You might also like
- Ch11-Dynamic Behavior & Stability of Closed-Loop Control System.Document15 pagesCh11-Dynamic Behavior & Stability of Closed-Loop Control System.Mark GoodmoreNo ratings yet
- Flexible Pavement Design - Page 3Document1 pageFlexible Pavement Design - Page 3RigonDECNo ratings yet
- CLA EchoSphereDocument9 pagesCLA EchoSphereJorge Caicedo RojasNo ratings yet
- QPSK Digital Modulation Simulation Using MATLAB: Quadrature Phase Shift KeyingDocument6 pagesQPSK Digital Modulation Simulation Using MATLAB: Quadrature Phase Shift KeyingJaweria Jaffar AliNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Electrical Network Transfer FunctionDocument21 pagesElectrical Network Transfer FunctionRyan Arce100% (2)
- 2018 00 Pro 04 Biplanes PDFDocument12 pages2018 00 Pro 04 Biplanes PDFAndreu GimenezNo ratings yet
- Transcript PDFDocument1 pageTranscript PDFOlee Gerato100% (1)
- Single Tuned CircuitsDocument6 pagesSingle Tuned CircuitsMansi Arpit NanavatiNo ratings yet
- PST Unit 2Document12 pagesPST Unit 2Karthick Sivakumar ChellamuthuNo ratings yet
- Chapter 2 - Reduction of Multiple SystemDocument22 pagesChapter 2 - Reduction of Multiple SystemMustafa ManapNo ratings yet
- Chapter 3Document37 pagesChapter 3Izzat AiresNo ratings yet
- Analog and Digital Electronics 67 Important MCQ: All Exam Review AddaDocument12 pagesAnalog and Digital Electronics 67 Important MCQ: All Exam Review AddaNoor AhmedNo ratings yet
- Robotics1 11.06.17Document5 pagesRobotics1 11.06.17Ammar BendjeddouNo ratings yet
- 05ControlSystems Sol 1651Document19 pages05ControlSystems Sol 1651amithbaluNo ratings yet
- FUee10 Petar01Document10 pagesFUee10 Petar01Стефан ПанићNo ratings yet
- 843uf CS-ABCDocument16 pages843uf CS-ABCMarshaNo ratings yet
- SFG 2Document14 pagesSFG 2Emmanuel AmoakoNo ratings yet
- Fractional-Step Tow-Thomas Biquad Filters: Nolta, IeiceDocument18 pagesFractional-Step Tow-Thomas Biquad Filters: Nolta, Ieice蓝蓝のDoraemonNo ratings yet
- 自动控制理论 第三版 答案(夏德钤 翁贻方)Document35 pages自动控制理论 第三版 答案(夏德钤 翁贻方)Wade ZhangNo ratings yet
- Problem 5.31: SolutionDocument3 pagesProblem 5.31: Solutionali ahmedNo ratings yet
- Industrial Control: Assignment IIDocument12 pagesIndustrial Control: Assignment IIOMAR ALEJANDRO LONGORIA VAZQUEZNo ratings yet
- Tutorial 6Document2 pagesTutorial 6Saransh MittalNo ratings yet
- Boise State University Department of Electrical and Computer Engineering ECE 225 Circuit Analysis and Design Spring 2010Document6 pagesBoise State University Department of Electrical and Computer Engineering ECE 225 Circuit Analysis and Design Spring 2010Matthew DolanNo ratings yet
- Controls Systems ExamplesDocument67 pagesControls Systems ExamplesUpender Rao SunkishalaNo ratings yet
- EE 371 Control Systems Exam II, Spring 1997 Solution: Ee Dept. Univ. of Nevada, RenoDocument3 pagesEE 371 Control Systems Exam II, Spring 1997 Solution: Ee Dept. Univ. of Nevada, RenoAmal AhmedNo ratings yet
- Lab No. 5 Vector MeasurementsDocument14 pagesLab No. 5 Vector Measurementsmihaela0chiorescuNo ratings yet
- 2labman lcr7Document8 pages2labman lcr7RufosNo ratings yet
- Control SystemsDocument3 pagesControl SystemsMauricio OñoroNo ratings yet
- Control Strategy: Single Input and Single Output With Unit FeedbackDocument4 pagesControl Strategy: Single Input and Single Output With Unit FeedbackmulyanaNo ratings yet
- ME 325 ControlSystems Lecture RootLocusMethodDocument55 pagesME 325 ControlSystems Lecture RootLocusMethodBhukya PramodNo ratings yet
- ME 380 Chapter 2 HW Solution: Review QuestionsDocument5 pagesME 380 Chapter 2 HW Solution: Review QuestionsVisakan ParameswaranNo ratings yet
- Ee 2005Document20 pagesEe 2005phoenix226No ratings yet
- 100cia Tec 2020Document9 pages100cia Tec 2020fernandoNo ratings yet
- 990uf Eeec-ControlDocument25 pages990uf Eeec-ControlMarshaNo ratings yet
- Signal Processing: Design of IIR FiltersDocument94 pagesSignal Processing: Design of IIR FiltersTrần Nhật DươngNo ratings yet
- EEE3001 Software ManualDocument34 pagesEEE3001 Software ManualManuDubeyNo ratings yet
- The Inverting IntegratorDocument6 pagesThe Inverting Integratornaveenbabu19No ratings yet
- Gshs Gshs S K: GivenDocument1 pageGshs Gshs S K: Givenravi raviNo ratings yet
- 3 ErrataDocument4 pages3 ErrataPJBNo ratings yet
- EE-211 Linear Circuit Analysis: Dr. Hadeed Ahmed SherDocument32 pagesEE-211 Linear Circuit Analysis: Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- E343 F20 Lecture 2 Modeling SlidesDocument32 pagesE343 F20 Lecture 2 Modeling SlidesMOHAMMED ALI MOHAMMED ZABBANINo ratings yet
- Derivadas de Funcion ZDocument8 pagesDerivadas de Funcion ZJuan PozoNo ratings yet
- P0822Document4 pagesP0822Adnan KhaldunNo ratings yet
- CP1 AceDocument3 pagesCP1 AceSamuel MiramontesNo ratings yet
- Mid Sem 3Document11 pagesMid Sem 3BROJO CHAND GAYENNo ratings yet
- Electronics Sample Paper 5Document12 pagesElectronics Sample Paper 5gunasekaran kNo ratings yet
- Phase Lead Compensator Design Project Mauricio Oñoro: Figure 1 Circuit To Be ControlledDocument8 pagesPhase Lead Compensator Design Project Mauricio Oñoro: Figure 1 Circuit To Be ControlledMauricio OñoroNo ratings yet
- FEEDBACK CONTROL SYSTEM LESSON 1 Part 2Document3 pagesFEEDBACK CONTROL SYSTEM LESSON 1 Part 2bayletmark0No ratings yet
- Effect of Pole and Zero On Stability With ExampleDocument13 pagesEffect of Pole and Zero On Stability With ExampleThulasi ramNo ratings yet
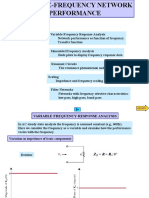
- Variable Frequency NW AnalysisDocument35 pagesVariable Frequency NW AnalysisEngr. Afshan ishaq Electronics ABTNo ratings yet
- Mathematics DPP NO. 69 (Advanced) JEE (Main-Advanced) 2021Document2 pagesMathematics DPP NO. 69 (Advanced) JEE (Main-Advanced) 2021MeenaNo ratings yet
- Compensation Design From LinearDocument39 pagesCompensation Design From LinearTrung Nguyen ChiNo ratings yet
- SC617 EndtermDocument5 pagesSC617 EndtermHarshil NaikNo ratings yet
- 'Enter The Sequence': ProgramDocument6 pages'Enter The Sequence': ProgramlivingstonNo ratings yet
- Network Functions and S-Domain AnalysisDocument22 pagesNetwork Functions and S-Domain AnalysispowerdeadlifterNo ratings yet
- Calculation of Shock Response Spectrum: VSB - TU of Ostrava Faculty of Mechanical Engineering Jiří Tůma & Petr KočíDocument16 pagesCalculation of Shock Response Spectrum: VSB - TU of Ostrava Faculty of Mechanical Engineering Jiří Tůma & Petr KočíwizgigNo ratings yet
- Assignment 1Document14 pagesAssignment 1aneebaNo ratings yet
- Transfer Function of Physical SystemsDocument3 pagesTransfer Function of Physical SystemsRajalaxmiNo ratings yet
- Topic04 Reviewed Add02Document4 pagesTopic04 Reviewed Add02super junlinNo ratings yet
- EE3331C Feedback Control Systems L7: Control System Performance: Transient & Steady-StateDocument30 pagesEE3331C Feedback Control Systems L7: Control System Performance: Transient & Steady-Statepremsanjith subramaniNo ratings yet
- Digital Color Cameras - Spectral ResponseDocument32 pagesDigital Color Cameras - Spectral ResponseJorge LeandroNo ratings yet
- Spra 420 ADocument62 pagesSpra 420 AGIRINITH RNo ratings yet
- SMPC - VRamnarayanan 181 189Document9 pagesSMPC - VRamnarayanan 181 189GIRINITH RNo ratings yet
- Stucor - Ma8402 DJ 141 160Document20 pagesStucor - Ma8402 DJ 141 160GIRINITH RNo ratings yet
- KHB Can BusDocument5 pagesKHB Can BusGIRINITH RNo ratings yet
- Daly BMS Data - Daly BMS DataDocument1 pageDaly BMS Data - Daly BMS DataGIRINITH RNo ratings yet
- Editing Canbus MessagesDocument20 pagesEditing Canbus MessagesGIRINITH RNo ratings yet
- Fa170 Installation ManualDocument82 pagesFa170 Installation ManualHerdian Trias SumadinataNo ratings yet
- EE-211 Circuit Analysis: Dr. Hadeed Ahmed SherDocument22 pagesEE-211 Circuit Analysis: Dr. Hadeed Ahmed SherHadeedAhmedSher0% (1)
- Mvs JCL Reference PDFDocument700 pagesMvs JCL Reference PDFGokul KrishnamoorthyNo ratings yet
- Microstructure & Mechanical Property 1988 (SA-516 Gr.70) (OK) PDFDocument6 pagesMicrostructure & Mechanical Property 1988 (SA-516 Gr.70) (OK) PDFhoangviet20006No ratings yet
- NV500 Tech BrochureDocument2 pagesNV500 Tech BrochurelzertcNo ratings yet
- Ahmed Mohammed: Professional SummaryDocument5 pagesAhmed Mohammed: Professional SummaryvishuchefNo ratings yet
- Chapter 5 Review AnswersDocument4 pagesChapter 5 Review AnswersMOHA DOOYOWNo ratings yet
- 5.1-5.5 Guided Notes: If 15° and 52°, What Is ?Document3 pages5.1-5.5 Guided Notes: If 15° and 52°, What Is ?2020 MistakesNo ratings yet
- Milling and Machining CentersDocument5 pagesMilling and Machining CentersJose JulianNo ratings yet
- Che-01 IgnouDocument8 pagesChe-01 IgnouRamBabuMeenaNo ratings yet
- PROJECTDocument34 pagesPROJECTBiswajit PaulNo ratings yet
- High OutputDocument36 pagesHigh Outputxmen norNo ratings yet
- Platinum Natural Science Grade 8 Topic 4Document3 pagesPlatinum Natural Science Grade 8 Topic 4Nellie van Tonder50% (2)
- P5 Assessment Paper - 2017 15 QuestionsDocument6 pagesP5 Assessment Paper - 2017 15 QuestionsNachammaiNachiappanNo ratings yet
- UFK W AftercoolerDocument3 pagesUFK W AftercoolerLiem NguyenNo ratings yet
- Cs 2Document2 pagesCs 2Achietots CabarioNo ratings yet
- Analysis of Precast Multistoreyed Building - A Case Study: I J I R S E TDocument9 pagesAnalysis of Precast Multistoreyed Building - A Case Study: I J I R S E TalexanderNo ratings yet
- SSM College of Engineering and Technology: Seminar ReportDocument6 pagesSSM College of Engineering and Technology: Seminar ReportMirAdilNo ratings yet
- Solved Problems: SolutionDocument30 pagesSolved Problems: SolutionLucky DeltaNo ratings yet
- Paper No.: 12 Paper Title: Food Packaging Technology Module - 16: Packaging of Snack FoodsDocument7 pagesPaper No.: 12 Paper Title: Food Packaging Technology Module - 16: Packaging of Snack FoodsM SNo ratings yet
- Diversity, Ecology, Mother Trees, and Conservationof Ulin (Eusideroxylon Zwageri Teijsm. Et Binnend.) in Kalimantan)Document14 pagesDiversity, Ecology, Mother Trees, and Conservationof Ulin (Eusideroxylon Zwageri Teijsm. Et Binnend.) in Kalimantan)Maria YasintaNo ratings yet
- Topic Models in Natural Language ProcessingDocument64 pagesTopic Models in Natural Language ProcessingriteshNo ratings yet
- PMP Test Killer PDFDocument336 pagesPMP Test Killer PDFLukman Hakim100% (1)
- Course Outline PDFDocument12 pagesCourse Outline PDFBelen HumiwatNo ratings yet
- Smart Portal: A Platform For Student's Profile Creation, Evaluation and ClusteringDocument6 pagesSmart Portal: A Platform For Student's Profile Creation, Evaluation and ClusteringVIVA-TECH IJRINo ratings yet
- Wolf HD Endocam - User ManualDocument56 pagesWolf HD Endocam - User ManualAhmed 771000303No ratings yet
- Summarize Topic in StatisticalDocument5 pagesSummarize Topic in StatisticalBanesa AsistioNo ratings yet