0% found this document useful (0 votes)
44 views8 pagesPID Controller - Formative Assesment
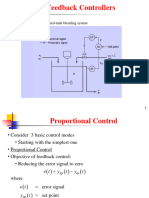
The document discusses three types of controllers: P, PI, and PID Controllers, which are used in feedback control systems to minimize the error between a desired setpoint and a measured process variable. The P Controller is simple and effective for quick responses but has limitations in eliminating steady-state errors, while the PI Controller improves upon it by adding an integral action to address persistent errors. The PID Controller further enhances control by incorporating a derivative action to anticipate future errors, making it versatile for various industrial applications, though tuning its parameters can be complex.
Uploaded by
Sathvik Ramineni9999Copyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
44 views8 pagesPID Controller - Formative Assesment
The document discusses three types of controllers: P, PI, and PID Controllers, which are used in feedback control systems to minimize the error between a desired setpoint and a measured process variable. The P Controller is simple and effective for quick responses but has limitations in eliminating steady-state errors, while the PI Controller improves upon it by adding an integral action to address persistent errors. The PID Controller further enhances control by incorporating a derivative action to anticipate future errors, making it versatile for various industrial applications, though tuning its parameters can be complex.
Uploaded by
Sathvik Ramineni9999Copyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd