You might also like
- Aeroservoelastic Modeling, Analysis, and Design Techniques PDFDocument12 pagesAeroservoelastic Modeling, Analysis, and Design Techniques PDFkarthekeyanmenonNo ratings yet
- Reliable Robust Flight Tracking Control: An LMI ApproachDocument14 pagesReliable Robust Flight Tracking Control: An LMI ApproachPriyanka ChowdaryNo ratings yet
- Design and Analysis of An Integral Sliding Mode Fault Tolerant Control SchemeDocument6 pagesDesign and Analysis of An Integral Sliding Mode Fault Tolerant Control SchemeTaddese DiribaNo ratings yet
- Refference CheckDocument5 pagesRefference CheckQuyết Nguyễn CôngNo ratings yet
- Open Research Exeter: TitleDocument9 pagesOpen Research Exeter: TitleredwaneNo ratings yet
- Text of AeroDocument9 pagesText of Aerokilicalemdar883No ratings yet
- A Bottom-Following Preview Controller For Autonomous Underwater VehiclesDocument10 pagesA Bottom-Following Preview Controller For Autonomous Underwater Vehiclesbala985No ratings yet
- Robust Optimal Control of Quadrotor Uavs: Received February 13, 2013, Accepted April 16, 2013, Published May 10, 2013Document15 pagesRobust Optimal Control of Quadrotor Uavs: Received February 13, 2013, Accepted April 16, 2013, Published May 10, 2013keshandass4724No ratings yet
- Reconfigurable Control Design With Integration of A Reference Governor and Reliability IndicatorsDocument10 pagesReconfigurable Control Design With Integration of A Reference Governor and Reliability IndicatorsbenNo ratings yet
- Prioritized Control Allocation For Quadrotors Subject To SaturationDocument7 pagesPrioritized Control Allocation For Quadrotors Subject To SaturationARTH PATELNo ratings yet
- Slotine Li Tac 88Document9 pagesSlotine Li Tac 88Linh Chi NguyenNo ratings yet
- Cooperative Control of Multiple QuadrotoDocument10 pagesCooperative Control of Multiple QuadrotoTomislav SertićNo ratings yet
- Tsourdos2005 Adaptive Flight Control Design For Nonlinear MissileDocument10 pagesTsourdos2005 Adaptive Flight Control Design For Nonlinear MissileSaeb AmirAhmadi ChomacharNo ratings yet
- An Improved Methodology For The Design of Power System Damping ControllersDocument8 pagesAn Improved Methodology For The Design of Power System Damping ControllersFernando RamosNo ratings yet
- Active Fault Tolerant Control Strategy of Large Civil Aircraft Under Elevator FailuresDocument9 pagesActive Fault Tolerant Control Strategy of Large Civil Aircraft Under Elevator Failuresnaren nNo ratings yet
- Sliding Mode Methods For Fault Detection and Fault Tolerant ControlDocument12 pagesSliding Mode Methods For Fault Detection and Fault Tolerant ControljopiterNo ratings yet
- Ijsetr Vol 7 Issue 7 467 472Document6 pagesIjsetr Vol 7 Issue 7 467 472Dana Chalyng'sNo ratings yet
- Automatic Tuning Method For The Design of Supplementary Damping Controllers For Exible Alternating Current Transmission System DevicesDocument11 pagesAutomatic Tuning Method For The Design of Supplementary Damping Controllers For Exible Alternating Current Transmission System DevicesFernando RamosNo ratings yet
- Optimal Tracking Control of Motion SystemsDocument11 pagesOptimal Tracking Control of Motion Systemsmousa bagherpourjahromiNo ratings yet
- Modeling and Control of Unmanned Aerial Vehicle: D. Y. Dube R. K. MunjeDocument4 pagesModeling and Control of Unmanned Aerial Vehicle: D. Y. Dube R. K. MunjeMahdi LabedNo ratings yet
- Camopa 2004Document12 pagesCamopa 2004highwattNo ratings yet
- A Novel Control-Schedule Codesign Method For Embedded Control SystemsDocument6 pagesA Novel Control-Schedule Codesign Method For Embedded Control SystemsCarlos Daniel ArmentaNo ratings yet
- Application Research of Mrac in Fault Tolerant Flight ControllerDocument10 pagesApplication Research of Mrac in Fault Tolerant Flight ControllerNilesh LambeNo ratings yet
- Adaptive Backstepping Fault Tolerant Control For Flexible Spacecraft With Unknown Bounded Disturbances and Actuator Failures 2010 ISA TransactionsDocument13 pagesAdaptive Backstepping Fault Tolerant Control For Flexible Spacecraft With Unknown Bounded Disturbances and Actuator Failures 2010 ISA TransactionsAravindan MohanNo ratings yet
- Georg 2013Document7 pagesGeorg 2013t123medNo ratings yet
- Nonlinear Control Design Using Takagi-Sugeno Fuzzy Applied To Under-Actuated Visual Servo SystemDocument15 pagesNonlinear Control Design Using Takagi-Sugeno Fuzzy Applied To Under-Actuated Visual Servo SystemdangquanginhaNo ratings yet
- Non Linearities Flight ControlsDocument14 pagesNon Linearities Flight ControlsFabián AcevedoNo ratings yet
- Magnitudeand SymmetricoptimumDocument10 pagesMagnitudeand Symmetricoptimumpatelkuldip050No ratings yet
- Generalized Self-Tuning Regulator Based On Online Support VectorDocument27 pagesGeneralized Self-Tuning Regulator Based On Online Support VectorAkustika Horoz100% (1)
- Model-In-The-Loop Testing: AbstractDocument17 pagesModel-In-The-Loop Testing: AbstractRamanNo ratings yet
- Gain Scheduled Reduced Order Output FeedbackDocument13 pagesGain Scheduled Reduced Order Output FeedbackKệ ThôiNo ratings yet
- 23 Control of Machine ToolsDocument7 pages23 Control of Machine Toolskhalil alhatabNo ratings yet
- Design of Robust Fuzzy Controllers For Aerospace ApplicationsDocument5 pagesDesign of Robust Fuzzy Controllers For Aerospace ApplicationsRitesh SinghNo ratings yet
- R. Hayat, M. BussDocument8 pagesR. Hayat, M. BussSadiqNo ratings yet
- Terminal Sliding ModesDocument4 pagesTerminal Sliding ModesAldin BeganovicNo ratings yet
- Throttle Tracking Poz Ach VidDocument7 pagesThrottle Tracking Poz Ach Vidyolanda.vidalNo ratings yet
- Adaptive Control of Uncertain Gear Transmission Servo Systems With Deadzone NonlinearityDocument9 pagesAdaptive Control of Uncertain Gear Transmission Servo Systems With Deadzone Nonlinearitysaleh1978No ratings yet
- A Dual Quaternion Linear-Quadratic Optimal Controller For Trajectory TrackingDocument6 pagesA Dual Quaternion Linear-Quadratic Optimal Controller For Trajectory TrackingGerardo HernándezNo ratings yet
- Valve Controller Design of Multi-Machine Power Systems Based On Adaptive Hamilton Minimax MethodDocument8 pagesValve Controller Design of Multi-Machine Power Systems Based On Adaptive Hamilton Minimax MethodsivaNo ratings yet
- Of Facts In: Modeling Power System StudiesDocument5 pagesOf Facts In: Modeling Power System StudiesAzaldo SalvadorNo ratings yet
- Predictive Adaptive Cruise Control Using A Customized ECUDocument13 pagesPredictive Adaptive Cruise Control Using A Customized ECUnhatvpNo ratings yet
- Modern Power System Analysis ToolsDocument6 pagesModern Power System Analysis ToolsElliott M.No ratings yet
- Enhanced Backstepping Controller Design With ApplicationDocument27 pagesEnhanced Backstepping Controller Design With ApplicationmohammedNo ratings yet
- PSO Technique Applied To Sensorless Field-Oriented Control PMSM Drive With Discretized RL-fractional IntegralDocument12 pagesPSO Technique Applied To Sensorless Field-Oriented Control PMSM Drive With Discretized RL-fractional IntegralfvijayamiNo ratings yet
- Output-Feedback Control of Container Cranes: A Comparative AnalysisDocument16 pagesOutput-Feedback Control of Container Cranes: A Comparative AnalysisjavbejaranoNo ratings yet
- Advanced Model Based Control of A 6DOF HDocument11 pagesAdvanced Model Based Control of A 6DOF HQaim RazaNo ratings yet
- An Optimal 3D Analytical Solution For Collision Avoidance Between AircraftDocument9 pagesAn Optimal 3D Analytical Solution For Collision Avoidance Between AircraftAnonymous t5MrKaXDNo ratings yet
- Finite-Time Backstepping Control For Quadrotors With Disturbances and Input ConstraintsDocument13 pagesFinite-Time Backstepping Control For Quadrotors With Disturbances and Input ConstraintselhamNo ratings yet
- Simulation of Optimal Speed Control For A DC Motor Using Linear Quadratic Regulator (LQR)Document10 pagesSimulation of Optimal Speed Control For A DC Motor Using Linear Quadratic Regulator (LQR)naghamNo ratings yet
- ChiCC 2019 8865370Document6 pagesChiCC 2019 8865370Lê Đức ThịnhNo ratings yet
- 054 Baykov AviaSpace 2019.editedDocument9 pages054 Baykov AviaSpace 2019.editedRomanNo ratings yet
- Gain-Scheduled Reusable Launch Vehicle Attitude Controller DesignDocument5 pagesGain-Scheduled Reusable Launch Vehicle Attitude Controller DesignbennyNo ratings yet
- Application Research of MRAC in Fault-Tolerant Flight ControllerDocument8 pagesApplication Research of MRAC in Fault-Tolerant Flight ControlleradcadNo ratings yet
- 15 Chapter15 CorrectedDocument54 pages15 Chapter15 CorrectedSHUBHAM SAININo ratings yet
- RLV Reenrty PhasDocument6 pagesRLV Reenrty PhasShubham KaduNo ratings yet
- Juan Manuel Mauricio 2008Document11 pagesJuan Manuel Mauricio 2008oualid zouggarNo ratings yet
- Seamless Dynamics For Wild-Frequency Active Rectifiers in More Electric AircraftDocument11 pagesSeamless Dynamics For Wild-Frequency Active Rectifiers in More Electric AircraftBadal PatnaikNo ratings yet
- CNC BacklushDocument14 pagesCNC BacklushjegrmdeNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Semi-Markov Models: Control of Restorable Systems with Latent FailuresFrom EverandSemi-Markov Models: Control of Restorable Systems with Latent FailuresNo ratings yet
- Biological Science 6th Edition Freeman Test BankDocument24 pagesBiological Science 6th Edition Freeman Test BankSheilaClarktofa100% (46)
- Fiitjee - Phase Test (JEE-Advanced) : Physics, Chemistry & MathematicsDocument10 pagesFiitjee - Phase Test (JEE-Advanced) : Physics, Chemistry & MathematicsKumbhar SaketNo ratings yet
- Physics-Investigatory To Find The Refractive Indices of (A) Water (B) Oil (Transparent) Using A Plane Mirror, An Equiconvex LensDocument16 pagesPhysics-Investigatory To Find The Refractive Indices of (A) Water (B) Oil (Transparent) Using A Plane Mirror, An Equiconvex LensHemnathpalaniNo ratings yet
- Aspirateur MTL300BL-001Document2 pagesAspirateur MTL300BL-001volganoteNo ratings yet
- The Photoconductive CellDocument2 pagesThe Photoconductive Celldev achandyNo ratings yet
- Reed'S General Engineering Knowledge FOR Marine Engineers: Leslie JacksonDocument265 pagesReed'S General Engineering Knowledge FOR Marine Engineers: Leslie JacksonJose RamonNo ratings yet
- Dental Material MCQ Test Bank. Chapter - 009Document17 pagesDental Material MCQ Test Bank. Chapter - 009Táláát ÄlsuroriNo ratings yet
- Understanding LED Dimming: Application Note 107Document9 pagesUnderstanding LED Dimming: Application Note 107firdaus42No ratings yet
- PCB Trace Resistance Calculator - Any Trace in A PCB PDFDocument4 pagesPCB Trace Resistance Calculator - Any Trace in A PCB PDFParasaram SrinivasNo ratings yet
- Thermoelastic Analysis of A Thin Circular Plate With Radiation Type ConditionsDocument6 pagesThermoelastic Analysis of A Thin Circular Plate With Radiation Type ConditionssijyvinodNo ratings yet
- ABB Transformers MV Medium Voltage Transformers GuideDocument4 pagesABB Transformers MV Medium Voltage Transformers GuideHossam AlzubairyNo ratings yet
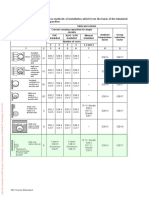
- Table 52B.1 - Schedule of Reference Methods of Installation Which Form The Basis of The Tabulated Current-Carrying CapacitiesDocument1 pageTable 52B.1 - Schedule of Reference Methods of Installation Which Form The Basis of The Tabulated Current-Carrying CapacitiesMihaela AntonNo ratings yet
- Chapter 10: GROUP 2Document4 pagesChapter 10: GROUP 2Luk HKNo ratings yet
- Installation and User Manual For The FX Range of Fire Panels 1, 2, 4 and 8 Zone PanelsDocument10 pagesInstallation and User Manual For The FX Range of Fire Panels 1, 2, 4 and 8 Zone PanelsNesil AbieraNo ratings yet
- Module 3 ADocument10 pagesModule 3 AProdyot SinhaNo ratings yet
- The S - Block ElementsDocument1 pageThe S - Block ElementsRunjhunNo ratings yet
- Module 6 The Laws of MotionDocument9 pagesModule 6 The Laws of MotionDAGUMAN, FIONA DEI L.No ratings yet
- Chang Problems Chapter 8Document9 pagesChang Problems Chapter 8ChaNo ratings yet
- MIT8 07F12 FinalexamDocument6 pagesMIT8 07F12 FinalexamEmanuel Chilanda MangoNo ratings yet
- Hexane (Food Grade)Document11 pagesHexane (Food Grade)Tipu PahanNo ratings yet
- (копия)Document2 pages(копия)DaLLaSNo ratings yet
- SMC-3 Specs PDFDocument3 pagesSMC-3 Specs PDFManuelNo ratings yet
- High-Resolution Micromachined Interferometric AccelerometerDocument75 pagesHigh-Resolution Micromachined Interferometric AccelerometerjitendraNo ratings yet
- GR 12 AP Maths Prelim Exam Paper 1 September 2020Document8 pagesGR 12 AP Maths Prelim Exam Paper 1 September 2020nkosingphileNo ratings yet
- Hospital Product Application GuideDocument49 pagesHospital Product Application GuidepavloneNo ratings yet
- Dunman High School 2009 Maths D Paper 2Document14 pagesDunman High School 2009 Maths D Paper 2ZeneonNo ratings yet
- Vibrodynamics - HH48Document2 pagesVibrodynamics - HH48Andrzej RogalaNo ratings yet
- Vanderfleet, Cranston - 2021 - Production Routes To Tailor The Performance of Cellulose NanocrystalsDocument21 pagesVanderfleet, Cranston - 2021 - Production Routes To Tailor The Performance of Cellulose Nanocrystalscat.zeNo ratings yet
- 2.3-Data-Communication Ver2Document46 pages2.3-Data-Communication Ver2Llal SantiagoNo ratings yet
- Calc. Shell Thickness SiloDocument29 pagesCalc. Shell Thickness SiloJunaid MateenNo ratings yet