Introduction to Control Systems
CCS-532 Ref: Chapter 1 & 2: Dorf, R. C. & Bishop, R. H. , Modern Control Systems Chapter 1 & 2: Nise, N. S. Control System Engineering
Dr Pavan Chakraborty IIIT-Allahabad
Indian Institute of Information Technology - Allahabad
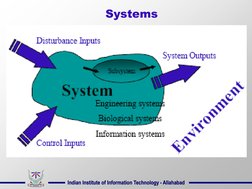
�Systems
Indian Institute of Information Technology - Allahabad
�What is Control and Control System?
Control is the process of causing a system variable to conform to some desired value. Manual control Automatic control (involving machines only the topic in this course). A Control system is an interconnection of components forming a system configuration that will provide a desired system response. Types of control Open-loop control
Closed-loop (feedback) control *
Indian Institute of Information Technology - Allahabad
�What is Control?
Manual versus Automatic Control
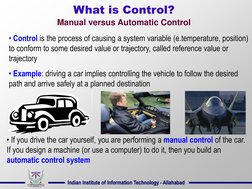
Control is the process of causing a system variable (e.temperature, position) to conform to some desired value or trajectory, called reference value or trajectory Example: driving a car implies controlling the vehicle to follow the desired path and arrive safely at a planned destination
If you drive the car yourself, you are performing a manual control of the car. If you design a machine (or use a computer) to do it, then you build an automatic control system
Indian Institute of Information Technology - Allahabad
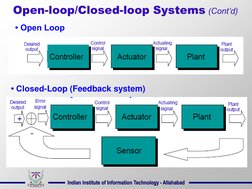
�Open-loop/Closed-loop Systems (Contd)
Open Loop
Closed-Loop (Feedback system)
Indian Institute of Information Technology - Allahabad
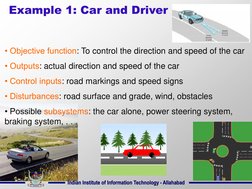
�Example 1: Car and Driver
Objective function: To control the direction and speed of the car
Outputs: actual direction and speed of the car
Control inputs: road markings and speed signs Disturbances: road surface and grade, wind, obstacles Possible subsystems: the car alone, power steering system, braking system, . . .
Indian Institute of Information Technology - Allahabad
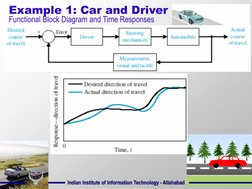
�Example 1: Car and Driver
Functional Block Diagram and Time Responses
Indian Institute of Information Technology - Allahabad
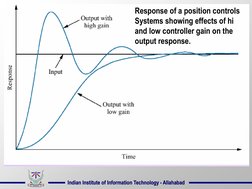
�Response of a position controls Systems showing effects of hi and low controller gain on the output response.
Indian Institute of Information Technology - Allahabad
�Indian Institute of Information Technology - Allahabad
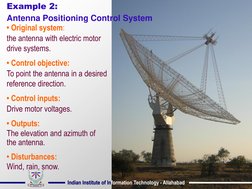
�Example 2: Antenna Positioning Control System Original system: the antenna with electric motor drive systems.
Control objective: To point the antenna in a desired reference direction.
Control inputs: Drive motor voltages. Outputs: The elevation and azimuth of the antenna. Disturbances: Wind, rain, snow.
Indian Institute of Information Technology - Allahabad
�Example 2: Antenna Positioning Control System
Original system: the antenna with electric motor drive systems.
Control objective: To point the antenna in a desired reference direction.
Control inputs: Drive motor voltages. Outputs: The elevation and azimuth of the antenna. Disturbances: Wind, rain, snow.
Indian Institute of Information Technology - Allahabad
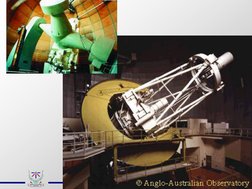
�Figure 1.8
The search for extraterrestrial life is being carried out with radio antennas like the one pictured here. A radio antenna is an example of a system with position controls.
Indian Institute of Information Technology - Allahabad
Peter Menzel.
�Figure 1.9
a. system concept; b. detailed layout; c. schematic;
Antenna azimuth position control system:
d. functional block diagram
Indian Institute of Information Technology - Allahabad
�Figure P1.1 Potentiometer
Indian Institute of Information Technology - Allahabad
�Antenna Positioning Control System:
Functional Block Diagram
Indian Institute of Information Technology - Allahabad
�General Structure of Control Systems
Elements in control systems: System/Plant/Process Sensors Actuators Controllers
Properties of control systems: Stability
Performance
Robustness
Indian Institute of Information Technology - Allahabad
�Control System Components
System, plant or process (to be controlled)
Actuators (converts the control signal to a power signal) Sensors (provides measurement of the system output)
Reference input (represents the desired output)
Error detection (forms the control error) Controller (operates on the control error to form the control signal, sometimes called compensators)
Indian Institute of Information Technology - Allahabad
�Basic Integrants in Control Systems
Analysis Given a system, to analyze the systems 1. Stability 2. Dynamic characteristics 3. Steady-state characteristics
Design (Synthesis) Design a new system or compensate (modify) an existing system for
1. Stability guarantee
2. Good dynamic performance
3. Satisfactory steady-state performance
Indian Institute of Information Technology - Allahabad
�Methods to be Covered for
Analysis and Design in the Course Modeling Laplace transforms and transfer functions, state-space model
Time-domain method Time-domain performance specifications Stability, transient and steady-state responses Complex-domain method Root locus method for analysis and design of control systems Frequency-domain method Frequency-domain performance specifications Nyquist plots and Bode diagrams for analysis and design of control systems Analysis and design methods based on state-space models
Indian Institute of Information Technology - Allahabad
�Control System Design Objectives
Primary objectives: 1. Dynamic stability 2. Accuracy 3. Speed of response
Additional considerations:
4. Robustness (insensitivity to parameter variation) 5. Cost of control
6. System reliability
Indian Institute of Information Technology - Allahabad
�Control System Design Steps
Indian Institute of Information Technology - Allahabad
�Figure 1.1 Simplified description of a control system
Control Systems Engineering, Fourth Edition by Norman S. Nise Copyright 2004 by John Wiley & Sons. All rights reserved.
Indian Institute of Information Technology - Allahabad
�Figure 1.2 Elevators
a. Early elevators were controlled by hand ropes or an elevator operator. Here, a rope is cut to demonstrate the safety brake, an innovation in early elevators; b. Modern Duo-lift elevators make their way up the Grande Arche in Paris, driven by one motor, with each car counterbalancing the other. Today, elevators are fully automatic, using control systems to regulate position and velocity.
Photos courtesy of United Technologies Otis Elevator.
Control Systems Engineering, Fourth Edition by Norman S. Nise Copyright 2004 by John Wiley & Sons. All rights reserved.
Indian Institute of Information Technology - Allahabad
�Figure 1.3
Rover was built to work in contaminated areas at Three Mile Island in Middleton, PA, where a nuclear accident occurred in 1979. The remote controlled robots long arm can be seen at the front of the vehicle.
Photo Hank Morgan/Rainbow/PNI.
Indian Institute of Information Technology - Allahabad
�Figure 1.4
a. Video laser disc player;
(a)
b. objective lens reading pits on a laser disc; c. optical path for play back showing tracking mirror rotated by a control system to keep the laser beam positioned on the pits.
(b)
(c)
Indian Institute of Information Technology - Allahabad
(c) Pioneer Electronics, Inc.
�Indian Institute of Information Technology - Allahabad
�Figure 1.7 Computer hard disk drive, showing disks and read/write head
Courtesy of Quantum Corp.
Indian Institute of Information Technology - Allahabad
�Figure 1.6 Block diagrams of control systems:
a. open-loop system;
b. closed-loop system
Indian Institute of Information Technology - Allahabad
�Figure1.5 Elevator input and output
Indian Institute of Information Technology - Allahabad
�Figure 1.11 The control system design process
Indian Institute of Information Technology - Allahabad
�Control Systems Design Process
Indian Institute of Information Technology - Allahabad
�Figure 1.12 Equivalent block diagram for the antenna
azimuth position control system
Indian Institute of Information Technology - Allahabad
�Table 1.1
Test waveforms used in control systems
Indian Institute of Information Technology - Allahabad
�Figure1.5 Elevator input and output
Indian Institute of Information Technology - Allahabad
�Figure P1.2 Aircraft attitude defined
Indian Institute of Information Technology - Allahabad
�Figure P1.3 Winder
J. Ayers, 1988.
Indian Institute of Information Technology - Allahabad
�Figure P1.4 Control of a nuclear reactor
Indian Institute of Information Technology - Allahabad
�Figure P1.5, Grinder system
1997, ASME.
Indian Institute of Information Technology - Allahabad
�Figure P1.9 High-speed rail system showing pantograph and catenary
1997, ASME.
Indian Institute of Information Technology - Allahabad
�Figure P1.8 RLC network
Indian Institute of Information Technology - Allahabad