You might also like
- Aci 350.3-06 PDFDocument67 pagesAci 350.3-06 PDFManuel Restrepo100% (1)
- Introduction to Quantum Computing & Machine Learning Technologies: 1, #1From EverandIntroduction to Quantum Computing & Machine Learning Technologies: 1, #1No ratings yet
- Wind Loading On Solar Panels at Different Inclination AnglesDocument9 pagesWind Loading On Solar Panels at Different Inclination AnglesPauloAndresSepulvedaNo ratings yet
- FrictionDocument13 pagesFrictionmjchavda8046100% (3)
- Amity School of Engineering: Report Heading: Quantum ComputingDocument38 pagesAmity School of Engineering: Report Heading: Quantum ComputinghimanshuNo ratings yet
- Quantum - Computing (Aditya Raj)Document24 pagesQuantum - Computing (Aditya Raj)Aditya RajNo ratings yet
- BS en Iso 5577-2017Document42 pagesBS en Iso 5577-2017Vasko MandilNo ratings yet
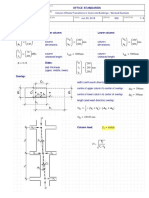
- Column Offset DesignDocument6 pagesColumn Offset DesignSagar Sakore100% (1)
- Deflection of BeamDocument13 pagesDeflection of BeamAquw ArishaNo ratings yet
- Dynamics of Structures 4th Edition Chopra Solutions ManualDocument21 pagesDynamics of Structures 4th Edition Chopra Solutions Manualkarenyoungsbpmkaxioz94% (17)
- Hydrodynamics of Packed ColomnDocument6 pagesHydrodynamics of Packed ColomnDhananjay KadamNo ratings yet
- Underwater Explosins by ColeDocument464 pagesUnderwater Explosins by Colexiaotaoscribd100% (1)
- E3sconf Iconnect2023 04041Document9 pagesE3sconf Iconnect2023 04041マルワNo ratings yet
- p3 - Electronics 10 02433 v2Document17 pagesp3 - Electronics 10 02433 v2Aritra SarkarNo ratings yet
- p4 - Applsci 11 02696 v2Document25 pagesp4 - Applsci 11 02696 v2Aritra SarkarNo ratings yet
- Theoretical Computer Science: Catherine C. McgeochDocument15 pagesTheoretical Computer Science: Catherine C. McgeochDANTENo ratings yet
- Article-2015-PyEMMA 2-A Software Package For Estimation, Validation, Andanalysis of Markov ModelsDocument18 pagesArticle-2015-PyEMMA 2-A Software Package For Estimation, Validation, Andanalysis of Markov Modelscarlos ArozamenaNo ratings yet
- A Variational Quantum Linear Solver Application To Discrete Finite-Element MethodsDocument23 pagesA Variational Quantum Linear Solver Application To Discrete Finite-Element Methodsrajat365No ratings yet
- IIT-H Interdisciplinary PHDDocument39 pagesIIT-H Interdisciplinary PHDmetaschimatismoúsNo ratings yet
- Quantum Computing For Fusion Energy Science ApplicationsDocument40 pagesQuantum Computing For Fusion Energy Science ApplicationsvvvvvNo ratings yet
- Quantum Machine Learning of Eco-Environmental SurfacesDocument3 pagesQuantum Machine Learning of Eco-Environmental SurfacesfariNo ratings yet
- QML ReviewDocument20 pagesQML Reviewmevlana3992No ratings yet
- Report NagaokaDocument5 pagesReport NagaokaFevi AbejeNo ratings yet
- BTPtopics 2019Document6 pagesBTPtopics 2019Aaryan GuptaNo ratings yet
- Accelerating Quantum Monte Carlo Simulations of Real Materials On GPU ClustersDocument12 pagesAccelerating Quantum Monte Carlo Simulations of Real Materials On GPU ClustersAdip ChyNo ratings yet
- Submitted To: Submitted By: Dr. Sanjay Bhargav Shweta Rathi Roll No. 35Document20 pagesSubmitted To: Submitted By: Dr. Sanjay Bhargav Shweta Rathi Roll No. 35Ankita BasuNo ratings yet
- Bedrunka2021 Chapter LettucePyTorch-BasedLatticeBolDocument16 pagesBedrunka2021 Chapter LettucePyTorch-BasedLatticeBolzhaojie qinNo ratings yet
- Is Quantum Search Practical?Document8 pagesIs Quantum Search Practical?investorNo ratings yet
- Quantum APPLICATIONDocument3 pagesQuantum APPLICATIONNoor SaberNo ratings yet
- Erik Schnetter Et Al - Astrophysical Applications of Numerical Relativity - From Teragrid To PetascaleDocument8 pagesErik Schnetter Et Al - Astrophysical Applications of Numerical Relativity - From Teragrid To PetascaleHimaszNo ratings yet
- Matrix-Model Simulations Using Quantum Computing, Deep Learning, and Lattice Monte CarloDocument44 pagesMatrix-Model Simulations Using Quantum Computing, Deep Learning, and Lattice Monte CarloEduardus Henricus HauwertNo ratings yet
- Machine Learning Project Writing Help For Students: KeywordsDocument6 pagesMachine Learning Project Writing Help For Students: KeywordsAlexandre CabrelNo ratings yet
- Quantum Algorithm Design Techniques and ApplicationsDocument79 pagesQuantum Algorithm Design Techniques and ApplicationsAddy EmmanuelNo ratings yet
- Wang QuantumComputationQuantum 2012Document23 pagesWang QuantumComputationQuantum 2012ANo ratings yet
- (2022), Bararnia and Esmaeilpour, On The Application of Physics Informed Neural Networks (PINN) To Solve Boundary Layer Thermal-Fluid ProblemsDocument12 pages(2022), Bararnia and Esmaeilpour, On The Application of Physics Informed Neural Networks (PINN) To Solve Boundary Layer Thermal-Fluid ProblemsIndrasis MitraNo ratings yet
- QuantogibDocument1 pageQuantogibGeorge DerplNo ratings yet
- Study of Nano-Systems For Computer SimulationsDocument7 pagesStudy of Nano-Systems For Computer SimulationsFalak KoliNo ratings yet
- Entropy 25 00287 v2Document41 pagesEntropy 25 00287 v2oscar.negrete.sNo ratings yet
- Guest Editorial Complex Network For Modern Smart Grid Applications (Part 1: Analysis and Application)Document4 pagesGuest Editorial Complex Network For Modern Smart Grid Applications (Part 1: Analysis and Application)Sandy TondoloNo ratings yet
- Title - The Enigmatic World of Quantum Computing - Unveiling The Power of QubitsDocument2 pagesTitle - The Enigmatic World of Quantum Computing - Unveiling The Power of Qubitshaseeb.hussainy14No ratings yet
- A Case-Study in Open-Source CFD Code Verification, Part I: Convergence Rate Loss DiagnosisDocument20 pagesA Case-Study in Open-Source CFD Code Verification, Part I: Convergence Rate Loss DiagnosisMarco NicotraNo ratings yet
- Quantum Computer LayerDocument8 pagesQuantum Computer LayerWhats HahNo ratings yet
- Quantum Computers 2015 PDFDocument5 pagesQuantum Computers 2015 PDFdiaeshantonyNo ratings yet
- Folding@home: Lessons From Eight Years of Volunteer Distributed ComputingDocument8 pagesFolding@home: Lessons From Eight Years of Volunteer Distributed ComputingLucasOliveiraNo ratings yet
- ClaytronicsDocument8 pagesClaytronicsNeeraj GuptaNo ratings yet
- Solving The Discretised Boltzmann Transport Equations Using Neural NetworksDocument33 pagesSolving The Discretised Boltzmann Transport Equations Using Neural NetworksAntonio Carlos Firmino JuniorNo ratings yet
- IEEE Research WorkDocument9 pagesIEEE Research WorkEmin JabbrNo ratings yet
- QNNs Are Kernel MethodsDocument25 pagesQNNs Are Kernel MethodssashwatNo ratings yet
- RP 1Document13 pagesRP 1otakuNo ratings yet
- Quantum Computing Class Notes CinquanceDocument2 pagesQuantum Computing Class Notes CinquancebeanJuiceNo ratings yet
- Quantum Computing Class NotesDocument2 pagesQuantum Computing Class NotesbeanJuiceNo ratings yet
- Arqtic: A Full-Stack Software Package For Simulating Materials On Quantum ComputersDocument17 pagesArqtic: A Full-Stack Software Package For Simulating Materials On Quantum ComputersマルワNo ratings yet
- QR Factorization of Tall and Skinny Matrices in A Grid Computing EnvironmentDocument15 pagesQR Factorization of Tall and Skinny Matrices in A Grid Computing EnvironmenthamilearnNo ratings yet
- A Molecular Computing Approach To Solving Optimization Problems Via Programmable Microdroplet ArraysDocument18 pagesA Molecular Computing Approach To Solving Optimization Problems Via Programmable Microdroplet ArraysEly SianNo ratings yet
- Intro To QMLand QNNDocument13 pagesIntro To QMLand QNNSeyyed Adnan SeyyedyNo ratings yet
- SENSORS11Document13 pagesSENSORS11hppavillonNo ratings yet
- Race Logic: A Hardware Acceleration For Dynamic Programming AlgorithmsDocument12 pagesRace Logic: A Hardware Acceleration For Dynamic Programming AlgorithmsssfofoNo ratings yet
- A Spark-Based Parallel Distributed Posterior Decoding Algorithm For Big Data Hidden Markov Models Decoding ProblemDocument12 pagesA Spark-Based Parallel Distributed Posterior Decoding Algorithm For Big Data Hidden Markov Models Decoding ProblemIAES IJAINo ratings yet
- Research Paper MSCSDocument14 pagesResearch Paper MSCSEmin JabbrNo ratings yet
- The Future of Quantum ComputerDocument6 pagesThe Future of Quantum ComputerVIVA-TECH IJRINo ratings yet
- Advances in Quantum Computation and Quantum Technologies A Design Automation PerspectiveDocument18 pagesAdvances in Quantum Computation and Quantum Technologies A Design Automation PerspectiveanshulNo ratings yet
- QML Review SeveriniDocument26 pagesQML Review SeveriniLorenzo GregorisNo ratings yet
- Data-Driven Computation of Molecular Reaction Coordinates: Andreas Bittracher, Ralf Banisch, and Christof SCH UtteDocument24 pagesData-Driven Computation of Molecular Reaction Coordinates: Andreas Bittracher, Ralf Banisch, and Christof SCH Uttehuevonomar05No ratings yet
- Din MolecDocument70 pagesDin MolecRichard PachacamaNo ratings yet
- An Information Theory Approach To Network Evolution ModelsDocument24 pagesAn Information Theory Approach To Network Evolution ModelsHOLMAN AUDREY ALBA CASTRONo ratings yet
- JETC1204-39 - AhsanJETC2015Document25 pagesJETC1204-39 - AhsanJETC2015Muhammad AhsanNo ratings yet
- New Logic Synthesis As Nanotechnology EnablerDocument28 pagesNew Logic Synthesis As Nanotechnology EnablerserdarNo ratings yet
- 5080-Article Text-17819-1-10-20230830Document6 pages5080-Article Text-17819-1-10-20230830Arif Mu'amar WahidNo ratings yet
- David Luckhaus - From High Resolution Spectroscopy To Detailed Molecular Quantum DynamicsDocument8 pagesDavid Luckhaus - From High Resolution Spectroscopy To Detailed Molecular Quantum DynamicsMaxnamewNo ratings yet
- Joel M. Bowman Et Al - Variational Quantum Approaches For Computing Vibrational Energies of Polyatomic MoleculesDocument73 pagesJoel M. Bowman Et Al - Variational Quantum Approaches For Computing Vibrational Energies of Polyatomic MoleculesMaxnamewNo ratings yet
- Jonathan Tennyson - Fully Vibrationally Resolved Photoionisation of H2 and D2Document4 pagesJonathan Tennyson - Fully Vibrationally Resolved Photoionisation of H2 and D2MaxnamewNo ratings yet
- F. J. Lin - Reduced Phase Spaces in Molecular Dynamics: Coupling of Overall Rotation and Internal Motions in A Generalized Eckart FrameDocument16 pagesF. J. Lin - Reduced Phase Spaces in Molecular Dynamics: Coupling of Overall Rotation and Internal Motions in A Generalized Eckart FrameMaxnamewNo ratings yet
- G. Sansone Et Al - Electron Localization Following Attosecond Molecular PhotoionizationDocument5 pagesG. Sansone Et Al - Electron Localization Following Attosecond Molecular PhotoionizationMaxnamewNo ratings yet
- Tomohiro Yanao, Wang S. Koon and Jerrold E. Marsden - Mass Effects and Internal Space Geometry in Triatomic Reaction DynamicsDocument20 pagesTomohiro Yanao, Wang S. Koon and Jerrold E. Marsden - Mass Effects and Internal Space Geometry in Triatomic Reaction DynamicsMaxnamewNo ratings yet
- Debra Lewis - Lagrangian Block DiagonalizationDocument41 pagesDebra Lewis - Lagrangian Block DiagonalizationMaxnamewNo ratings yet
- Jonathan Tennyson and N. Chandra - PEAD: For The Calculation of Photoelectron Angular Distributions of Linear MoleculesDocument7 pagesJonathan Tennyson and N. Chandra - PEAD: For The Calculation of Photoelectron Angular Distributions of Linear MoleculesMaxnamewNo ratings yet
- B.T. Sutcliffe and J. Tennyson - The Construction and Fitting of Molecular Potential Energy Surfaces and Their Use in Vibration-Rotation CalculationsDocument14 pagesB.T. Sutcliffe and J. Tennyson - The Construction and Fitting of Molecular Potential Energy Surfaces and Their Use in Vibration-Rotation CalculationsMaxnamewNo ratings yet
- Jonathan Tennyson and Brian T. Sutcliffe - Highly Rotationally Excited States of Floppy Molecules: H2D + With J 20Document19 pagesJonathan Tennyson and Brian T. Sutcliffe - Highly Rotationally Excited States of Floppy Molecules: H2D + With J 20MaxnamewNo ratings yet
- Jonathan Tennyson Et Al - Continuum States of The Hydrogen Molecule With The R-Matrix MethodDocument10 pagesJonathan Tennyson Et Al - Continuum States of The Hydrogen Molecule With The R-Matrix MethodMaxnamewNo ratings yet
- Jonathan Tennyson - Quantum Vibrational Chaos in The ArHCI Van Der Waals MoleculeDocument11 pagesJonathan Tennyson - Quantum Vibrational Chaos in The ArHCI Van Der Waals MoleculeMaxnamewNo ratings yet
- Jonathan Tennyson - The Calculation of The Vibration-Rotation Energies of Triatomic Molecules Using Scattering CoordinatesDocument36 pagesJonathan Tennyson - The Calculation of The Vibration-Rotation Energies of Triatomic Molecules Using Scattering CoordinatesMaxnamewNo ratings yet
- Jonathan Tennyson and Brian T. Sutcliffe - Calculated Ro-Vibrational Spectrum of H2D +Document4 pagesJonathan Tennyson and Brian T. Sutcliffe - Calculated Ro-Vibrational Spectrum of H2D +MaxnamewNo ratings yet
- Jonathan Tennyson - On The Calculation of Matrix Elements Between Polynomial Basis FunctionsDocument3 pagesJonathan Tennyson - On The Calculation of Matrix Elements Between Polynomial Basis FunctionsMaxnamewNo ratings yet
- Jonathan Tennyson and Stavros C. Farantos - Vibrational Chaos in KCN: A Comparison of Quantum and Classical OscillationsDocument6 pagesJonathan Tennyson and Stavros C. Farantos - Vibrational Chaos in KCN: A Comparison of Quantum and Classical OscillationsMaxnamewNo ratings yet
- Jonathan Tennyson and Brian T. Sutcliffe - On The Rovibrational Levels of The H3 + and H2D + MoleculesDocument20 pagesJonathan Tennyson and Brian T. Sutcliffe - On The Rovibrational Levels of The H3 + and H2D + MoleculesMaxnamewNo ratings yet
- Calculated Ro-Vibrational Fine-Structure Spectrum and Weak-Field Zeeman Spli-Itings of The 0, Ar Van Der Waals MoleculeDocument8 pagesCalculated Ro-Vibrational Fine-Structure Spectrum and Weak-Field Zeeman Spli-Itings of The 0, Ar Van Der Waals MoleculeMaxnamewNo ratings yet
- Jonathan Tennyson and Ad Van Der Avoird - Effects of The Potential Anisotropy of The Calculated Fine-Structure Spectrum of O2HeDocument5 pagesJonathan Tennyson and Ad Van Der Avoird - Effects of The Potential Anisotropy of The Calculated Fine-Structure Spectrum of O2HeMaxnamewNo ratings yet
- W.J. Briels Et Al - Hindered Internal Rotations in Van Der Waals Molecules and Molecular CrystalsDocument10 pagesW.J. Briels Et Al - Hindered Internal Rotations in Van Der Waals Molecules and Molecular CrystalsMaxnamewNo ratings yet
- 9th International Symposium On Gas KineticsDocument484 pages9th International Symposium On Gas KineticsMaxnamewNo ratings yet
- R. Essers, J. Tennyson and P.E.S. Wormer - An SCF Potential Energy Surface For Lithium CyanideDocument5 pagesR. Essers, J. Tennyson and P.E.S. Wormer - An SCF Potential Energy Surface For Lithium CyanideMaxnamewNo ratings yet
- Grain Size StudyDocument14 pagesGrain Size StudyiyamNo ratings yet
- Smib TLabDocument13 pagesSmib TLabapi-3831923No ratings yet
- IAL - Mechanics 1 - FinalDocument25 pagesIAL - Mechanics 1 - FinalasifshahanaNo ratings yet
- 1039 SdofDocument8 pages1039 SdofMuhammad Yasser ANo ratings yet
- 544892main PS2 InertiaAndFriction C2 PDFDocument3 pages544892main PS2 InertiaAndFriction C2 PDFJohn David RamosNo ratings yet
- Cambridge International Advanced Subsidiary and Advanced LevelDocument12 pagesCambridge International Advanced Subsidiary and Advanced LevelredwanNo ratings yet
- Rolling Contact Fatigue Analysis of Rails Inculding Numerical Simulations of The Rail Manufacturing Process and Repeated Wheel-Rail Contact LoadsDocument12 pagesRolling Contact Fatigue Analysis of Rails Inculding Numerical Simulations of The Rail Manufacturing Process and Repeated Wheel-Rail Contact LoadsMarcelino Pereira Do NascimentoNo ratings yet
- ANSI-ASME PTC 11-1984.ventiladores PDFDocument138 pagesANSI-ASME PTC 11-1984.ventiladores PDFDavidFonsecaNo ratings yet
- No. 167 Guidelines For The Identification of Vibration Issues and Recommended Remedial Measures On Ships No. 167Document7 pagesNo. 167 Guidelines For The Identification of Vibration Issues and Recommended Remedial Measures On Ships No. 167Тодор ПеневNo ratings yet
- Numericals Class IX TMHDocument80 pagesNumericals Class IX TMHMr. JocularNo ratings yet
- Exercise Paper On Photoelectric EffectDocument4 pagesExercise Paper On Photoelectric EffectJohn Lorenzo100% (1)
- Tutorial 1 - Conduction in Cartiesian System: Thermal ConductivityDocument2 pagesTutorial 1 - Conduction in Cartiesian System: Thermal ConductivityJoe Ford MoralesNo ratings yet
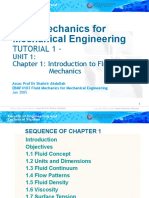
- EBMF4103 (Chapter 1) Fluid Mechanics For Mechanical EngineeringDocument32 pagesEBMF4103 (Chapter 1) Fluid Mechanics For Mechanical EngineeringMahmud AbdullahNo ratings yet
- Project 1Document3 pagesProject 1VivekKaushikNo ratings yet
- Viva Questios For Polarimeter ExperimentDocument4 pagesViva Questios For Polarimeter Experimentsojol ahmed100% (2)
- Transducers - E2020B-Tokyo Sokki Load Cells - 15-10-2018 PDFDocument92 pagesTransducers - E2020B-Tokyo Sokki Load Cells - 15-10-2018 PDFnasirch4u50% (2)
- Slaid Topik 6-Temperature and Heat2Document46 pagesSlaid Topik 6-Temperature and Heat2Md KhairulNo ratings yet
- ME8693 Heat and Mass Transfer L T P C 3 2 0 4 ObjectivesDocument2 pagesME8693 Heat and Mass Transfer L T P C 3 2 0 4 ObjectivesGEJENDHIRAN SNo ratings yet
- The First Law of Thermodynamics-2Document64 pagesThe First Law of Thermodynamics-2Sayan MondalNo ratings yet
- Determination of the viscosity coefficient of glycerin.: v= g (ρ ρ - v= s tDocument2 pagesDetermination of the viscosity coefficient of glycerin.: v= g (ρ ρ - v= s tفاطمة محمد الزهرانيNo ratings yet
- Correlation Between Engineering Stress-Strain and True Stress-Strain CurveDocument7 pagesCorrelation Between Engineering Stress-Strain and True Stress-Strain Curverodrigo93_vgNo ratings yet