You might also like
- Psych PresurgicalDocument31 pagesPsych Presurgicalriham ammar100% (1)
- Electrical Plan - ResidentialDocument1 pageElectrical Plan - ResidentialJunnel NegadNo ratings yet
- Lagrange Equation 1Document32 pagesLagrange Equation 1Gthulasi78No ratings yet
- Mathematical ModelingDocument8 pagesMathematical ModelingMourougapragash SubramanianNo ratings yet
- Another Look at Pistis ChristouDocument17 pagesAnother Look at Pistis Christouakimel100% (1)
- Facility Layout Case StudyDocument8 pagesFacility Layout Case StudyHitesh SinglaNo ratings yet
- Lecture 4Document7 pagesLecture 4Omed Juma'aNo ratings yet
- Hybrid Systems - TutorialDocument66 pagesHybrid Systems - TutorialKarthik VazhuthiNo ratings yet
- Modelling of Electrical SystemsDocument3 pagesModelling of Electrical SystemsPandu KNo ratings yet
- Math 2Document11 pagesMath 2Anonymous UrzdtCB0INo ratings yet
- Hybrid Dynamic Systems Tutorial PDFDocument66 pagesHybrid Dynamic Systems Tutorial PDFkkkprot100% (1)
- School of Electrical and Computer EngineeringDocument19 pagesSchool of Electrical and Computer EngineeringSurafel TadesseNo ratings yet
- Modul 3 Mathematical Modeling of Dynamic SystemsDocument12 pagesModul 3 Mathematical Modeling of Dynamic SystemsGiraldo SihombingNo ratings yet
- Chapter ThreeDocument13 pagesChapter ThreeGetahun tuluNo ratings yet
- Mathematical ModelingDocument7 pagesMathematical ModelingTahmid ShihabNo ratings yet
- Samantaray 2001 WWW - Bondgraphs.com AboutDocument25 pagesSamantaray 2001 WWW - Bondgraphs.com AboutAnwarul IslaamNo ratings yet
- Out2t1 PDFDocument27 pagesOut2t1 PDFAjay Nath S ANo ratings yet
- Chapter TwoDocument32 pagesChapter TwowabdushukurNo ratings yet
- Applied Sciences: Comparative Analysis of Current Control Techniques To Support Virtual Inertia ApplicationsDocument19 pagesApplied Sciences: Comparative Analysis of Current Control Techniques To Support Virtual Inertia Applicationswwahib2No ratings yet
- D'Alembert-Lagrange!s Principal Equations, Their Origin and ApplicationsDocument45 pagesD'Alembert-Lagrange!s Principal Equations, Their Origin and ApplicationsBagulSurabhiNo ratings yet
- Week 1B - Online Classes - S2020Document25 pagesWeek 1B - Online Classes - S2020Muhammad Tayyab YousafzaiNo ratings yet
- Mechanical SystemsDocument43 pagesMechanical SystemsRajendar PonagantiNo ratings yet
- Unidad 2 Sistema Sec Uac I OnesDocument15 pagesUnidad 2 Sistema Sec Uac I OnesRAUL OSORIO RAMOSNo ratings yet
- W3a PDFDocument26 pagesW3a PDFShujah RashidNo ratings yet
- Circuit Analysis in Time DomainDocument6 pagesCircuit Analysis in Time DomainShiva SanthoshNo ratings yet
- Bio SystemDocument8 pagesBio SystemAndrez Fernando Martinez MendietaNo ratings yet
- Modeling of Electromechanical Systems PDFDocument44 pagesModeling of Electromechanical Systems PDFBrandon GordonNo ratings yet
- Mathematical Models of SystemsDocument45 pagesMathematical Models of SystemsSaid Ahmed AliNo ratings yet
- Topic 2. Matemethical Modelling of Control Systems V1Document13 pagesTopic 2. Matemethical Modelling of Control Systems V1xREDCivicCometxNo ratings yet
- Transient Analysis of Linear Circuits Using Constraint Logic ProgrammingDocument27 pagesTransient Analysis of Linear Circuits Using Constraint Logic Programmingsinghhv21No ratings yet
- Mathematical Models: Module - 2Document13 pagesMathematical Models: Module - 2Rajath UpadhyaNo ratings yet
- Linearization SsDocument29 pagesLinearization SsMY PRACTICENo ratings yet
- Garuda 1306425Document11 pagesGaruda 1306425raghavendran_beeeeNo ratings yet
- Losses Epsr 1998Document6 pagesLosses Epsr 1998Gabriel AlvarengaNo ratings yet
- Lumped Element ModelDocument6 pagesLumped Element ModelLuis PressoNo ratings yet
- Simulation and Control Design of An Uniaxial Magnetic Levitation SystemDocument6 pagesSimulation and Control Design of An Uniaxial Magnetic Levitation SystemElmer Mamani PretelNo ratings yet
- Mathematical Modeling of Biosensors: Enzyme-Substrate Interaction and Biomolecular InteractionDocument15 pagesMathematical Modeling of Biosensors: Enzyme-Substrate Interaction and Biomolecular InteractionElbahi DjaalabNo ratings yet
- Class 2 - Mathematical Modeling Using Transfer Function ApproachDocument14 pagesClass 2 - Mathematical Modeling Using Transfer Function Approachapi-26676616No ratings yet
- Modeling of Electromechanical SystemsDocument30 pagesModeling of Electromechanical Systemssm-malik100% (1)
- Unit 2: Transfer Function: PrefaceDocument9 pagesUnit 2: Transfer Function: PrefaceNeans PlanterasNo ratings yet
- Module 2 Controls PDFDocument24 pagesModule 2 Controls PDFPrincess LutivaNo ratings yet
- Chap 2 1 Modeling in Freq 1Document48 pagesChap 2 1 Modeling in Freq 1Furkan DedeNo ratings yet
- 12 Dyna PDFDocument10 pages12 Dyna PDFSameh LotfyNo ratings yet
- 12 Dyna PDFDocument10 pages12 Dyna PDFSameh LotfyNo ratings yet
- Dynamic Analysis: Force Equilibrium Is Fundamental in The Dynamic Analysis of StructuresDocument10 pagesDynamic Analysis: Force Equilibrium Is Fundamental in The Dynamic Analysis of StructuresjkcoNo ratings yet
- 12 Dyna PDFDocument10 pages12 Dyna PDFPramodNo ratings yet
- Analysis of Oscillations With Eigenanalysis andDocument8 pagesAnalysis of Oscillations With Eigenanalysis andMadhusudhan SrinivasanNo ratings yet
- IC6501 Iq PDFDocument13 pagesIC6501 Iq PDFKRISHNA VAMSINo ratings yet
- Lecture 2Document107 pagesLecture 2Nowrin JawedNo ratings yet
- Network 111Document211 pagesNetwork 111ERMIAS AmanuelNo ratings yet
- New Technique For Computation of Closest Hopf Bifurcation Point Using Real-Coded Genetic AlgorithmDocument8 pagesNew Technique For Computation of Closest Hopf Bifurcation Point Using Real-Coded Genetic AlgorithmJosaphat GouveiaNo ratings yet
- Cstam Redysim13surilDocument6 pagesCstam Redysim13surilJorge Renato Chirinos QuiñonezNo ratings yet
- Instrumentation and Control. Engineering ModelsDocument28 pagesInstrumentation and Control. Engineering Modelsadem ametiNo ratings yet
- Mechatronics Modeling With Bond Graphs by Kevin Craig PDFDocument125 pagesMechatronics Modeling With Bond Graphs by Kevin Craig PDFAhmed H El ShaerNo ratings yet
- Exp01 EEE318Document7 pagesExp01 EEE318Abid AbdullahNo ratings yet
- (Control Engineering) : State Variables and State-Space Representation"Document13 pages(Control Engineering) : State Variables and State-Space Representation"Nasir AliNo ratings yet
- Differential Ev0lutionDocument10 pagesDifferential Ev0lutionJosh BabuNo ratings yet
- CSTR LMPC Vs NMPCDocument6 pagesCSTR LMPC Vs NMPCgverma9461No ratings yet
- Modeling 101Document15 pagesModeling 101สหายดิว ลูกพระอาทิตย์No ratings yet
- CH-4 System Analysis & OptimizationDocument37 pagesCH-4 System Analysis & OptimizationManamno BezaNo ratings yet
- Vibration: Fundamentals and PracticeDocument19 pagesVibration: Fundamentals and PracticeMuket AgmasNo ratings yet
- LN2 (Electrical Systems)Document38 pagesLN2 (Electrical Systems)Deniz DemirNo ratings yet
- Power Geometry in Algebraic and Differential EquationsFrom EverandPower Geometry in Algebraic and Differential EquationsNo ratings yet
- Modern Anti-windup Synthesis: Control Augmentation for Actuator SaturationFrom EverandModern Anti-windup Synthesis: Control Augmentation for Actuator SaturationRating: 5 out of 5 stars5/5 (1)
- Time Response and StabilityDocument13 pagesTime Response and StabilityJunnel NegadNo ratings yet
- Problem Set No. 1Document2 pagesProblem Set No. 1Junnel NegadNo ratings yet
- Work Overview of A Facility Maintenance EngineerDocument16 pagesWork Overview of A Facility Maintenance EngineerJunnel NegadNo ratings yet
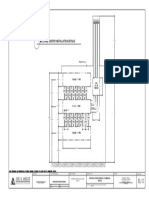
- Metering Center Installation Details: Jose R. AngelesDocument1 pageMetering Center Installation Details: Jose R. AngelesJunnel NegadNo ratings yet
- Single - Line Diagram: Jose R. AngelesDocument1 pageSingle - Line Diagram: Jose R. AngelesJunnel NegadNo ratings yet
- Single - Line Diagram: Jose R. AngelesDocument1 pageSingle - Line Diagram: Jose R. AngelesJunnel NegadNo ratings yet
- Problems On Polyphase SystemsDocument1 pageProblems On Polyphase SystemsJunnel NegadNo ratings yet
- Control Systems (Introduction)Document15 pagesControl Systems (Introduction)Junnel NegadNo ratings yet
- Control System Analysis and DesignDocument2 pagesControl System Analysis and DesignJunnel NegadNo ratings yet
- Sag Tension CaalculationDocument6 pagesSag Tension CaalculationDipak BandyopadhyayNo ratings yet
- Control Systems (Introduction)Document15 pagesControl Systems (Introduction)Junnel NegadNo ratings yet
- Sag Tension CaalculationDocument6 pagesSag Tension CaalculationDipak BandyopadhyayNo ratings yet
- Quiz On Transfer FunctionsDocument2 pagesQuiz On Transfer FunctionsJunnel NegadNo ratings yet
- Control System DesignDocument11 pagesControl System DesignJunnel NegadNo ratings yet
- Time ResponseDocument21 pagesTime ResponseJunnel NegadNo ratings yet
- Time Response AnalysisDocument21 pagesTime Response AnalysisJunnel NegadNo ratings yet
- List of ErpDocument2 pagesList of Erpnavyug vidyapeeth trust mahadNo ratings yet
- Boonton Radio Corporation - The Notebook 12Document8 pagesBoonton Radio Corporation - The Notebook 12Luiz Roberto PascotteNo ratings yet
- Australia Harvesting Rainwater For Environment, Conservation & Education: Some Australian Case Studies - University of TechnologyDocument8 pagesAustralia Harvesting Rainwater For Environment, Conservation & Education: Some Australian Case Studies - University of TechnologyFree Rain Garden ManualsNo ratings yet
- Future Scope and ConclusionDocument13 pagesFuture Scope and ConclusionGourab PalNo ratings yet
- Dania - 22 - 12363 - 1-Lecture 2 Coordinate System-Fall 2015Document34 pagesDania - 22 - 12363 - 1-Lecture 2 Coordinate System-Fall 2015erwin100% (1)
- Course: Consumer Behaviour: Relaunching of Mecca Cola in PakistanDocument10 pagesCourse: Consumer Behaviour: Relaunching of Mecca Cola in PakistanAnasAhmedNo ratings yet
- Under The SHODH Program For ResearchDocument3 pagesUnder The SHODH Program For ResearchSurya ShuklaNo ratings yet
- Folktales Stories For Kids: Two Brothers StoryDocument1 pageFolktales Stories For Kids: Two Brothers StoryljNo ratings yet
- Bleeding Disorders in Pregnancy: Table 1Document7 pagesBleeding Disorders in Pregnancy: Table 1KharismaNisaNo ratings yet
- North-South Railway Project - South LineDocument49 pagesNorth-South Railway Project - South LinesuperNo ratings yet
- Power Factor Improvement SystemDocument25 pagesPower Factor Improvement SystemBijoy SahaNo ratings yet
- Hal Foster Vision and Visuality Discussions in Contemporary Culture PDFDocument75 pagesHal Foster Vision and Visuality Discussions in Contemporary Culture PDFEd GomesNo ratings yet
- FYP List 2020 21RDocument3 pagesFYP List 2020 21RSaif UllahNo ratings yet
- Competency #14 Ay 2022-2023 Social StudiesDocument22 pagesCompetency #14 Ay 2022-2023 Social StudiesCharis RebanalNo ratings yet
- Student Exploration: Magnetism (Find Gizmo Icon On Eclass)Document4 pagesStudent Exploration: Magnetism (Find Gizmo Icon On Eclass)Abdel Majeed Tuffaha0% (1)
- Sap Business Objects Edge Series 3.1 Install Windows enDocument104 pagesSap Business Objects Edge Series 3.1 Install Windows enGerardoNo ratings yet
- Reading The Bible From Feminist, Dalit, Tribal and Adivasi Perspectives (Course Code: BC 107)Document8 pagesReading The Bible From Feminist, Dalit, Tribal and Adivasi Perspectives (Course Code: BC 107)Arun Stanley100% (2)
- Case 07-53: #REF! #REF! #REF! #REF! #REF!Document6 pagesCase 07-53: #REF! #REF! #REF! #REF! #REF!saad bin sadaqatNo ratings yet
- Exercise Chapter 4 This Is How You Do ItDocument10 pagesExercise Chapter 4 This Is How You Do ItAgustina WidiyantiNo ratings yet
- Hunk (Aakc) - (Nov 2015)Document68 pagesHunk (Aakc) - (Nov 2015)Russell RiderNo ratings yet
- Culture NegotiationsDocument17 pagesCulture NegotiationsShikha SharmaNo ratings yet
- Listening 3b Skills Test 1aDocument3 pagesListening 3b Skills Test 1aPticaSelicaNo ratings yet
- CE 2812-Permeability Test PDFDocument3 pagesCE 2812-Permeability Test PDFShiham BadhurNo ratings yet
- Arch Plan-Agner Boco (For Blue Print) - p1Document1 pageArch Plan-Agner Boco (For Blue Print) - p1Jay CeeNo ratings yet
- Agriculture: PAPER 3 Practical TestDocument8 pagesAgriculture: PAPER 3 Practical Testmstudy123456No ratings yet
- A Person On A Position of Air Traffic ControllerDocument7 pagesA Person On A Position of Air Traffic ControllerMUHAMMAD RAMZANNo ratings yet
- Gunnar Fischer's Work On Ingmar Bergman's The Seventh Seal and Wild StrawberriesDocument6 pagesGunnar Fischer's Work On Ingmar Bergman's The Seventh Seal and Wild StrawberriesSaso Dimoski100% (1)