeed KhanNo ratings yet
- Mixing and Agitation 93851 - 10 ADocument19 pagesMixing and Agitation 93851 - 10 Aakarcz6731No ratings yet
- Slope Stability Analysis: Presented By: Engr. Kyle Emmanuel R. Murillo, CE, RMPDocument41 pagesSlope Stability Analysis: Presented By: Engr. Kyle Emmanuel R. Murillo, CE, RMPRenee AlcantaraNo ratings yet
- Stability of Rock Slopes: Dr. R.S.Banshtu Associate Professor Civil Engineering Department NIT HamirpurDocument89 pagesStability of Rock Slopes: Dr. R.S.Banshtu Associate Professor Civil Engineering Department NIT HamirpurAastha SoniNo ratings yet
- Ginger Final Report FIGTF 02Document80 pagesGinger Final Report FIGTF 02Nihmathullah Kalanther Lebbe100% (2)
- Session 11 - Circular FailureDocument36 pagesSession 11 - Circular FailureNicolás SilvaNo ratings yet
- UntitledDocument595 pagesUntitledMartinusNo ratings yet
- Slope Stability OverviewDocument6 pagesSlope Stability OverviewmizzsheraNo ratings yet
- Slope Stability AnalysisDocument7 pagesSlope Stability AnalysisBindu SrirangamNo ratings yet
- Stability of SlopesDocument34 pagesStability of Slopessunny100% (1)
- Limiting Equilibrium Slope Stability AnalysisDocument40 pagesLimiting Equilibrium Slope Stability AnalysisReni CandelierNo ratings yet
- Slope Stability AnalysisDocument32 pagesSlope Stability AnalysisHồng NgôNo ratings yet
- Lec6 - Rock Slope StabilityDocument39 pagesLec6 - Rock Slope StabilityHarry PiyoNo ratings yet
- Ch10 Slope Stability 2Document32 pagesCh10 Slope Stability 2rafiNo ratings yet
- Mark Magazine#65Document196 pagesMark Magazine#65AndrewKanischevNo ratings yet
- Stewart, Mary - The Little BroomstickDocument159 pagesStewart, Mary - The Little BroomstickYunon100% (1)
- Deformation Geometry for Materials Scientists: International Series on Materials Science and TechnologyFrom EverandDeformation Geometry for Materials Scientists: International Series on Materials Science and TechnologyRating: 5 out of 5 stars5/5 (1)
- Slope Stability AnalysisDocument16 pagesSlope Stability AnalysisRajesh KhadkaNo ratings yet
- Wedge Failure - Slope Stability Analysis in RockDocument22 pagesWedge Failure - Slope Stability Analysis in Rockchaymaa MRHAR100% (1)
- N2 V Operare ManualDocument370 pagesN2 V Operare Manualramiro0001No ratings yet
- Introduction To Slope Stability AnalysisDocument102 pagesIntroduction To Slope Stability Analysisshykojcrsa100% (1)
- 19 Stability of SlopesDocument103 pages19 Stability of SlopesUmara NasirNo ratings yet
- Chapt 11a Rock MechanicsokDocument21 pagesChapt 11a Rock MechanicsokMarcelo Ayllón RiberaNo ratings yet
- Fault and Joint Development: In Brittle and Semi-Brittle RockFrom EverandFault and Joint Development: In Brittle and Semi-Brittle RockNo ratings yet
- Kuliah 12 PASCA SARJANA 2019 - 2020 GANJIL UBDDocument44 pagesKuliah 12 PASCA SARJANA 2019 - 2020 GANJIL UBDDr. S. K. Nava NavaratnarajahNo ratings yet
- Stability of SlopesDocument72 pagesStability of SlopesAliNo ratings yet
- Elements of Slope Stability Analysis: Retaining StructuresDocument22 pagesElements of Slope Stability Analysis: Retaining StructureskorbiNo ratings yet
- Comparison of Slope Stability Using Smoothed Particle Hydrodynamics, Finite Element Method, and Limit Equilibrium MethodDocument16 pagesComparison of Slope Stability Using Smoothed Particle Hydrodynamics, Finite Element Method, and Limit Equilibrium MethodDCCT BMNo ratings yet
- Expression of Stress and StrainDocument38 pagesExpression of Stress and StrainAlly TNo ratings yet
- Bai Giang Cua Giao Su Tien Si Fredlund (Canada)Document40 pagesBai Giang Cua Giao Su Tien Si Fredlund (Canada)khoiquyenvnNo ratings yet
- Module 2 - Slope Stability Analysis (2D & 3D)Document81 pagesModule 2 - Slope Stability Analysis (2D & 3D)Irfandi Oky PermanaNo ratings yet
- Topic 3 Rock Slope Stability Analysis Using Kinematic MethodDocument55 pagesTopic 3 Rock Slope Stability Analysis Using Kinematic MethodDecho PhueakphumNo ratings yet
- Solid Mechanics SlidesDocument109 pagesSolid Mechanics SlidesYash TiwariNo ratings yet
- Module 4 - Material Models in SlideDocument128 pagesModule 4 - Material Models in SlideIrfandi Oky PermanaNo ratings yet
- A Comparison Between Limit Equilibrium and Finite Element Methods For Slope Stability AnalysisDocument18 pagesA Comparison Between Limit Equilibrium and Finite Element Methods For Slope Stability AnalysisGabriel ArirupaNo ratings yet
- Geometry of Deformation 1: Last Class-ContactsDocument11 pagesGeometry of Deformation 1: Last Class-ContactsRMNo ratings yet
- Strike-Slip and Oblique-Slip TectonicsDocument21 pagesStrike-Slip and Oblique-Slip TectonicsMAULANANo ratings yet
- CCE 2312-Soil Mechanics II-slides 57-88Document34 pagesCCE 2312-Soil Mechanics II-slides 57-88MultimediaUniversityCivil EngineeringNo ratings yet
- Rock Slope Stability Analysis Incorporating The Effects of Intermediate Principal StressDocument19 pagesRock Slope Stability Analysis Incorporating The Effects of Intermediate Principal StressAvijit BurmanNo ratings yet
- Slope Stability Analysis FoSDocument6 pagesSlope Stability Analysis FoSkrainajackaNo ratings yet
- Slopestability Analysis2Document115 pagesSlopestability Analysis2SilentdNo ratings yet
- General Use and Applicability of Slope Stability ChartsDocument6 pagesGeneral Use and Applicability of Slope Stability ChartsLekhani DasanayakeNo ratings yet
- Ground Investigation and MethodDocument54 pagesGround Investigation and MethodAprillia As JollyNo ratings yet
- Slope Stability Part 2 - Dewangan SirDocument87 pagesSlope Stability Part 2 - Dewangan SirAnshul yadavNo ratings yet
- Beng-Soil Mechanics IB-Slides 57-88Document34 pagesBeng-Soil Mechanics IB-Slides 57-88Tom WhanNo ratings yet
- Lecture 4 - ShearDocument11 pagesLecture 4 - ShearMonique AldanaNo ratings yet
- Soil Mechanics Ii-Ecv 308: Bachelor of Science in Civil EngineeringDocument33 pagesSoil Mechanics Ii-Ecv 308: Bachelor of Science in Civil EngineeringGarol BaveriaNo ratings yet
- Theory of Elasticity: Tutor: Dr. Owaisur Rahman ShahDocument139 pagesTheory of Elasticity: Tutor: Dr. Owaisur Rahman ShahMansoob BukhariNo ratings yet
- Slope InstabilityDocument37 pagesSlope InstabilityGorkem AktasNo ratings yet
- Bridge-Design of Shallow FoundationsDocument35 pagesBridge-Design of Shallow FoundationsmikadituNo ratings yet
- Represents Site Sub Surface Conditions, Ground Ane: Safe and Economic Design of Excavations, EmbankmentsDocument45 pagesRepresents Site Sub Surface Conditions, Ground Ane: Safe and Economic Design of Excavations, Embankmentsapna indiaNo ratings yet
- 1macem2020 06 09Document4 pages1macem2020 06 09ichsanalfanNo ratings yet
- Three-Dimensional Reliability Analysis of Earth SlopesDocument17 pagesThree-Dimensional Reliability Analysis of Earth SlopesbryanerickjorgebNo ratings yet
- Lecture 16 - CE 342 - FE1 - S2019 - Slope StabilityDocument36 pagesLecture 16 - CE 342 - FE1 - S2019 - Slope StabilityBedirhan KizarNo ratings yet
- FLEXIABLEDocument50 pagesFLEXIABLEBIZUNEH NIGUSSIENo ratings yet
- Topic 2-2 Slope - StabilityDocument46 pagesTopic 2-2 Slope - Stability彭宇鑫No ratings yet
- 4ECG553-Chapter4-Slope StabilityDocument72 pages4ECG553-Chapter4-Slope StabilitysyahidahMNo ratings yet
- Strata Control/ Ground Control:: ExplainationDocument12 pagesStrata Control/ Ground Control:: ExplainationzahidNo ratings yet
- Geologi Struktur (Fracture Mechanics)Document57 pagesGeologi Struktur (Fracture Mechanics)Muhammad Fadly OhyverNo ratings yet
- Slope StabilityDocument25 pagesSlope StabilityFerdousul Haque ShikderNo ratings yet
- Theory of Shear StrengthDocument33 pagesTheory of Shear Strengthsumitha selamaniNo ratings yet
- Eexperiment Report - Slope With ReinforcementDocument10 pagesEexperiment Report - Slope With ReinforcementRaja GNo ratings yet
- Report On Rock MechanicsDocument44 pagesReport On Rock MechanicsElyssa Michelle Caringas MicuaNo ratings yet
- Fault and Joint Development in Brittle and Semi-Brittle Rock: The Commonwealth and International Library: Geology DivisionFrom EverandFault and Joint Development in Brittle and Semi-Brittle Rock: The Commonwealth and International Library: Geology DivisionNo ratings yet
- Module 5 - Groundwater Analysis (2D & 3D)Document137 pagesModule 5 - Groundwater Analysis (2D & 3D)Irfandi Oky PermanaNo ratings yet
- Module 6 - Probabilistic and Sensitivity AnalysisDocument107 pagesModule 6 - Probabilistic and Sensitivity AnalysisIrfandi Oky PermanaNo ratings yet
- Module 7 - Shear Strength Reduction (2D & 3D)Document158 pagesModule 7 - Shear Strength Reduction (2D & 3D)Irfandi Oky PermanaNo ratings yet
- Rock Mass ModulusDocument8 pagesRock Mass ModulusIrfandi Oky PermanaNo ratings yet
- MECANISMOS de Metais de TransicaoDocument36 pagesMECANISMOS de Metais de TransicaoJoão BarbosaNo ratings yet
- Linear Dynamic Analysis of Free-Piston Stirling Engines OnDocument21 pagesLinear Dynamic Analysis of Free-Piston Stirling Engines OnCh Sameer AhmedNo ratings yet
- Onset Hobo Trade T Cdi 5200 5400 User ManualDocument3 pagesOnset Hobo Trade T Cdi 5200 5400 User Manualpaull20020% (1)
- Manual: Functional SafetyDocument24 pagesManual: Functional SafetymhaioocNo ratings yet
- Assignment Csi104Document11 pagesAssignment Csi104Minh Lê KhảiNo ratings yet
- WinCC Control CenterDocument300 pagesWinCC Control Centerwww.otomasyonegitimi.comNo ratings yet
- Ymrtc LogDocument26 pagesYmrtc LogVinicius Silveira0% (1)
- Meniere's Disease - Retinal Detatchment - GlaucomaDocument3 pagesMeniere's Disease - Retinal Detatchment - Glaucomaybet03No ratings yet
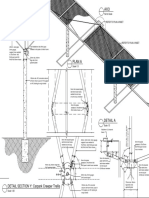
- TrellisDocument1 pageTrellisCayenne LightenNo ratings yet
- 2a Unani Medicine in India - An OverviewDocument123 pages2a Unani Medicine in India - An OverviewGautam NatrajanNo ratings yet
- T-Tess Six Educator StandardsDocument1 pageT-Tess Six Educator Standardsapi-351054075100% (1)
- Chem Resist ChartDocument13 pagesChem Resist ChartRC LandaNo ratings yet
- Ac221 and Ac211 CourseoutlineDocument10 pagesAc221 and Ac211 CourseoutlineLouis Maps MapangaNo ratings yet
- List of The Legend of Korra Episodes - Wikipedia PDFDocument27 pagesList of The Legend of Korra Episodes - Wikipedia PDFEmmanuel NocheNo ratings yet
- PDF of Tally ShortcutsDocument6 pagesPDF of Tally ShortcutsSuraj Mehta100% (2)
- JP Selecta IncubatorDocument5 pagesJP Selecta IncubatorAhmed AlkabodyNo ratings yet
- Buildingawinningsalesforce WP DdiDocument14 pagesBuildingawinningsalesforce WP DdiMawaheb ContractingNo ratings yet
- Financial Accounting 1: Chapter 5 Cash and Short Term InvestmentDocument31 pagesFinancial Accounting 1: Chapter 5 Cash and Short Term InvestmentCabdiraxmaan GeeldoonNo ratings yet
- Internal Analysis: Pertemuan KeDocument15 pagesInternal Analysis: Pertemuan Kekintan utamiNo ratings yet
- III.A.1. University of Hawaii at Manoa Cancer Center Report and Business PlanDocument35 pagesIII.A.1. University of Hawaii at Manoa Cancer Center Report and Business Planurindo mars29No ratings yet
- De DusterDocument6 pagesDe DusterArstNo ratings yet
- Mitsubishi FanDocument2 pagesMitsubishi FanKyaw ZawNo ratings yet
- NGCP EstimatesDocument19 pagesNGCP EstimatesAggasid ArnelNo ratings yet
- Nestlé CASEDocument3 pagesNestlé CASEAli Iqbal CheemaNo ratings yet
- Mode of Action of Vancomycin: L D D D D DDocument8 pagesMode of Action of Vancomycin: L D D D D DNolanNo ratings yet