You might also like
- Fingerboard Geometry - Michael ManringDocument3 pagesFingerboard Geometry - Michael ManringNhoel EscolanoNo ratings yet
- Pdca ExampleDocument1 pagePdca Examplerahul kavirajNo ratings yet
- Module 5 E Comm Internet MarketingDocument25 pagesModule 5 E Comm Internet MarketingJoshua BarracaNo ratings yet
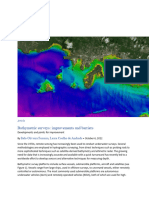
- Multiple Methods Can Be Used For Bathymetric SurveysDocument10 pagesMultiple Methods Can Be Used For Bathymetric SurveysGaurav RajNo ratings yet
- (MDI Series) - This Catalogue Is Updated As On 1st September, 2008Document46 pages(MDI Series) - This Catalogue Is Updated As On 1st September, 2008rahul mehta100% (1)
- Underwater Acoustic Positioning SystemDocument6 pagesUnderwater Acoustic Positioning SystemalphadingNo ratings yet
- Residual Oil Saturation: The Information You Should Know About SeismicDocument9 pagesResidual Oil Saturation: The Information You Should Know About SeismicOnur AkturkNo ratings yet
- Acoustic Seafloor MappingDocument18 pagesAcoustic Seafloor MappingmanishbabuNo ratings yet
- WPC Wall Panel of BAIJAXDocument16 pagesWPC Wall Panel of BAIJAXanand gowdaNo ratings yet
- Future of Robotics Agriculture 1Document36 pagesFuture of Robotics Agriculture 1Asma RafiqNo ratings yet
- 2010 CV 251 (Hydrographic Surveying)Document5 pages2010 CV 251 (Hydrographic Surveying)Adil FaiyazNo ratings yet
- The HUGIN Concept, HUGIN As A Multi Purpose Platform For Marine Research.Document8 pagesThe HUGIN Concept, HUGIN As A Multi Purpose Platform For Marine Research.Ruben PatelNo ratings yet
- Hydrographic SurveyDocument16 pagesHydrographic SurveyCristian Gavrilescu100% (1)
- Autonomous Underwater Vehicle (AUV)Document44 pagesAutonomous Underwater Vehicle (AUV)Arjun Pratap Singh100% (1)
- ABENDI & ASME Workshop - N Finney W Hembree - Section VDocument114 pagesABENDI & ASME Workshop - N Finney W Hembree - Section VMarciel AmorimNo ratings yet
- Ansys Icepak Users GuideDocument1,110 pagesAnsys Icepak Users GuideEsa0% (1)
- Pipeline Inspection With Interferometric SASDocument5 pagesPipeline Inspection With Interferometric SASВалерий ГерасимовичNo ratings yet
- The Autonomous Underwater Vehicle (AUV) : A Cost-Effective Alternative To Deep-Towed TechnologyDocument5 pagesThe Autonomous Underwater Vehicle (AUV) : A Cost-Effective Alternative To Deep-Towed Technologyaarthi devNo ratings yet
- Energies 13 05637Document20 pagesEnergies 13 05637Muhammad Osama SaeedNo ratings yet
- 2014 Passaro Et AlDocument18 pages2014 Passaro Et AlMaya Eria SinuratNo ratings yet
- Aanderaa Application Support Package 5Document20 pagesAanderaa Application Support Package 5Saut Remanto SamosirNo ratings yet
- Underwater Objects Detection System Choice For HaDocument13 pagesUnderwater Objects Detection System Choice For HaTrầnHữuHòaNo ratings yet
- Sonar Explorer: A New Tool For Visualization of Fish Schools From 3D Sonar DataDocument9 pagesSonar Explorer: A New Tool For Visualization of Fish Schools From 3D Sonar DataawiuefhaliuefbNo ratings yet
- Remotesensing 12 04076 v2Document23 pagesRemotesensing 12 04076 v2Matt HoulsonNo ratings yet
- 1 s2.0 S0029801823029700 MainDocument13 pages1 s2.0 S0029801823029700 MainJarul RozkiNo ratings yet
- Large Aperture Low Cost Hydrophone Array For Tracking Whales From Small BoatsDocument10 pagesLarge Aperture Low Cost Hydrophone Array For Tracking Whales From Small BoatsBrendon SoongNo ratings yet
- Shooting Seismic Surveys in CirclesDocument14 pagesShooting Seismic Surveys in CirclesRidwanNo ratings yet
- Subsea PipelineDocument11 pagesSubsea PipelineSilvioEgMeloNo ratings yet
- Acoustic Remote Sensing in Maritime Archaeology - Rory QuinnDocument22 pagesAcoustic Remote Sensing in Maritime Archaeology - Rory QuinnDarko KovacevicNo ratings yet
- Remote SensingDocument24 pagesRemote SensingNyeinchan MinNo ratings yet
- (Paperhub - Ir) 10.1088 1757-899x 209 1 012098Document11 pages(Paperhub - Ir) 10.1088 1757-899x 209 1 012098Rebecca JohnsonNo ratings yet
- Bathymetry TalksDocument16 pagesBathymetry TalksEmmanuel WusuNo ratings yet
- Application of Large Scale Particle Image VelocimeDocument7 pagesApplication of Large Scale Particle Image Velocimekuochen.hsieh19No ratings yet
- Administrator, 1043799arDocument16 pagesAdministrator, 1043799arvesmsxNo ratings yet
- Wave GliderDocument3 pagesWave Glidervenkatesh1992No ratings yet
- A2 CA PipelinemonitoringDocument3 pagesA2 CA PipelinemonitoringMakerbot JneNo ratings yet
- Assigment GSS411 Branches of Geomatics 2022977645Document13 pagesAssigment GSS411 Branches of Geomatics 2022977645MUHAMMAD NADZIF SAHIMINo ratings yet
- Land Streamers V 3Document10 pagesLand Streamers V 3PoPandaNo ratings yet
- Combined Use of Traditional Core Logging and Televiewer Imaging For Practical Geotechnical Data CollectionDocument14 pagesCombined Use of Traditional Core Logging and Televiewer Imaging For Practical Geotechnical Data Collectionsukri arjunaNo ratings yet
- Slope Stability Radar For Monitoring Mine WallsDocument4 pagesSlope Stability Radar For Monitoring Mine WallslaloNo ratings yet
- Predicting Future Shoreline in Red Sea Area: Geomatics StudyDocument10 pagesPredicting Future Shoreline in Red Sea Area: Geomatics Studyamro elsadig elsadigNo ratings yet
- Monitoreo Geofisico 4d CcsDocument185 pagesMonitoreo Geofisico 4d CcsJulian De BedoutNo ratings yet
- 17 102 GrayDocument18 pages17 102 GrayBasem MohamedNo ratings yet
- Cruise Report - Sandwaves and Sand Transport On The Barents Sea Continental Margin Offshore NorwayDocument77 pagesCruise Report - Sandwaves and Sand Transport On The Barents Sea Continental Margin Offshore NorwayDimahya chanelNo ratings yet
- Sensors 12 03693 Tabla ResumenDocument27 pagesSensors 12 03693 Tabla ResumenmapasabcNo ratings yet
- Gasquant - Hydroacoustic Monitoring of A Natural Gas Seep Field (Tommeliten, North Sea)Document9 pagesGasquant - Hydroacoustic Monitoring of A Natural Gas Seep Field (Tommeliten, North Sea)ajacks504No ratings yet
- Presented by Imtiaz Ahmed KhanDocument37 pagesPresented by Imtiaz Ahmed KhanImtiaz Ahmed KhanNo ratings yet
- Paper1-UNDERWATER Acoustic Positioning SystemDocument33 pagesPaper1-UNDERWATER Acoustic Positioning SystemNovi AniNo ratings yet
- Pipeline Leakage Detection and Localization Using Distributed Fiber Optic SensingDocument2 pagesPipeline Leakage Detection and Localization Using Distributed Fiber Optic SensingNaveen GuptaNo ratings yet
- Jmse 05 00025 v2Document16 pagesJmse 05 00025 v2Sam ShresthaNo ratings yet
- Underwater Acoustic Sensor Networks: Research Challenges: Ian F. Akyildiz, Dario Pompili, Tommaso MelodiaDocument23 pagesUnderwater Acoustic Sensor Networks: Research Challenges: Ian F. Akyildiz, Dario Pompili, Tommaso MelodiaMoses TorkudzorNo ratings yet
- 1-s2.0-S187661021502915X-main CivDocument9 pages1-s2.0-S187661021502915X-main CivCorina OliverNo ratings yet
- Measuring The Speed Through Water by Wavex: by Dr. Scient. Rune GangeskarDocument10 pagesMeasuring The Speed Through Water by Wavex: by Dr. Scient. Rune GangeskarPrinceSadhotraNo ratings yet
- Leak Detection Methods FOR Subsea Pipelines B K C B.S - (H) Amim EST S A S, P O LDocument4 pagesLeak Detection Methods FOR Subsea Pipelines B K C B.S - (H) Amim EST S A S, P O LKemahyanto Exaudi SiahaanNo ratings yet
- Study On Control System of Integrated Unmanned Surface Vehicle and Underwater VehicleDocument23 pagesStudy On Control System of Integrated Unmanned Surface Vehicle and Underwater VehicleDong HoangNo ratings yet
- ts01d Roberts Brown 4452Document12 pagests01d Roberts Brown 4452AnaNo ratings yet
- Head Losses and Flow Field at Trash Racks: Eirik Bruvik ØvregårdDocument54 pagesHead Losses and Flow Field at Trash Racks: Eirik Bruvik Øvregårdhabibi_fiestaNo ratings yet
- Remote SensingDocument26 pagesRemote SensingPIBRACNo ratings yet
- New Technologies in Marine Seismic Surveying: Overview and Physical Modelling ExperimentsDocument9 pagesNew Technologies in Marine Seismic Surveying: Overview and Physical Modelling ExperimentsAmnaTariqNo ratings yet
- Baseline Monitoring at A Pilot Site For Sediment ReuseDocument3 pagesBaseline Monitoring at A Pilot Site For Sediment ReuseBrunoNo ratings yet
- Elementary and Higher Surveying: (Laboratory)Document7 pagesElementary and Higher Surveying: (Laboratory)JohnDominicMoralesNo ratings yet
- Assessment of Subsea Pipelines: January 2014Document11 pagesAssessment of Subsea Pipelines: January 2014Sergi MotoNo ratings yet
- Sensors 16 01174Document27 pagesSensors 16 01174Sridhar MiriyalaNo ratings yet
- Cetn II 31 GrosskopfDocument12 pagesCetn II 31 GrosskopfblaNo ratings yet
- Performance Evaluation of The Velodyne VLP-16 System, Kidd - Et - Al - CHC2016 - Proceeding - PaperDocument10 pagesPerformance Evaluation of The Velodyne VLP-16 System, Kidd - Et - Al - CHC2016 - Proceeding - PaperAndrew PasqualeNo ratings yet
- Underwater Wireless CommunicationDocument9 pagesUnderwater Wireless CommunicationsayaleeNo ratings yet
- Global Navigation Satellite System Monitoring of the AtmosphereFrom EverandGlobal Navigation Satellite System Monitoring of the AtmosphereNo ratings yet
- Cosmetics ShopDocument7 pagesCosmetics ShopSanjay RajputNo ratings yet
- Plastiment® VZ: 产品数据表 (Product Data Sheet)Document3 pagesPlastiment® VZ: 产品数据表 (Product Data Sheet)Mochamad Ardie NoegrohoNo ratings yet
- BoilerDocument65 pagesBoilermangal SinghNo ratings yet
- Queues: CS 308 - Data StructuresDocument28 pagesQueues: CS 308 - Data Structuresagoyal5145No ratings yet
- Hazop: Designed by Hossam A. HassaneinDocument41 pagesHazop: Designed by Hossam A. HassaneinEkopribadiNo ratings yet
- Creating Thematic Maps in MapInfo - Geo InformationDocument9 pagesCreating Thematic Maps in MapInfo - Geo InformationMaxim GhereaNo ratings yet
- Super CapacityDocument2 pagesSuper CapacityNavneet RankNo ratings yet
- Infinera Auto-Lambda-0247-AN-RevA-0420Document6 pagesInfinera Auto-Lambda-0247-AN-RevA-0420robert adamsNo ratings yet
- Utility and Substation Testing AGDocument8 pagesUtility and Substation Testing AGgusNo ratings yet
- ReportDocument41 pagesReportSatyam BaderiyaNo ratings yet
- Identifying The Context: Your Sources in MLA Format in Your Bibliography at The End of The DocumentDocument11 pagesIdentifying The Context: Your Sources in MLA Format in Your Bibliography at The End of The DocumentFiza MahtaniNo ratings yet
- Travel PlanDocument2 pagesTravel PlanBar & BenchNo ratings yet
- HP Color Laserjet Pro M254 Printer HP Color Laserjet Pro M254 Printer Series SeriesDocument6 pagesHP Color Laserjet Pro M254 Printer HP Color Laserjet Pro M254 Printer Series Seriesit4728No ratings yet
- IoT-Based Smart Basket AbstractDocument3 pagesIoT-Based Smart Basket AbstractJay MedicharlaNo ratings yet
- ITAlarms and EventsDocument520 pagesITAlarms and Eventsmfonseca31No ratings yet
- Notebook Toshiba Satellite M30 - Compal - La-2462 - r0.1 - Schematics PDFDocument48 pagesNotebook Toshiba Satellite M30 - Compal - La-2462 - r0.1 - Schematics PDFRonny Kimer Fiestas VargasNo ratings yet
- We Plan... We Deliver... : Integrated Urban Development & Infrastructure ConsultantsDocument19 pagesWe Plan... We Deliver... : Integrated Urban Development & Infrastructure ConsultantsSenthilKumaranDNo ratings yet
- SS 15A03601 Operations ResearchDocument2 pagesSS 15A03601 Operations ResearchRaj KumarNo ratings yet
- Compactlogix 5370 Controllers, Revision 21: Release NotesDocument22 pagesCompactlogix 5370 Controllers, Revision 21: Release NotesMarcosNo ratings yet
- RT 200Document50 pagesRT 200Memo PáezNo ratings yet
- Business Certificate Timetable August 2023 Draft Edited 1 1pdf 1686898228811Document3 pagesBusiness Certificate Timetable August 2023 Draft Edited 1 1pdf 1686898228811Sada DahonestNo ratings yet
- Lia Aftanty - 21202241042 - Business PresentationDocument3 pagesLia Aftanty - 21202241042 - Business PresentationLia AftantyNo ratings yet