You might also like
- Business Analytics: A Data-Driven Decision Making Approach For Business, Volume IDocument48 pagesBusiness Analytics: A Data-Driven Decision Making Approach For Business, Volume ICharlene KronstedtNo ratings yet
- Single-Channel and Multi-Channel Image Reconstruction in X-Ray CTDocument6 pagesSingle-Channel and Multi-Channel Image Reconstruction in X-Ray CTlambanaveenNo ratings yet
- 1 s2.0 S221137972300058X MainDocument9 pages1 s2.0 S221137972300058X MainJuhi GargNo ratings yet
- Compressive Sensing in Electromagnetics A Review PDFDocument15 pagesCompressive Sensing in Electromagnetics A Review PDFwuchennuaaNo ratings yet
- Tao Wan Nishan Canagarajah Alin Achim: Compressive Image FusionDocument4 pagesTao Wan Nishan Canagarajah Alin Achim: Compressive Image FusionManwinder SinghNo ratings yet
- Optimal MTM Spectral Estimation Based Detection For Cognitive Radio in HDTVDocument5 pagesOptimal MTM Spectral Estimation Based Detection For Cognitive Radio in HDTVAbdul RahimNo ratings yet
- Novel Approaches For Performance Enhancement of High Rate-Spatial Modulation SystemDocument5 pagesNovel Approaches For Performance Enhancement of High Rate-Spatial Modulation SystemifireNo ratings yet
- Data-Driven-Based Beam Selection For Hybrid Beamforming in Ultra-Dense NetworksDocument10 pagesData-Driven-Based Beam Selection For Hybrid Beamforming in Ultra-Dense NetworksSofia BouchenakNo ratings yet
- Use of Space Shift Keying (SSK) Modulation in Two-Way Amplify-and-Forward RelayingDocument7 pagesUse of Space Shift Keying (SSK) Modulation in Two-Way Amplify-and-Forward RelayingmaheshwaranNo ratings yet
- PhysRevLett 131 053803Document6 pagesPhysRevLett 131 053803Marco SIMONENo ratings yet
- 谱域光学相干层析系统的Document9 pages谱域光学相干层析系统的florazephNo ratings yet
- A Theoretical Model For Resonant Frequency and Radiation Pattern On Rectangular Microstrip Patch Antenna On Liquid Crystal SubstrateDocument8 pagesA Theoretical Model For Resonant Frequency and Radiation Pattern On Rectangular Microstrip Patch Antenna On Liquid Crystal SubstrateLuluk MuthoharohNo ratings yet
- Cyclostationary-Based Architectures ForDocument5 pagesCyclostationary-Based Architectures ForRaman KanaaNo ratings yet
- New Method For Dielectric Properties Characterization of Powder Materials: Application To Silicon CarbideDocument4 pagesNew Method For Dielectric Properties Characterization of Powder Materials: Application To Silicon Carbiderahil7860No ratings yet
- Mtm-Based Spectrum Sensing in Cognitive Wireless Multimedia Sensor Networks (C-WMSNS)Document5 pagesMtm-Based Spectrum Sensing in Cognitive Wireless Multimedia Sensor Networks (C-WMSNS)Abdul RahimNo ratings yet
- A Multi-Feature Visibility Processing Algorithm For Radio Interferometric Imaging On Next-Generation TelescopesDocument14 pagesA Multi-Feature Visibility Processing Algorithm For Radio Interferometric Imaging On Next-Generation TelescopesAnonymous FGY7goNo ratings yet
- 3D Multi-Beam and Null Synthesis by Phase-Only Control For 5G Antenna ArraysDocument13 pages3D Multi-Beam and Null Synthesis by Phase-Only Control For 5G Antenna Arraysdtvt2006No ratings yet
- Reconstruction Using Compressive Sensing A RevieDocument3 pagesReconstruction Using Compressive Sensing A Revietayybahaseeb18No ratings yet
- Simulation and Study For Coherent Ofdm SystemDocument5 pagesSimulation and Study For Coherent Ofdm SystemTaha Al-abedNo ratings yet
- Electronics: Antenna Arrays For Line-of-Sight Massive MIMO: Half Wavelength Is Not EnoughDocument19 pagesElectronics: Antenna Arrays For Line-of-Sight Massive MIMO: Half Wavelength Is Not EnoughRadiah HamdahNo ratings yet
- 2D Photonic CrystalDocument10 pages2D Photonic CrystalXu LêNo ratings yet
- Ee 12Document16 pagesEe 12Dehri BrahimNo ratings yet
- Spectrum Sensing Using Collaborative Beamforming For Ad Hoc Cognitive Radio NetworksDocument4 pagesSpectrum Sensing Using Collaborative Beamforming For Ad Hoc Cognitive Radio Networkssathish14singhNo ratings yet
- Chen 2016Document38 pagesChen 2016surya kavithaNo ratings yet
- Progress in Electromagnetics Research, Vol. 140, 63-89, 2013Document27 pagesProgress in Electromagnetics Research, Vol. 140, 63-89, 2013Sandip MaityNo ratings yet
- The Effect of Macrodiversity On The Performance of Maximal Ratio Combining in Flat Rayleigh FadingDocument10 pagesThe Effect of Macrodiversity On The Performance of Maximal Ratio Combining in Flat Rayleigh FadingTèoNo ratings yet
- Direction FindingDocument5 pagesDirection FindingOlariNo ratings yet
- LMS Algorithm For Optimizing The Phased Array Antenna Radiation PatternDocument5 pagesLMS Algorithm For Optimizing The Phased Array Antenna Radiation PatternJournal of TelecommunicationsNo ratings yet
- 2020 - MDPI - Assessment of Compressive Sensing 2 × 2 MIMO Antenna Design For Millimeter-Wave Radar Image EnhancementDocument11 pages2020 - MDPI - Assessment of Compressive Sensing 2 × 2 MIMO Antenna Design For Millimeter-Wave Radar Image EnhancementMarco PassafiumeNo ratings yet
- Higher Order Finite-Difference Frequency-Domain Analysis of Two-Dimensional Photonic Crystals With Arbitrary ShapesDocument4 pagesHigher Order Finite-Difference Frequency-Domain Analysis of Two-Dimensional Photonic Crystals With Arbitrary ShapesShilongSunNo ratings yet
- Advanced Compressed Sensing Approach To Synthesis of Sparse Antenna ArraysDocument7 pagesAdvanced Compressed Sensing Approach To Synthesis of Sparse Antenna ArraysBhargav BikkaniNo ratings yet
- Wang Paper 1995Document16 pagesWang Paper 1995Amit Narayan RaiNo ratings yet
- A Coding Diffuse Metasurface For RCS ReductionDocument4 pagesA Coding Diffuse Metasurface For RCS ReductionUsman QureshiNo ratings yet
- Determination of Electromagnetic Parameters of A New Metasurface Comprising of Square LoopDocument10 pagesDetermination of Electromagnetic Parameters of A New Metasurface Comprising of Square LoopsouhailNo ratings yet
- Ray Transfer Matrix AnalysisDocument10 pagesRay Transfer Matrix Analysisabcdefghijklmnopqrstuvwxyz12345678910No ratings yet
- Prediction of Dispersion Relation and Pbgs in 2-D Pcs by Using Artificial Neural NetworksDocument3 pagesPrediction of Dispersion Relation and Pbgs in 2-D Pcs by Using Artificial Neural NetworksISI IndiaNo ratings yet
- Hesham Methane Concentrations SensorDocument6 pagesHesham Methane Concentrations SensorHusseinNo ratings yet
- 33-Article Text-157-1-10-20220605Document20 pages33-Article Text-157-1-10-20220605S A KaleNo ratings yet
- Weighted Partitioning For Fast MultiplierlessDocument5 pagesWeighted Partitioning For Fast MultiplierlessDr. Ruqaiya KhanamNo ratings yet
- An Inter-Comparison of Three Spectral-DeconvolutioDocument9 pagesAn Inter-Comparison of Three Spectral-DeconvolutiojaloaliniskiNo ratings yet
- A Class of Spectrum-Sensing Schemes For Cognitive Radio Under Impulsive Noise Circumstances: Structure and Performance in Nonfading and Fading EnvironmentsDocument18 pagesA Class of Spectrum-Sensing Schemes For Cognitive Radio Under Impulsive Noise Circumstances: Structure and Performance in Nonfading and Fading EnvironmentsBedadipta BainNo ratings yet
- Design and Optical Properties of Two-Dimensional Photonic Crystals: A Finite-Difference Time-Domain Numerical Simulation StudyDocument6 pagesDesign and Optical Properties of Two-Dimensional Photonic Crystals: A Finite-Difference Time-Domain Numerical Simulation StudyEkin KaracaNo ratings yet
- Josk 15 2 118Document6 pagesJosk 15 2 118behnazNo ratings yet
- Ráfagas Con CavidadesDocument6 pagesRáfagas Con Cavidadesmpreciado78No ratings yet
- Optimising PICCANTE - An Open Source Particle-in-Cell Code For Advanced Simulations On Tier-0 SystemsDocument8 pagesOptimising PICCANTE - An Open Source Particle-in-Cell Code For Advanced Simulations On Tier-0 SystemsakamNo ratings yet
- Time DomaDocument2 pagesTime DomaJoshua DusariNo ratings yet
- Optics Communications: Xia Qing, Mojtaba Hosseinzadeh SaniDocument6 pagesOptics Communications: Xia Qing, Mojtaba Hosseinzadeh Sanigilang wanulNo ratings yet
- Uwb Isbc2010 Full PaperDocument5 pagesUwb Isbc2010 Full PaperUche ChudeNo ratings yet
- 10 3390@electronics8010068 PDFDocument14 pages10 3390@electronics8010068 PDFkhyatichavdaNo ratings yet
- Correlated Optical Convolutional Neural Network With "Quantum Speedup"Document27 pagesCorrelated Optical Convolutional Neural Network With "Quantum Speedup"jaccneeNo ratings yet
- Weighted Subspace Fitting For Two-Dimension DOA Estimation in Massive MIMO SystemsDocument8 pagesWeighted Subspace Fitting For Two-Dimension DOA Estimation in Massive MIMO SystemsJavier MelendrezNo ratings yet
- ATLAS Simulation of A Laser Diode For Free Space Optical Communication (FSOC) in Mid-Infrared Spectral RegionDocument2 pagesATLAS Simulation of A Laser Diode For Free Space Optical Communication (FSOC) in Mid-Infrared Spectral RegionKrisumraj PurkaitNo ratings yet
- Neural Network Based Energy Efficient Clustering and Routing in Wireless Sensor NetworksDocument6 pagesNeural Network Based Energy Efficient Clustering and Routing in Wireless Sensor NetworksSai Sumanth PNo ratings yet
- Machine Learning-Based Classification of Vector Vortex BeamsDocument7 pagesMachine Learning-Based Classification of Vector Vortex BeamsParag SharmaNo ratings yet
- High Spatial-Temporal Resolution MRI Reconstruction For Speech Production AnalysisDocument10 pagesHigh Spatial-Temporal Resolution MRI Reconstruction For Speech Production AnalysisNANDANA MURALINo ratings yet
- Weak and Strong Coupling Regimes in plasmonic-QED: PACS Numbers: 42.50.ex, 42.79.Gn, 73.20.MfDocument18 pagesWeak and Strong Coupling Regimes in plasmonic-QED: PACS Numbers: 42.50.ex, 42.79.Gn, 73.20.MfMehwishNawazNo ratings yet
- Novel MIMO Detection Algorithm For High-Order Constellations in The Complex DomainDocument14 pagesNovel MIMO Detection Algorithm For High-Order Constellations in The Complex DomainssivabeNo ratings yet
- A Robust Brain MRI Segmentation and Bias Field Cor PDFDocument14 pagesA Robust Brain MRI Segmentation and Bias Field Cor PDFKAPIL KUMAR GUPTANo ratings yet
- Mechanical Properties of Nanostructured Materials: Quantum Mechanics and Molecular Dynamics InsightsFrom EverandMechanical Properties of Nanostructured Materials: Quantum Mechanics and Molecular Dynamics InsightsNo ratings yet
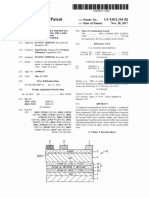
- United States Patent: (45) Date of Patent: Mar - 12, 2019Document17 pagesUnited States Patent: (45) Date of Patent: Mar - 12, 2019profuntressNo ratings yet
- D1 - Us20170205337a1Document23 pagesD1 - Us20170205337a1profuntressNo ratings yet
- D2 - Us20180304033a1Document13 pagesD2 - Us20180304033a1profuntressNo ratings yet
- D2 - Us20190336713a1Document16 pagesD2 - Us20190336713a1profuntressNo ratings yet
- D5 - NPL #2Document10 pagesD5 - NPL #2profuntressNo ratings yet
- US9831310Document19 pagesUS9831310profuntressNo ratings yet
- CN104614073B - Machine TranslationDocument11 pagesCN104614073B - Machine TranslationprofuntressNo ratings yet
- NeuralDocument35 pagesNeuraldepaNo ratings yet
- Lecture 10 - Supervised Learning in Neural Networks - (Part 3)Document2 pagesLecture 10 - Supervised Learning in Neural Networks - (Part 3)Ammar AlkindyNo ratings yet
- Use of Artificial Intelligence To Predict The Accuracy of Pre-Tender Building Cost EstimateDocument17 pagesUse of Artificial Intelligence To Predict The Accuracy of Pre-Tender Building Cost EstimateleeNo ratings yet
- Neural Network Toolbox For Octave Users GuideDocument10 pagesNeural Network Toolbox For Octave Users GuideusernameusernaNo ratings yet
- Dyngem: Deep Embedding Method For Dynamic GraphsDocument8 pagesDyngem: Deep Embedding Method For Dynamic GraphshjjjhjjNo ratings yet
- Data Warehousing & Mining: Unit - IvDocument32 pagesData Warehousing & Mining: Unit - IvSunil Kr PandeyNo ratings yet
- Chapter 16 - MCQDocument5 pagesChapter 16 - MCQSimer FibersNo ratings yet
- Extraction of Weld Seam in 3D Point Clouds For Real Time Welding Using 5 DOF Robotic ArmDocument7 pagesExtraction of Weld Seam in 3D Point Clouds For Real Time Welding Using 5 DOF Robotic ArmMaverick SatNo ratings yet
- A Survey On Word Sense Disambiguation: Agatheeswaran.T, Vigneshwaran.M, Tamilnadu College of Engineering, CoimbatoreDocument22 pagesA Survey On Word Sense Disambiguation: Agatheeswaran.T, Vigneshwaran.M, Tamilnadu College of Engineering, CoimbatoreValerie MooreNo ratings yet
- Updated - Major Minor All SyllabusDocument162 pagesUpdated - Major Minor All Syllabusvanitamane1No ratings yet
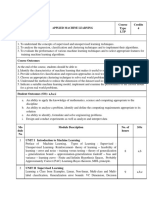
- CSAXXXX Applied Machine LearningDocument3 pagesCSAXXXX Applied Machine LearningAadarsh ChauhanNo ratings yet
- Predicting Short-Term Stock Prices Using Ensemble Methods and Online Data SourcesDocument39 pagesPredicting Short-Term Stock Prices Using Ensemble Methods and Online Data SourcesCNTT-1C-17 Vương Thị Diệu LinhNo ratings yet
- Quiz 02: Deep Learning: November 2020Document2 pagesQuiz 02: Deep Learning: November 2020Istiaq AkbarNo ratings yet
- Inspiration From Neurobiology: Human Biological NeuronDocument47 pagesInspiration From Neurobiology: Human Biological NeuronLalitaditya DivakarlaNo ratings yet
- An End To End Method To Extract InformationDocument10 pagesAn End To End Method To Extract InformationĐƯỜNG TĂNGNo ratings yet
- History of Neural NetworksDocument4 pagesHistory of Neural NetworksAmbrish SinghNo ratings yet
- Practical Guide To KerasDocument28 pagesPractical Guide To KerasfrancoisNo ratings yet
- Deep Learning BookDocument42 pagesDeep Learning Booklady1026100% (1)
- 2012 - Dong Yu - Efficientandeffectivealgorithmsfortrainingsinglehi (Retrieved 2018-01-15)Document5 pages2012 - Dong Yu - Efficientandeffectivealgorithmsfortrainingsinglehi (Retrieved 2018-01-15)ksajjNo ratings yet
- Modern CNN ArchitecturesDocument32 pagesModern CNN ArchitecturesArafat HossainNo ratings yet
- MobilenetV2 (Quantization)Document4 pagesMobilenetV2 (Quantization)Akash BhogarNo ratings yet
- Preliminary Design of Slender Reinforced Concrete Highway Bridge Pier SystemsDocument204 pagesPreliminary Design of Slender Reinforced Concrete Highway Bridge Pier SystemsapirakqNo ratings yet
- Age and Gender DetectionDocument13 pagesAge and Gender DetectionAnurupa bhartiNo ratings yet
- Object-Oriented Rosenblatt Perceptron Using C++Document30 pagesObject-Oriented Rosenblatt Perceptron Using C++Sam BixlerNo ratings yet
- CS7015 (Deep Learning) : Lecture 1Document108 pagesCS7015 (Deep Learning) : Lecture 1vidhya dsNo ratings yet
- Learn Outlier Detection in Python PyOD Library 1566237490Document23 pagesLearn Outlier Detection in Python PyOD Library 1566237490Douglas SouzaNo ratings yet
- Visionsystemsdesign201801 DL PDFDocument36 pagesVisionsystemsdesign201801 DL PDFayachimonaamNo ratings yet
- Tennis PredictionsDocument13 pagesTennis PredictionsGrinCurtisNo ratings yet
- IoT Developing An Engineering and Business Strategyfor Industry 5.0-Wiley (2021)Document306 pagesIoT Developing An Engineering and Business Strategyfor Industry 5.0-Wiley (2021)lyanamangoNo ratings yet