You might also like
- British Council - CLIL Lesson Plan TemplateDocument3 pagesBritish Council - CLIL Lesson Plan TemplateMaksym Buchek100% (4)
- Bio Data PDFDocument1 pageBio Data PDFjonathan86% (7)
- Teach Like A Champion 2Document8 pagesTeach Like A Champion 2api-474841765No ratings yet
- Beethoven's Tempest Sonata: Perspectives of Analysis and PerformanceDocument4 pagesBeethoven's Tempest Sonata: Perspectives of Analysis and PerformanceTan Chee ShengNo ratings yet
- NotesDocument100 pagesNotesLeah TalusigNo ratings yet
- Tema PFA Iulian ROCA - IPFP Promotia 2015-2017Document6 pagesTema PFA Iulian ROCA - IPFP Promotia 2015-2017Roca IulianNo ratings yet
- Angular Velocity - Rigid Body - Intuitive Approach: Sin - P - T - PDocument9 pagesAngular Velocity - Rigid Body - Intuitive Approach: Sin - P - T - PKeith wongNo ratings yet
- Ejercicio AnalogicosDocument4 pagesEjercicio AnalogicosMAIDY JULIETH SANCHEZ CUELLARNo ratings yet
- Zadatak: Formirati Globalnu Matricu Krutosti Prikazanog Okvira Vektor Nepoznatih PomjeranjaDocument4 pagesZadatak: Formirati Globalnu Matricu Krutosti Prikazanog Okvira Vektor Nepoznatih Pomjeranjaemina_hNo ratings yet
- Seismic Analysis: InputDocument3 pagesSeismic Analysis: InputSridhar MahalingamNo ratings yet
- 2538 Abb Appnotes Annex 1.2 A1 1hc0138865 en AaDocument2 pages2538 Abb Appnotes Annex 1.2 A1 1hc0138865 en Aadave chaudhuryNo ratings yet
- 2538 ABB AppNotes Annex 1.2 A1 1HC0138865 en AA Selection of UcDocument2 pages2538 ABB AppNotes Annex 1.2 A1 1HC0138865 en AA Selection of UcDeoudrafNo ratings yet
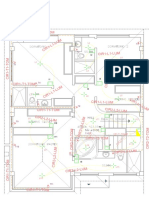
- PLANOS CasaDocument1 pagePLANOS Casaefrain chisag chisagNo ratings yet
- The Byzantine Generals Problem Leslie Lamport, Robert Shostak and Marshall PeaseDocument38 pagesThe Byzantine Generals Problem Leslie Lamport, Robert Shostak and Marshall PeaseSaptarshi Das100% (1)
- SLEwith SuhovDocument74 pagesSLEwith SuhovHuong Cam ThuyNo ratings yet
- GC 016 P - FrameDocument10 pagesGC 016 P - FrameRicardo BarrosNo ratings yet
- Area de Mecánica de Medios Continuos y Teoría de Estructuras. Dto Ingeniería Mecánica y ConstrucciónDocument5 pagesArea de Mecánica de Medios Continuos y Teoría de Estructuras. Dto Ingeniería Mecánica y ConstrucciónJorgeMariscalNo ratings yet
- Pictorial (Manual & Auto)Document1 pagePictorial (Manual & Auto)gt xNo ratings yet
- Mathcad VigaDocument4 pagesMathcad Vigawilther machacaNo ratings yet
- Stiffness Matrix GlobalDocument1 pageStiffness Matrix GlobalYamethaNo ratings yet
- Decode ManchesterDocument16 pagesDecode ManchesterNelson VazquezNo ratings yet
- Name: - Date: - Score: - Draw The Number of Wires Per Run of The Following Layout (With Markings) A B C D DDocument1 pageName: - Date: - Score: - Draw The Number of Wires Per Run of The Following Layout (With Markings) A B C D DFERDINAND BANAGANo ratings yet
- Training DWDM SlideDocument14 pagesTraining DWDM SlideAurélio Adolfo NhancaleNo ratings yet
- Schematic ATU 100 Mini V2.0 Autotuner by DFDocument1 pageSchematic ATU 100 Mini V2.0 Autotuner by DFDmitry Kuklin80% (5)
- P3T32 User Manual ExtractDocument9 pagesP3T32 User Manual ExtractCalum MartinNo ratings yet
- Thesis Report - Date: April 5th 2018 Forward and Inverse Kinematics of 3 Revolution-Joint Robotic ArmDocument7 pagesThesis Report - Date: April 5th 2018 Forward and Inverse Kinematics of 3 Revolution-Joint Robotic ArmVienNgocQuangNo ratings yet
- 7UT CT Connection-ModelDocument1 page7UT CT Connection-ModelOscarNo ratings yet
- PV1318#117Document50 pagesPV1318#117dan ballanNo ratings yet
- 7 RA4 6 MCLR 1 RB7/DAT 28 RB6/CLK 27 RB5 26 RB4 25 RB3 24: ATU-100 (Mini Board) by N7DDCDocument1 page7 RA4 6 MCLR 1 RB7/DAT 28 RB6/CLK 27 RB5 26 RB4 25 RB3 24: ATU-100 (Mini Board) by N7DDCMuhammet ŞekerNo ratings yet
- CIVL Pablo Hurtado AssignmentDocument4 pagesCIVL Pablo Hurtado AssignmentPablo Esteban Hurtado OjedaNo ratings yet
- Laplace Transform - Tutorial PDFDocument2 pagesLaplace Transform - Tutorial PDFShreyansh ShethNo ratings yet
- Leon - DIY Paper Model PDFDocument19 pagesLeon - DIY Paper Model PDFYazzmin DonajiNo ratings yet
- RZQG-L8 (7) Y1B - Installation ManualDocument24 pagesRZQG-L8 (7) Y1B - Installation ManualSorin DiaconuNo ratings yet
- Advanced Engineering Mathematics: Laplace TransformDocument20 pagesAdvanced Engineering Mathematics: Laplace TransformAndenet AshagrieNo ratings yet
- Classeur000 Cable BTDocument1 pageClasseur000 Cable BTkarim HaddadNo ratings yet
- General TimetableDocument1 pageGeneral TimetableKeo TaiNo ratings yet
- General Time TableDocument1 pageGeneral Time TableKeo TaiNo ratings yet
- Advanced Finite Element Beams Theory & CalculationsDocument20 pagesAdvanced Finite Element Beams Theory & CalculationsNathaji ShelkeNo ratings yet
- A 70 MHZ 270 MHZ Electrical Tunable LC Bandpass FilterDocument7 pagesA 70 MHZ 270 MHZ Electrical Tunable LC Bandpass FilterAmador Garcia IIINo ratings yet
- Condition A B S Minab L Maxab SL S L PQ A B C D SL Return SL PQ If Return SL PQ If Return OtherwiseDocument1 pageCondition A B S Minab L Maxab SL S L PQ A B C D SL Return SL PQ If Return SL PQ If Return OtherwiseGUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- LT MCC 512.2Document5 pagesLT MCC 512.2HEMANT RAMJINo ratings yet
- Materi PLCDocument38 pagesMateri PLCgoblockuNo ratings yet
- Reinforced Concrete Design (RCD - 1) Introduction and Theory III Lecture NotesDocument26 pagesReinforced Concrete Design (RCD - 1) Introduction and Theory III Lecture NotesColene GammadNo ratings yet
- Problem30 77Document1 pageProblem30 77IENCSNo ratings yet
- Liverpool Postcode MapDocument1 pageLiverpool Postcode MapCosmin LunguNo ratings yet
- Stress File PDFDocument9 pagesStress File PDFAnup WasekarNo ratings yet
- COSICO Exercise 6Document8 pagesCOSICO Exercise 6Gabriel LanceNo ratings yet
- Multilevel IS-IS NetworksDocument15 pagesMultilevel IS-IS NetworksAkhmed Abdul BabaNo ratings yet
- Qet - KELOMPOK 2Document2 pagesQet - KELOMPOK 2Eko Rizki RamadhaniNo ratings yet
- 23cmrxampl50db Schema en PrintDocument1 page23cmrxampl50db Schema en PrintfelipefreeNo ratings yet
- Fea MidsemDocument7 pagesFea MidsemRAMAN VERMANo ratings yet
- Fixed End MomentsDocument1 pageFixed End MomentsDaryll TuazonNo ratings yet
- Entropy of SteamDocument14 pagesEntropy of SteamItemogeng Bernatt BabeNo ratings yet
- Lec10 - CAE - Frame Element ExampleDocument28 pagesLec10 - CAE - Frame Element ExampleAndy PaulNo ratings yet
- Laplace TransformDocument1 pageLaplace TransformCristian GrajalesNo ratings yet
- Littelfuse Switch Diagrams 082616 PDFDocument2 pagesLittelfuse Switch Diagrams 082616 PDFmercy giftNo ratings yet
- Littelfuse Switch Diagrams 082616 PDFDocument2 pagesLittelfuse Switch Diagrams 082616 PDFahmedshirazarNo ratings yet
- 41-Ground Floor Lighting Layout PlanDocument1 page41-Ground Floor Lighting Layout PlanVictor PrinceNo ratings yet
- Input - PGZ MRC SaktiDocument6 pagesInput - PGZ MRC SaktiSakti KusumariniNo ratings yet
- 01a - StuboviDocument4 pages01a - Stubovinepoznati1111No ratings yet
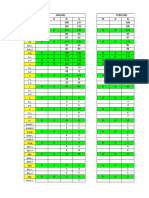
- No Responden Jenis Kelamin Kode Tingkat Pendidikan KodeDocument1 pageNo Responden Jenis Kelamin Kode Tingkat Pendidikan Kodezahra38No ratings yet
- Bezier Curves PDFDocument7 pagesBezier Curves PDFvaidehigoplakrishnanNo ratings yet
- Fall 2020-21, ECE2006-DSP Project Teamets and Title SeectionDocument4 pagesFall 2020-21, ECE2006-DSP Project Teamets and Title SeectionR Raj Ganesh 18BEC0937No ratings yet
- Tag Questions Exercises. ReDocument5 pagesTag Questions Exercises. ReJHONATAN JESUS LOPEZ SOLARTENo ratings yet
- Advanced Java and J2EE Question Bank 2021Document29 pagesAdvanced Java and J2EE Question Bank 2021Umme KulsumNo ratings yet
- The Amazing VFP2C32 LibraryDocument28 pagesThe Amazing VFP2C32 Libraryluis eduardo ostos febresNo ratings yet
- Hamza AmjadfmjDocument5 pagesHamza AmjadfmjHamza AmjadNo ratings yet
- 6th Class Annual Planner 2022-23.-1Document28 pages6th Class Annual Planner 2022-23.-1LT FunNo ratings yet
- 48417CCJDocument24 pages48417CCJCarmeloPappalardoNo ratings yet
- Latin-English Vocabulary (Large Print) For Ritchie's Fabulae FacilesDocument36 pagesLatin-English Vocabulary (Large Print) For Ritchie's Fabulae FacilesXenophonEphesius100% (6)
- Oracle Business Intelligence Enterprise Edition (OBIEE) 11g InstallationDocument10 pagesOracle Business Intelligence Enterprise Edition (OBIEE) 11g InstallationPankaj SinghNo ratings yet
- JDI-Manual CN 1.3 ProgrammerDocument46 pagesJDI-Manual CN 1.3 ProgrammeroyoveraNo ratings yet
- N Orbitals Booklet WEB EnglishDocument7 pagesN Orbitals Booklet WEB EnglishernishtwoNo ratings yet
- Senior Year CV Resume May 2022Document4 pagesSenior Year CV Resume May 2022api-611507087No ratings yet
- Language and Its FunctionsDocument28 pagesLanguage and Its FunctionsDiaz Velarde TrishaNo ratings yet
- TMP 12 F6Document14 pagesTMP 12 F6FrontiersNo ratings yet
- Used To Board Game PDFDocument2 pagesUsed To Board Game PDFever armando vargas adames50% (2)
- ENGLISH Subject CHSL2021 42 Shifts RBE CompressedDocument155 pagesENGLISH Subject CHSL2021 42 Shifts RBE CompressedpriyasNo ratings yet
- Literary AnalysisDocument2 pagesLiterary AnalysisRich Miguel100% (1)
- Excel IF Function and IF StatementsDocument7 pagesExcel IF Function and IF StatementsLITTLE HEARTS JOHNNo ratings yet
- T2 Temple Tech A BookDocument645 pagesT2 Temple Tech A Bookshanmuk .p100% (2)
- Bautista MonographDocument12 pagesBautista MonographPatrick LyssyNo ratings yet
- Mobile DeveloperDocument6 pagesMobile DeveloperRahul ChintaNo ratings yet
- My Last Duchess BookletDocument24 pagesMy Last Duchess BookletJack LinsteadNo ratings yet
- Khalid Bin Waleed Raziyallahu AnhuDocument4 pagesKhalid Bin Waleed Raziyallahu AnhumusarhadNo ratings yet
- Exercise 1.4 DiscreteDocument18 pagesExercise 1.4 DiscreteMaira amanNo ratings yet
- Good Programming SkillsDocument47 pagesGood Programming SkillsPrashant BajpaiNo ratings yet
- The 6 Spiritual Castles and Their Present Keepers Public6Document5 pagesThe 6 Spiritual Castles and Their Present Keepers Public6Zahid GolandazNo ratings yet
- Assignment - 3 StatementDocument3 pagesAssignment - 3 Statementevery thingNo ratings yet