You might also like
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Bently Nevada 3500 22Document9 pagesBently Nevada 3500 22papashoNo ratings yet
- 1st Rev Road RaggingDocument22 pages1st Rev Road RaggingElamaruthiNo ratings yet
- TRISC 0 // Set Direction To Be Output 0 Output 1 InputDocument7 pagesTRISC 0 // Set Direction To Be Output 0 Output 1 Inputiri_scribdNo ratings yet
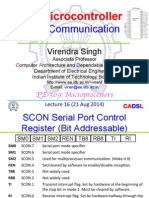
- Serial Communication: 8051 MicrocontrollerDocument15 pagesSerial Communication: 8051 MicrocontrollerRohan JainNo ratings yet
- Low Power UART Design For Serial Data CommunicationDocument21 pagesLow Power UART Design For Serial Data CommunicationSuman Gm100% (1)
- 6976 TDMoIPBackgrounderDocument9 pages6976 TDMoIPBackgrounderfonpereiraNo ratings yet
- Bidirectional Visitor CounterDocument17 pagesBidirectional Visitor CounterPankaj KumarNo ratings yet
- Serial Communication With 8051Document25 pagesSerial Communication With 8051prakriti sankhlaNo ratings yet
- Can Bus Standalone ControllerDocument24 pagesCan Bus Standalone ControllerDoan Van TuanNo ratings yet
- Es Notes Unit 5Document33 pagesEs Notes Unit 51balamanianNo ratings yet
- DirectQAM Specifications v1.0BDocument9 pagesDirectQAM Specifications v1.0BFlorin NituNo ratings yet
- Cip 8Document4 pagesCip 8hthusithNo ratings yet
- Speed Detector For HighwaysDocument29 pagesSpeed Detector For HighwaysShama MahinNo ratings yet
- Fundamentals of Microcontroller & Its Application: Unit-IvDocument17 pagesFundamentals of Microcontroller & Its Application: Unit-IvRajan PatelNo ratings yet
- 6v102 PDFDocument16 pages6v102 PDFtetrapoltestNo ratings yet
- Modbus RTU VLT Micro DriveDocument17 pagesModbus RTU VLT Micro DriveIvan Cordero ValerianoNo ratings yet
- 8051 CH10 950217Document110 pages8051 CH10 950217shivaspyNo ratings yet
- 4 TMO18042 UTRAN ScenarioDocument59 pages4 TMO18042 UTRAN ScenarioKhaled GamalNo ratings yet
- Serial Vs ParallelDocument8 pagesSerial Vs Paralleltushar_purushothamNo ratings yet
- Auto LightDocument37 pagesAuto LightKrishna MalhotraNo ratings yet
- Mobile Digital Datalink For Field Work ApplicationsDocument4 pagesMobile Digital Datalink For Field Work ApplicationsMatthew CarterNo ratings yet
- Use Jitter Buffer To Compensate For PDVDocument5 pagesUse Jitter Buffer To Compensate For PDVIrfan Ul HaqNo ratings yet
- Modul-1 Overview & Network Elemen GPONDocument107 pagesModul-1 Overview & Network Elemen GPONoosmanxzfNo ratings yet
- UARTDocument27 pagesUARTNaveen Kumar100% (1)
- Unit III MPMC MaterialDocument33 pagesUnit III MPMC Materialsree2728No ratings yet
- PCF8582C-2: 1. DescriptionDocument21 pagesPCF8582C-2: 1. DescriptionroozbehxoxNo ratings yet
- Using UART of PIC Microcontroller With Hi-Tech CDocument13 pagesUsing UART of PIC Microcontroller With Hi-Tech CYoussef KhairaneNo ratings yet
- 80C51 8-Bit Microcontroller Family: 4K/128 Otp/Rom/Romless, 8 Channel 8 Bit A/D, Watchdog TimerDocument28 pages80C51 8-Bit Microcontroller Family: 4K/128 Otp/Rom/Romless, 8 Channel 8 Bit A/D, Watchdog Timerchecker0815No ratings yet
- 21801FDocument88 pages21801FJorge GarabanNo ratings yet
- Surya - First PhasereportDocument10 pagesSurya - First PhasereportSuribabuIppiliNo ratings yet
- Doc3ab877f2ec329 2nd Serial PDFDocument8 pagesDoc3ab877f2ec329 2nd Serial PDFscribduser100% (1)
- IP SignallingDocument27 pagesIP SignallingvashishthanuragNo ratings yet
- Microcontroller Based LPG Gas Detector Using GSM ModuleDocument22 pagesMicrocontroller Based LPG Gas Detector Using GSM ModuleKrishna MalhotraNo ratings yet
- Infrared Data Transmission With The PIC Microcontroller: Matthew Beckler Beck0778@umn - Edu EE2361 Lab 007 May 5, 2006Document8 pagesInfrared Data Transmission With The PIC Microcontroller: Matthew Beckler Beck0778@umn - Edu EE2361 Lab 007 May 5, 2006anujchopra007No ratings yet
- UG - EC303 DSP Part-6 On-Chip Peripherals-Print PDFDocument20 pagesUG - EC303 DSP Part-6 On-Chip Peripherals-Print PDFapuurvaNo ratings yet
- Rc1201-2Ge16E1T1 Tdmoverip Gateway: Raisecom Technology Co., LTDDocument5 pagesRc1201-2Ge16E1T1 Tdmoverip Gateway: Raisecom Technology Co., LTDĐỗ TháiNo ratings yet
- RTP AkanshaDocument25 pagesRTP AkanshadeogarhNo ratings yet
- 8051 CH10Document93 pages8051 CH10Murali KrishnaNo ratings yet
- TC General and TCIFDocument27 pagesTC General and TCIFDeepayan ChoudhuryNo ratings yet
- MC Unit 4Document42 pagesMC Unit 4Kalai VaniNo ratings yet
- Stand-Alone CAN Controller With SPI Interface: Features DescriptionDocument84 pagesStand-Alone CAN Controller With SPI Interface: Features DescriptionjismagicNo ratings yet
- Coin Based Mobile Charger Project ReportDocument49 pagesCoin Based Mobile Charger Project ReportAnonymous dyJj42aWMb92% (13)
- Lab Serial Communication 8051Document3 pagesLab Serial Communication 8051khawar iqbalNo ratings yet
- EwsdDocument13 pagesEwsdEngr Gohar MumtazNo ratings yet
- 6 +8284+Clock+GeneratorDocument4 pages6 +8284+Clock+GeneratorJayashreedas1990No ratings yet
- Mce BLK Dia - Signal Flow - 1Document1 pageMce BLK Dia - Signal Flow - 1Cardell93No ratings yet
- CN Unit V 2 3.udp TCPDocument46 pagesCN Unit V 2 3.udp TCPT20UBCA027 - Mithuna ShanmugamNo ratings yet
- ALDEC 16450 IP Core Data Sheet: Table 1: Core Signal PinoutDocument4 pagesALDEC 16450 IP Core Data Sheet: Table 1: Core Signal PinoutDeepa DevarajNo ratings yet
- Design and Simulation of Uart Protocol Based On Verilog: B.Jeevan & M.NeerajaDocument4 pagesDesign and Simulation of Uart Protocol Based On Verilog: B.Jeevan & M.NeerajaTushar JainNo ratings yet
- A4.8051 Communication Protocols - UART, RS232Document5 pagesA4.8051 Communication Protocols - UART, RS232sneha singhNo ratings yet
- 09 - I2C Serial CommunicationsmDocument10 pages09 - I2C Serial CommunicationsmSorabh DungNo ratings yet
- RTP: Real-Time Transport ProtocolDocument34 pagesRTP: Real-Time Transport ProtocolKhaled RelaTivNo ratings yet
- RC5 Protocol Decoding With 8051 Microcontroller (Embedded C) - ProEmbSys TechnologiesDocument4 pagesRC5 Protocol Decoding With 8051 Microcontroller (Embedded C) - ProEmbSys TechnologieskhhoaNo ratings yet
- UART in LPC2148 ARM7 MicrocontrollerDocument8 pagesUART in LPC2148 ARM7 Microcontrollerrudra_1No ratings yet
- Universal Asynchronous Receiver Transmitter (UART)Document38 pagesUniversal Asynchronous Receiver Transmitter (UART)Chandresh Trivedi100% (1)
- Chapter 8 No.7 Signaling System ............................................................................................... 8-1Document8 pagesChapter 8 No.7 Signaling System ............................................................................................... 8-1SamuelNo ratings yet
- E XMCR6A 060 COGE5 Features (20) R01 150928aDocument20 pagesE XMCR6A 060 COGE5 Features (20) R01 150928aKelvin LeongNo ratings yet
- CAM625 2019 s1 Module1Document31 pagesCAM625 2019 s1 Module1Kelvin LeongNo ratings yet
- Blank Katakana ChartDocument1 pageBlank Katakana ChartKelvin LeongNo ratings yet
- FLIR Saros DH 390 BrochureDocument8 pagesFLIR Saros DH 390 BrochureKelvin LeongNo ratings yet
- Shortfall FormDocument1 pageShortfall FormKelvin LeongNo ratings yet
- Part L, Conservation of Fuel and Energy 2008Document67 pagesPart L, Conservation of Fuel and Energy 2008Kelvin LeongNo ratings yet
- GetzDocument20 pagesGetzKelvin Leong100% (2)
- London Tourist MapDocument1 pageLondon Tourist MapAmber RileyNo ratings yet
- LG - Warranty CardDocument2 pagesLG - Warranty CardKelvin Leong0% (2)
- LG - User ManualDocument1 pageLG - User ManualKelvin LeongNo ratings yet
- Give To Live 2009Document229 pagesGive To Live 2009Kelvin LeongNo ratings yet
- D100 User Guide - (V100R001 - 01, En, Normal) PDFDocument34 pagesD100 User Guide - (V100R001 - 01, En, Normal) PDFKelvin LeongNo ratings yet
- Neuschwanstein e A4Document9 pagesNeuschwanstein e A4mariosergio05No ratings yet
- Engineers Guide To Drinks - ColorDocument1 pageEngineers Guide To Drinks - ColorStuie444No ratings yet
- Mbo 004131589 SD 2Document2 pagesMbo 004131589 SD 2Kelvin LeongNo ratings yet
- Hai Winnablebattles ProgressreportDocument3 pagesHai Winnablebattles ProgressreportKelvin LeongNo ratings yet
- Vancomycin-Resistant Enterococci (VRE) Outbreak: Lessons Learned On The Importance of Near-Patient CleaningDocument1 pageVancomycin-Resistant Enterococci (VRE) Outbreak: Lessons Learned On The Importance of Near-Patient CleaningKelvin LeongNo ratings yet
- DKW 312 SuppDocument32 pagesDKW 312 SuppKelvin LeongNo ratings yet
- Dataset S1. Enterococcus Faecium MetadataDocument6 pagesDataset S1. Enterococcus Faecium MetadataKelvin LeongNo ratings yet
- EndNote Paper1Document2 pagesEndNote Paper1Kelvin LeongNo ratings yet
- Workflow For DNA Purification From Tough SpecimensDocument1 pageWorkflow For DNA Purification From Tough SpecimensKelvin LeongNo ratings yet
- Js 190 - Dna Extraction MethodsDocument56 pagesJs 190 - Dna Extraction MethodsKelvin LeongNo ratings yet
- WimaxDocument13 pagesWimaxKelvin LeongNo ratings yet
- London Tourist MapDocument1 pageLondon Tourist MapAmber RileyNo ratings yet
- Chapter 8Document31 pagesChapter 8RobbieNo ratings yet
- Cisco Change Management Best PracticesDocument14 pagesCisco Change Management Best PracticessmuliawNo ratings yet
- Aztech wl830rt4Document4 pagesAztech wl830rt4CikHusingNo ratings yet
- Bus StandardsDocument2 pagesBus Standardsweilong100% (1)
- Cisco Catalyst 2950 Series SwitchesDocument12 pagesCisco Catalyst 2950 Series SwitchesEDUARDONo ratings yet
- Lab 6 SolutionsDocument4 pagesLab 6 Solutionsapi-251706325100% (1)
- Universal Verification Methodology Based Verification Environment For PCIE Data Link LayerDocument5 pagesUniversal Verification Methodology Based Verification Environment For PCIE Data Link LayerAnonymous kw8Yrp0R5rNo ratings yet
- Performance of WifiDocument78 pagesPerformance of WifiAr ArosNo ratings yet
- CCNA Questions July 2019Document294 pagesCCNA Questions July 2019Emmanuel Teixeira de SousaNo ratings yet
- TFTPDocument6 pagesTFTPChallapalli RajyalaxmiNo ratings yet
- Barracuda Load BalancerDocument2 pagesBarracuda Load BalancerahmadmanzoorahmadNo ratings yet
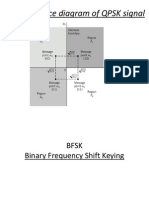
- BFSK, DPSK, Ask, Error ControlDocument64 pagesBFSK, DPSK, Ask, Error ControlLuke HicksNo ratings yet
- FFRTC LogDocument3 pagesFFRTC LogEnes FıratNo ratings yet
- A6V10248285 - Fire Control Panel - enDocument22 pagesA6V10248285 - Fire Control Panel - enStefanPamintNo ratings yet
- Lecture 3 P4 NetFPGADocument83 pagesLecture 3 P4 NetFPGAnguyentienduy1512No ratings yet
- User Guide: Boson Netsim OverviewDocument54 pagesUser Guide: Boson Netsim Overviewkssr_579410930No ratings yet
- DD-WRT Setup v1Document8 pagesDD-WRT Setup v1e23696970% (1)
- A10 Web LoggingDocument11 pagesA10 Web LoggingTuấn Anh NguyễnNo ratings yet
- What Is A VPN?: VPN or Virtual Private NetworkDocument2 pagesWhat Is A VPN?: VPN or Virtual Private NetworkVish RawatNo ratings yet
- SGOS RelNotesDocument112 pagesSGOS RelNotesjeysson86No ratings yet
- DVEO Atlas Media Servers - JUNE Overview - 2Document14 pagesDVEO Atlas Media Servers - JUNE Overview - 2laszlo-368875No ratings yet
- Huawei Ne40Document2 pagesHuawei Ne40Jader Vieira da RosaNo ratings yet
- Ag2017-21 20170801Document34 pagesAg2017-21 20170801brunoscarpaNo ratings yet
- Gxw4004 User ManualDocument60 pagesGxw4004 User ManualRick RutledgeNo ratings yet
- Catalyst 2960-X and 2960-XR Switch Hardware GuideDocument20 pagesCatalyst 2960-X and 2960-XR Switch Hardware GuideLuka KuceljNo ratings yet
- TP-1 VPN Configuration Lab Using Routers in Cisco Packet TracerDocument5 pagesTP-1 VPN Configuration Lab Using Routers in Cisco Packet TracerKhaoula RAZZAKINo ratings yet
- Computer Networking MCQ Set - 5 (/computer-Networking-Mcq-For-Objective-Exam/computer-Networking-Mcq-Set - 5.html)Document3 pagesComputer Networking MCQ Set - 5 (/computer-Networking-Mcq-For-Objective-Exam/computer-Networking-Mcq-Set - 5.html)Rahul LakhmaraNo ratings yet
- Channel Coding NotesDocument15 pagesChannel Coding NotesPramath Keny100% (1)
- SNMP Commissioning InstructionsDocument7 pagesSNMP Commissioning Instructionsdjunaedi djNo ratings yet
- U - ZXSDR (V4.14) Quick Data Configuration GuideDocument68 pagesU - ZXSDR (V4.14) Quick Data Configuration GuidemahdimecarniNo ratings yet