You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Brake System: 1988 Jeep CherokeeDocument22 pagesBrake System: 1988 Jeep CherokeePreet_Raj_2303No ratings yet
- ChassisElectrical PDFDocument111 pagesChassisElectrical PDFDhany SiregarNo ratings yet
- Bendix Double Check Valves: Delivery SupplyDocument4 pagesBendix Double Check Valves: Delivery SupplyTim WorkmanNo ratings yet
- tp99124 PDFDocument20 pagestp99124 PDFDieselkNo ratings yet
- SpeedometerDocument2 pagesSpeedometerSrikanth ReddyNo ratings yet
- 10.2. ABS Bendix Air (Cont.), P. 2: Electrical Circuit Diagram ManualDocument393 pages10.2. ABS Bendix Air (Cont.), P. 2: Electrical Circuit Diagram ManualMax Ander Rojas FernandezNo ratings yet
- Air Brake Manual: Nova Scotia On The MoveDocument82 pagesAir Brake Manual: Nova Scotia On The MovesambasivammeNo ratings yet
- Maxxforce DT, 9 and 10 Turbocharger Repair: Study Guide Tmt-121003Document26 pagesMaxxforce DT, 9 and 10 Turbocharger Repair: Study Guide Tmt-121003Sicein Sas100% (1)
- Alliance Clutch CatalogDocument4 pagesAlliance Clutch CatalogGustavo MosqueraNo ratings yet
- Air Brake SystemDocument22 pagesAir Brake Systemrohitpansara008No ratings yet
- HINO LT-0013 Quick Reference Counter CardDocument2 pagesHINO LT-0013 Quick Reference Counter CardAlvin Siew WaiNo ratings yet
- Unit - V Engine Management System (EMS)Document65 pagesUnit - V Engine Management System (EMS)Chidananda BasavannaNo ratings yet
- BW2499 Operators Manual RSP FinalDocument12 pagesBW2499 Operators Manual RSP Finalfelix3189No ratings yet
- New Operator PanelsDocument6 pagesNew Operator PanelstribulacaoNo ratings yet
- Ficha Tecnica Ak8jrsa-Njl - HinoDocument5 pagesFicha Tecnica Ak8jrsa-Njl - HinoGary CarrascoNo ratings yet
- Coach Bat. Diconnect Solenoid How It Works 5322019100Document9 pagesCoach Bat. Diconnect Solenoid How It Works 5322019100Clifton Jamison100% (1)
- Governor (Types I, II, IV, and V) - CheckDocument5 pagesGovernor (Types I, II, IV, and V) - CheckDaniel TekleNo ratings yet
- Advanced Digital Speedometer For Vehicles and Machinaries (Used As Odometer Too)Document27 pagesAdvanced Digital Speedometer For Vehicles and Machinaries (Used As Odometer Too)Shanky Kumar100% (2)
- Yamaha MC-X CartridgesDocument1 pageYamaha MC-X CartridgesOedip PiafNo ratings yet
- 00 017695Document4 pages00 017695Walter LazoNo ratings yet
- Section 5 - Maintenance Schedule and Service ProceduresDocument42 pagesSection 5 - Maintenance Schedule and Service ProceduresHipolito Caraballo100% (1)
- mm37 PDFDocument32 pagesmm37 PDFSaša OljačaNo ratings yet
- 31 Series Trouble ShootingDocument4 pages31 Series Trouble ShootingrburtonshawNo ratings yet
- PCB Diagram: 9-1 PDP Module, SMPSDocument2 pagesPCB Diagram: 9-1 PDP Module, SMPSFidel ArroyoNo ratings yet
- Test PDFDocument481 pagesTest PDFHung Hua NhuNo ratings yet
- SB 214062Document2 pagesSB 214062api-19785517No ratings yet
- ETI Euro4-5 Installation InstructionsDocument16 pagesETI Euro4-5 Installation InstructionsDuy KhaNo ratings yet
- 1 Mbe4000 06aDocument38 pages1 Mbe4000 06azahar222No ratings yet
- Volume 2, Pneumatics ServaDocument63 pagesVolume 2, Pneumatics ServaOscar MartinezNo ratings yet
- 8C100 09 PDFDocument23 pages8C100 09 PDFChristian BedoyaNo ratings yet
- FM 300Document5 pagesFM 300Happy DealNo ratings yet
- SU Idiot GuideDocument7 pagesSU Idiot GuideHimanshu SinghNo ratings yet
- Retaining Engine Brake PistonsDocument1 pageRetaining Engine Brake PistonsHamilton MirandaNo ratings yet
- CAN HandoutDocument16 pagesCAN HandoutJaffer HussainNo ratings yet
- Como Remover Un Iyector MackDocument6 pagesComo Remover Un Iyector MackHamilton MirandaNo ratings yet
- 2GCS303012A0031-Capacitor Banks - Quick Selection Guide ABBDocument3 pages2GCS303012A0031-Capacitor Banks - Quick Selection Guide ABBSubhash KashyapNo ratings yet
- NV10Document39 pagesNV10Marian BaciuNo ratings yet
- Air Over BrakeDocument50 pagesAir Over Brakesidik purnomo100% (1)
- 3 Phase Extra PDFDocument9 pages3 Phase Extra PDFUnknownNo ratings yet
- FIP INLINE - Daffa Ramadhana P.SDocument17 pagesFIP INLINE - Daffa Ramadhana P.SUciha sasukeNo ratings yet
- Wiring DiagramDocument93 pagesWiring DiagramAggrey-Anthony DuncanNo ratings yet
- Sanden LTD - Automobile Air-Conditioning - Mechanical Engg. (ME) Summer Training Project ReportDocument29 pagesSanden LTD - Automobile Air-Conditioning - Mechanical Engg. (ME) Summer Training Project ReportRITESH ROHILLANo ratings yet
- Generator TheoryDocument4 pagesGenerator TheoryRachit KhannaNo ratings yet
- MD 3060 MD 3560Document2 pagesMD 3060 MD 3560Nelson Zubieta0% (1)
- 2014 Truck Products Catalogue (Usa)Document28 pages2014 Truck Products Catalogue (Usa)Adolfo CisnerosNo ratings yet
- Product Introduction Product Introduction: LEXUS LS600h/LS600hL Hybrid System Power Control Unit (PCU)Document4 pagesProduct Introduction Product Introduction: LEXUS LS600h/LS600hL Hybrid System Power Control Unit (PCU)Вячеслав ГлушакNo ratings yet
- Crankshaft Position (CKP) Sensor: 1F2-12 M161 Engine ControlsDocument6 pagesCrankshaft Position (CKP) Sensor: 1F2-12 M161 Engine ControlsKukuh SeptiantoNo ratings yet
- CSP Service Alert 10-16 ISX Injector Sleeve Oring Material ImprovementsDocument2 pagesCSP Service Alert 10-16 ISX Injector Sleeve Oring Material ImprovementsAlexis SanchezNo ratings yet
- Laboratory Session 8 Squirrel Cage Induction Motor CharacteristicsDocument15 pagesLaboratory Session 8 Squirrel Cage Induction Motor CharacteristicshinsermuNo ratings yet
- Modeling and Simulation of Frequency Converter Used in Speed Control of Asynchronous MotorDocument6 pagesModeling and Simulation of Frequency Converter Used in Speed Control of Asynchronous MotorLelosPinelos123No ratings yet
- Short Circuit Current Forces PDFDocument4 pagesShort Circuit Current Forces PDFDaniel MemijeNo ratings yet
- Direct Torque ControlDocument5 pagesDirect Torque ControljanusanusNo ratings yet
- Lab Manual: ACADEMIC YEAR 2015-16Document48 pagesLab Manual: ACADEMIC YEAR 2015-16ramjiNo ratings yet
- Motor DrivesDocument61 pagesMotor DrivesSatesh NairNo ratings yet
- Guide: Mr. M. Srinivasa Rao Asso. ProffesorDocument49 pagesGuide: Mr. M. Srinivasa Rao Asso. ProffesorSaurabh MishraNo ratings yet
- Control System Lab ManualDocument63 pagesControl System Lab ManualkrishnandrkNo ratings yet
- CHAPTER 8 - Synchronous Machine Transient AnalysisDocument64 pagesCHAPTER 8 - Synchronous Machine Transient AnalysisMohd A IshakNo ratings yet
- Vector Control Technique For Induction Motor PDFDocument6 pagesVector Control Technique For Induction Motor PDFThinseepNo ratings yet
- #Masterdrives CUVC Eng Uusi DC-DCDocument35 pages#Masterdrives CUVC Eng Uusi DC-DCHồng ĐạtNo ratings yet
- H13 611 PDFDocument14 pagesH13 611 PDFMonchai PhaichitchanNo ratings yet
- CSE 202.04 Inspection of Concrete StructuresDocument67 pagesCSE 202.04 Inspection of Concrete StructuresJellyn BaseNo ratings yet
- Case Study Single Sign On Solution Implementation Software Luxoft For Ping IdentityDocument5 pagesCase Study Single Sign On Solution Implementation Software Luxoft For Ping IdentityluxoftNo ratings yet
- 24 DPC-422 Maintenance ManualDocument26 pages24 DPC-422 Maintenance ManualalternativblueNo ratings yet
- SreenuDocument2 pagesSreenuSubbareddy NvNo ratings yet
- Kapinga Kamwalye Conservancy ReleaseDocument5 pagesKapinga Kamwalye Conservancy ReleaseRob ParkerNo ratings yet
- BS 7974 2019Document68 pagesBS 7974 2019bcyt00No ratings yet
- Faa Data On B 777 PDFDocument104 pagesFaa Data On B 777 PDFGurudutt PaiNo ratings yet
- Bad Memories Walkthrough 0.52Document10 pagesBad Memories Walkthrough 0.52Micael AkumaNo ratings yet
- Bank Danamon Organization ChartDocument4 pagesBank Danamon Organization ChartFaisal Agus NugrahaNo ratings yet
- FinalDocument18 pagesFinalAkash LadNo ratings yet
- Practical Modern SCADA Protocols. DNP3, 60870.5 and Related SystemsDocument4 pagesPractical Modern SCADA Protocols. DNP3, 60870.5 and Related Systemsalejogomez200No ratings yet
- DION IMPACT 9102 SeriesDocument5 pagesDION IMPACT 9102 SeriesLENEEVERSONNo ratings yet
- CS-6777 Liu AbsDocument103 pagesCS-6777 Liu AbsILLA PAVAN KUMAR (PA2013003013042)No ratings yet
- List of Iconic CPG Projects in SingaporeDocument2 pagesList of Iconic CPG Projects in SingaporeKS LeeNo ratings yet
- Ducted Split ACsDocument31 pagesDucted Split ACsHammadZaman100% (1)
- Derebe TekesteDocument75 pagesDerebe TekesteAbinet AdemaNo ratings yet
- TFGDocument46 pagesTFGAlex Gigena50% (2)
- Ci Thai RiceDocument4 pagesCi Thai RiceMakkah Madina riceNo ratings yet
- DFo 2 1Document15 pagesDFo 2 1Donna HernandezNo ratings yet
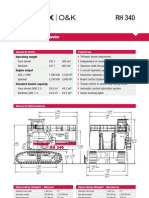
- Hydraulic Mining ExcavatorDocument8 pagesHydraulic Mining Excavatorasditia_07100% (1)
- Artificial Intelligence Techniques For Encrypt Images Based On The Chaotic System Implemented On Field-Programmable Gate ArrayDocument10 pagesArtificial Intelligence Techniques For Encrypt Images Based On The Chaotic System Implemented On Field-Programmable Gate ArrayIAES IJAINo ratings yet
- Intelligent DesignDocument21 pagesIntelligent DesignDan W ReynoldsNo ratings yet
- Aditya Birla GroupDocument21 pagesAditya Birla GroupNarendra ThummarNo ratings yet
- Bba VDocument2 pagesBba VkunalbrabbitNo ratings yet
- AssignmentDocument47 pagesAssignmentHarrison sajorNo ratings yet
- Dreaded Attack - Voyages Community Map Rules v1Document2 pagesDreaded Attack - Voyages Community Map Rules v1jNo ratings yet
- Notes On Antibodies PropertiesDocument3 pagesNotes On Antibodies PropertiesBidur Acharya100% (1)
- Understanding and Teaching Fractions: Sybilla BeckmannDocument26 pagesUnderstanding and Teaching Fractions: Sybilla Beckmannjhicks_mathNo ratings yet
- Practising Modern English For Life Sciences Students Caiet Exercitii-1Document77 pagesPractising Modern English For Life Sciences Students Caiet Exercitii-1Robert BobiaNo ratings yet
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceFrom EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceNo ratings yet
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...From EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...No ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tFrom EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tRating: 4.5 out of 5 stars4.5/5 (27)
- A Mind at Play: How Claude Shannon Invented the Information AgeFrom EverandA Mind at Play: How Claude Shannon Invented the Information AgeRating: 4 out of 5 stars4/5 (53)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 4.5 out of 5 stars4.5/5 (10)
- Power System Control and ProtectionFrom EverandPower System Control and ProtectionB. Don RussellRating: 4 out of 5 stars4/5 (11)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Guide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)From EverandGuide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Rating: 4 out of 5 stars4/5 (2)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonFrom EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonRating: 5 out of 5 stars5/5 (2)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- Digital Transformation: Survive and Thrive in an Era of Mass ExtinctionFrom EverandDigital Transformation: Survive and Thrive in an Era of Mass ExtinctionRating: 4.5 out of 5 stars4.5/5 (9)
- Schaum's Outline of Basic Electricity, Second EditionFrom EverandSchaum's Outline of Basic Electricity, Second EditionRating: 5 out of 5 stars5/5 (14)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsFrom EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)
- Build Your Own Electronics WorkshopFrom EverandBuild Your Own Electronics WorkshopRating: 3.5 out of 5 stars3.5/5 (3)
- DIY Drones for the Evil Genius: Design, Build, and Customize Your Own DronesFrom EverandDIY Drones for the Evil Genius: Design, Build, and Customize Your Own DronesRating: 3.5 out of 5 stars3.5/5 (3)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignFrom EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNo ratings yet
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldFrom EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldRating: 4 out of 5 stars4/5 (87)