0% found this document useful (0 votes)
15 views6 pagesNG2S231 Individual Assignment Brief 2023-2024
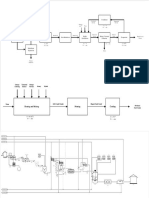
The document is an assessment cover sheet for an individual assignment in the Control & Instrumentation module, focusing on designing a PID regulator for a Mass-Spring-Damper system. It outlines submission details, assessment criteria, and tasks involving MATLAB scripts to analyze the system's open and closed loop responses. The assignment contributes to 40% of the total module marks and requires a report of up to 1500 words, including diagrams and proper referencing.
Uploaded by
danielnkpaji15Copyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
15 views6 pagesNG2S231 Individual Assignment Brief 2023-2024
The document is an assessment cover sheet for an individual assignment in the Control & Instrumentation module, focusing on designing a PID regulator for a Mass-Spring-Damper system. It outlines submission details, assessment criteria, and tasks involving MATLAB scripts to analyze the system's open and closed loop responses. The assignment contributes to 40% of the total module marks and requires a report of up to 1500 words, including diagrams and proper referencing.
Uploaded by
danielnkpaji15Copyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd