You might also like
- Optimal Overcurrent Relay Coordination Using Artificial Bees Colony AlgorithmDocument4 pagesOptimal Overcurrent Relay Coordination Using Artificial Bees Colony AlgorithmZellagui EnergyNo ratings yet
- Literature Review On Relay Coordination Using Software TechniquesDocument4 pagesLiterature Review On Relay Coordination Using Software TechniquesMohitNo ratings yet
- Optimal Coordination of Directional Overcurrent Relays: A Genetic Algorithm ApproachDocument4 pagesOptimal Coordination of Directional Overcurrent Relays: A Genetic Algorithm ApproachdnnegNo ratings yet
- Settingless ProtectionDocument15 pagesSettingless ProtectionAshish KumarNo ratings yet
- End To End TestingDocument6 pagesEnd To End TestingEduardo777_777No ratings yet
- Coordination of Overcurrent Relays Protection Systems For Wind Power PlantsDocument6 pagesCoordination of Overcurrent Relays Protection Systems For Wind Power PlantsSharad PatelNo ratings yet
- DELCON PaperDocument7 pagesDELCON PaperNandi ?No ratings yet
- Relay Coordination 1 PDFDocument5 pagesRelay Coordination 1 PDFNikhil SainiNo ratings yet
- Trafo 3 AsdDocument4 pagesTrafo 3 AsdAchyar Maulana PratamaNo ratings yet
- Intelligent Method For Protection Coordination: AbstractDocument5 pagesIntelligent Method For Protection Coordination: Abstractapi-3697505No ratings yet
- Busbar Protection - A ReviewDocument5 pagesBusbar Protection - A ReviewPrajiWazharyNo ratings yet
- Over MatlabDocument8 pagesOver MatlabPriyesh GuptaNo ratings yet
- Frequency RelayDocument9 pagesFrequency RelayLanya AramNo ratings yet
- ZERO CrossingDocument6 pagesZERO CrossingjoseNo ratings yet
- TM7 5-811.14Document24 pagesTM7 5-811.14Yomara Samantha Hernandez LaureanoNo ratings yet
- Evaluation PDFDocument5 pagesEvaluation PDFpursiiiNo ratings yet
- Time Coordination Method For Power System Protection by Evolutionary AlgorithmDocument6 pagesTime Coordination Method For Power System Protection by Evolutionary AlgorithmrockNo ratings yet
- (2016) Rodrigo - Power Transformer Differential Protection Using The Boundary Discrete Wavelet TransformDocument13 pages(2016) Rodrigo - Power Transformer Differential Protection Using The Boundary Discrete Wavelet Transformwaael abdulhassanNo ratings yet
- Ramu IntroductionDocument5 pagesRamu IntroductionRamuNo ratings yet
- Daptive Relaying: New Direction in Power System ProtectionDocument6 pagesDaptive Relaying: New Direction in Power System ProtectionYigit SarıkayaNo ratings yet
- Transmission Line Faults and Methods of Analysis: Dept. of Electrical Engg., MGI-COET, ShegaonDocument28 pagesTransmission Line Faults and Methods of Analysis: Dept. of Electrical Engg., MGI-COET, ShegaonAvinash ChimkarNo ratings yet
- 6605 PracticalApproach KZ-DC 20130328 WebDocument12 pages6605 PracticalApproach KZ-DC 20130328 WebSaritha Reddy KalamallaNo ratings yet
- The Power Transformer Differential Protection Using Decision TreeDocument13 pagesThe Power Transformer Differential Protection Using Decision Treehack fjNo ratings yet
- Overcurrent Relays Coordination Using MATLAB Model: A. Akhikpemelo, M. J. E. Evbogbai and M. S. OkundamiyaDocument8 pagesOvercurrent Relays Coordination Using MATLAB Model: A. Akhikpemelo, M. J. E. Evbogbai and M. S. Okundamiyarobertovm2002No ratings yet
- Sookrod 2018Document5 pagesSookrod 2018Anikendu MaitraNo ratings yet
- Relay Coordination Chapter3Document13 pagesRelay Coordination Chapter3Chân Gà NướngNo ratings yet
- Coordination of Overcurrent Relays in Distribution System Using Linear Programming TechniqueDocument4 pagesCoordination of Overcurrent Relays in Distribution System Using Linear Programming TechniqueGabriela Chacana Carrasco100% (1)
- IJEEE - Protection Scheme For Renewable Energy Sources Based Smart Grid Using Stockwell Transform and Rule Based Decision TreeDocument18 pagesIJEEE - Protection Scheme For Renewable Energy Sources Based Smart Grid Using Stockwell Transform and Rule Based Decision Treeiaset123No ratings yet
- 1 s2.0 S014206150700097X Main - 2Document7 pages1 s2.0 S014206150700097X Main - 2Arash AbbasiNo ratings yet
- Power System RelayingDocument22 pagesPower System RelayingKhairul AshrafNo ratings yet
- Improved Power Transformer Protection Using Numerical RelaysDocument17 pagesImproved Power Transformer Protection Using Numerical RelayssegamegaNo ratings yet
- Automatic Relay SettingDocument37 pagesAutomatic Relay SettingpaulnidNo ratings yet
- Co-Ordination of Overcurrent Relay For Chemical Industrial Plant Using ETAPDocument5 pagesCo-Ordination of Overcurrent Relay For Chemical Industrial Plant Using ETAPHimdad Tahir0% (1)
- Line Current Differential Testing-A Practical ApproachDocument10 pagesLine Current Differential Testing-A Practical ApproachmentongNo ratings yet
- Chapter One: Introduction 1.1 Background of The StudyDocument30 pagesChapter One: Introduction 1.1 Background of The StudyUzoma FrancisNo ratings yet
- Electrical Power and Energy Systems: Tomislav Rajic, Zoran StojanovicDocument11 pagesElectrical Power and Energy Systems: Tomislav Rajic, Zoran StojanovicZahaira OblitasNo ratings yet
- Hybrid GADocument7 pagesHybrid GAZellagui EnergyNo ratings yet
- Protection Relay SettingsDocument3 pagesProtection Relay SettingssmsbondNo ratings yet
- Adaptive Non-Communication Protection For Power Lines BO Scheme 1-The Delayed Operation ApproachDocument7 pagesAdaptive Non-Communication Protection For Power Lines BO Scheme 1-The Delayed Operation ApproachChristos ApostolopoulosNo ratings yet
- Adaptive Differential Protection For Power Transformer Based On Transient Signal AnalysisDocument7 pagesAdaptive Differential Protection For Power Transformer Based On Transient Signal Analysisahmedsalama2007No ratings yet
- Fuzzy Logic Approach For Fault Diagnosis of Three Phase Transmission LineDocument5 pagesFuzzy Logic Approach For Fault Diagnosis of Three Phase Transmission LineJournal 4 ResearchNo ratings yet
- Overcurrent Coordination StudyDocument25 pagesOvercurrent Coordination StudyMohamed TalebNo ratings yet
- ! Over Current Coordination StudyDocument25 pages! Over Current Coordination Studybacuoc.nguyen356100% (1)
- Literature Review On Relay Coordination Using Software TechniquesDocument4 pagesLiterature Review On Relay Coordination Using Software Techniquesrobertovm2002No ratings yet
- Distribution OverDocument3 pagesDistribution OverPaolo CasungcadNo ratings yet
- Ijertv13n11 99Document7 pagesIjertv13n11 99Nandi ?No ratings yet
- Design of A Digital Protection Scheme For Power Transformers Using Optimal State ObserversDocument7 pagesDesign of A Digital Protection Scheme For Power Transformers Using Optimal State Observersjose_sa_3No ratings yet
- K Bhavya Psca PlagDocument57 pagesK Bhavya Psca PlagnareshNo ratings yet
- Prediction of Critical Clearing Time Using Artificial Neural NetworkDocument5 pagesPrediction of Critical Clearing Time Using Artificial Neural NetworkSaddam HussainNo ratings yet
- A Hybrid Optimization Algorithm (IA-PSO) For Optimal Coordination of Directional Overcurrent Relays in Meshed Power SystemsDocument11 pagesA Hybrid Optimization Algorithm (IA-PSO) For Optimal Coordination of Directional Overcurrent Relays in Meshed Power SystemsZellagui EnergyNo ratings yet
- New Data-Driven Approach To Bridging Power System Protection Gaps With Deep LearningDocument9 pagesNew Data-Driven Approach To Bridging Power System Protection Gaps With Deep LearningEren BaharözüNo ratings yet
- Numerical RelaysDocument7 pagesNumerical RelaysK Vijay Bhaskar ReddyNo ratings yet
- Automatic Relay CoordinationDocument4 pagesAutomatic Relay CoordinationSoumikDasNo ratings yet
- Algorithm For Digital Low ImpedanceDocument8 pagesAlgorithm For Digital Low ImpedanceJanen AhujaNo ratings yet
- Zeina L Zadeh 2019Document4 pagesZeina L Zadeh 2019Gustavo FloresNo ratings yet
- 3898-Article Text-10434-1-10-20180426Document8 pages3898-Article Text-10434-1-10-20180426robier raoufNo ratings yet
- Overcurrent Relay Advances for Modern Electricity NetworksFrom EverandOvercurrent Relay Advances for Modern Electricity NetworksNo ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Deep Hole Drilling Tools: BotekDocument32 pagesDeep Hole Drilling Tools: BotekDANIEL MANRIQUEZ FAVILANo ratings yet
- Z-Purlins: Technical DocumentationDocument11 pagesZ-Purlins: Technical Documentationardit bedhiaNo ratings yet
- Eggermont 2019 ABRDocument15 pagesEggermont 2019 ABRSujeet PathakNo ratings yet
- Lecture 2 Effects of Operating Conditions in VCCDocument9 pagesLecture 2 Effects of Operating Conditions in VCCDeniell Joyce MarquezNo ratings yet
- Rifle May 2015 USADocument72 pagesRifle May 2015 USAhanshcNo ratings yet
- Tool Charts PDFDocument3 pagesTool Charts PDFtebengz100% (2)
- Chapter 23Document9 pagesChapter 23Javier Chuchullo TitoNo ratings yet
- ყვავილები ელჯერნონისთვისDocument348 pagesყვავილები ელჯერნონისთვისNia NorakidzeNo ratings yet
- Teaching Profession - Educational PhilosophyDocument23 pagesTeaching Profession - Educational PhilosophyRon louise PereyraNo ratings yet
- Chapter 4 Achieving Clarity and Limiting Paragraph LengthDocument1 pageChapter 4 Achieving Clarity and Limiting Paragraph Lengthapi-550339812No ratings yet
- Catedral de SevillaDocument28 pagesCatedral de SevillaAnonymous LkgNmKeNo ratings yet
- PC Model Answer Paper Winter 2016Document27 pagesPC Model Answer Paper Winter 2016Deepak VermaNo ratings yet
- Case Study 2Document5 pagesCase Study 2api-247285537100% (1)
- The RBG Blueprint For Black Power Study Cell GuidebookDocument8 pagesThe RBG Blueprint For Black Power Study Cell GuidebookAra SparkmanNo ratings yet
- PresentationDocument27 pagesPresentationMenuka WatankachhiNo ratings yet
- Tutorial 5 SolvedDocument3 pagesTutorial 5 SolvedAshutoshKumarNo ratings yet
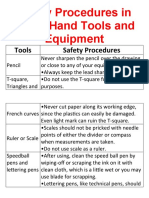
- Safety Procedures in Using Hand Tools and EquipmentDocument12 pagesSafety Procedures in Using Hand Tools and EquipmentJan IcejimenezNo ratings yet
- In Flight Fuel Management and Declaring MINIMUM MAYDAY FUEL-1.0Document21 pagesIn Flight Fuel Management and Declaring MINIMUM MAYDAY FUEL-1.0dahiya1988No ratings yet
- Prevention of Waterborne DiseasesDocument2 pagesPrevention of Waterborne DiseasesRixin JamtshoNo ratings yet
- LP For EarthquakeDocument6 pagesLP For Earthquakejelena jorgeoNo ratings yet
- ISO 27001 Introduction Course (05 IT01)Document56 pagesISO 27001 Introduction Course (05 IT01)Sheik MohaideenNo ratings yet
- Quiz 140322224412 Phpapp02Document26 pagesQuiz 140322224412 Phpapp02Muhammad Mubeen Iqbal PuriNo ratings yet
- Assistant Cook Learner Manual EnglishDocument152 pagesAssistant Cook Learner Manual EnglishSang Putu Arsana67% (3)
- FIRST SUMMATIVE EXAMINATION IN ORAL COMMUNICATION IN CONTEXT EditedDocument3 pagesFIRST SUMMATIVE EXAMINATION IN ORAL COMMUNICATION IN CONTEXT EditedRodylie C. CalimlimNo ratings yet
- Delonghi Esam Series Service Info ItalyDocument10 pagesDelonghi Esam Series Service Info ItalyBrko BrkoskiNo ratings yet
- World Insurance Report 2017Document36 pagesWorld Insurance Report 2017deolah06No ratings yet
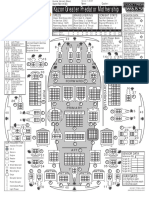
- Kazon Greater Predator MothershipDocument1 pageKazon Greater Predator MothershipknavealphaNo ratings yet
- Gas Dynamics and Jet Propulsion 2marksDocument15 pagesGas Dynamics and Jet Propulsion 2marksAbdul rahumanNo ratings yet
- How He Loves PDFDocument2 pagesHow He Loves PDFJacob BullockNo ratings yet
- Sociology As A Form of Consciousness - 20231206 - 013840 - 0000Document4 pagesSociology As A Form of Consciousness - 20231206 - 013840 - 0000Gargi sharmaNo ratings yet