You might also like
- Per Unit +examplesDocument8 pagesPer Unit +examplesfikri349483% (12)
- Self Tuning RegulatorsDocument25 pagesSelf Tuning Regulators15_01_1977_anand0% (1)
- Adaptive Control: Presented by Harikrishna Satish.TDocument22 pagesAdaptive Control: Presented by Harikrishna Satish.THari ThotaNo ratings yet
- Adaptive ControlDocument26 pagesAdaptive ControlKiran RavyNo ratings yet
- Position Control of Hybrid Stepper MotorDocument36 pagesPosition Control of Hybrid Stepper MotorAditya ChaudharyNo ratings yet
- A Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR TechniqueDocument13 pagesA Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR Technique3KaiserENo ratings yet
- Chapter 2Document31 pagesChapter 2Endalk SimegnNo ratings yet
- Modern Control Systems (MCS) : Lecture-30-31 Design of Control Systems in Sate SpaceDocument42 pagesModern Control Systems (MCS) : Lecture-30-31 Design of Control Systems in Sate SpaceBelayneh Tadesse100% (1)
- LQRDocument5 pagesLQRdrjoshreeNo ratings yet
- Project MatlabDocument10 pagesProject MatlabAbdullahNo ratings yet
- Control Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectDocument157 pagesControl Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectVijay IndukuriNo ratings yet
- Project:: Aditya Singh Vishnu Mhalaskar Akash Patil Deepak MauryaDocument21 pagesProject:: Aditya Singh Vishnu Mhalaskar Akash Patil Deepak MauryaBabbu MehraNo ratings yet
- Matlab Differentiation Matrix SuiteDocument55 pagesMatlab Differentiation Matrix SuiteRaghav VenkatNo ratings yet
- Experiment 1Document5 pagesExperiment 1HarshaPuttaguntaNo ratings yet
- Lecture 22-23-24 Time Domain Analysis of 2nd Order SystemsDocument73 pagesLecture 22-23-24 Time Domain Analysis of 2nd Order SystemsPradeep Kumar Mehta100% (1)
- Practical Class Two Matlab PracticalDocument6 pagesPractical Class Two Matlab PracticalPradyumnaSadgirNo ratings yet
- Lecture Time Domain Analysis of 2nd Order SystemsDocument12 pagesLecture Time Domain Analysis of 2nd Order SystemsFahadKhNo ratings yet
- Design ControllerDocument34 pagesDesign ControllerMaezinha_MarinelaNo ratings yet
- Modeling in The Time Domain: Omisol and TarifeDocument28 pagesModeling in The Time Domain: Omisol and TarifeRovick Tarife0% (1)
- Phase Plane Analysis PDFDocument27 pagesPhase Plane Analysis PDFjooooooNo ratings yet
- Report - Self Balancing BicycleDocument18 pagesReport - Self Balancing BicycleAniket PaithaneNo ratings yet
- Ch-5 Time Res WebpageDocument48 pagesCh-5 Time Res WebpageTushar GuptaNo ratings yet
- Chapter 2 System IInd Order ResponsesDocument38 pagesChapter 2 System IInd Order ResponsesAli AhmadNo ratings yet
- MAE653 Sp10 Lesson06Document9 pagesMAE653 Sp10 Lesson06Edwin MachacaNo ratings yet
- Chapter 3 - MatlabDocument59 pagesChapter 3 - MatlabZe SaNo ratings yet
- Differential Equations Solving For Impulse Response: D y DT + 5 Dy DT + 6y F (T)Document13 pagesDifferential Equations Solving For Impulse Response: D y DT + 5 Dy DT + 6y F (T)love_accNo ratings yet
- Solution To Homework Assignment 3Document2 pagesSolution To Homework Assignment 3Jackie DuanNo ratings yet
- Dynamic Charactorstics of An InstrumentsDocument30 pagesDynamic Charactorstics of An InstrumentsDhinakaran VeemanNo ratings yet
- Mathematical Modeling of Control SystemDocument31 pagesMathematical Modeling of Control SystemMegiNo ratings yet
- Dynamic Characteristics: Input Signal X (T) Output Signal y (T)Document29 pagesDynamic Characteristics: Input Signal X (T) Output Signal y (T)veenadivyakishNo ratings yet
- Vibrations in Engineering: Faculty of Civil Engineering and Applied MechanicsDocument133 pagesVibrations in Engineering: Faculty of Civil Engineering and Applied Mechanicsvuhoangdai90No ratings yet
- 6 - Design Based On Transfer FunctionDocument66 pages6 - Design Based On Transfer FunctionJosueNo ratings yet
- Advanced Control, Lecture 2,3, Modeling and LinearizationDocument48 pagesAdvanced Control, Lecture 2,3, Modeling and LinearizationsepehrNo ratings yet
- Numerical Solution of Initial Value ProblemsDocument17 pagesNumerical Solution of Initial Value ProblemslambdaStudent_eplNo ratings yet
- The Zero-State Response Sums of InputsDocument4 pagesThe Zero-State Response Sums of Inputsbaruaeee100% (1)
- 18 Adaptive ControlDocument7 pages18 Adaptive ControlFathi MusaNo ratings yet
- Digital Control Systems (DCS) : Lecture-1-2 Lead CompensationDocument61 pagesDigital Control Systems (DCS) : Lecture-1-2 Lead CompensationMeer Zafarullah NoohaniNo ratings yet
- System Identification and Adaptive Control TH 1.00 Ac29Document2 pagesSystem Identification and Adaptive Control TH 1.00 Ac29Akshay VijayanNo ratings yet
- The Performance of Feedback Control SystemsDocument37 pagesThe Performance of Feedback Control SystemsmrkmatNo ratings yet
- Files 2-Chapters 10 5 Transient Response SpecificationsDocument9 pagesFiles 2-Chapters 10 5 Transient Response SpecificationsYalemwork YargalNo ratings yet
- T7 - State Feedback Analysis and Design - 2021Document35 pagesT7 - State Feedback Analysis and Design - 2021James ChanNo ratings yet
- Probability Problems and SolutionsDocument3 pagesProbability Problems and SolutionsWoof Dawgmann0% (1)
- Modeling, Implementation, Simulation and Comparison of Different Control Theories On A Two Wheel Self Balancing Robot Model in SimulinkDocument5 pagesModeling, Implementation, Simulation and Comparison of Different Control Theories On A Two Wheel Self Balancing Robot Model in SimulinkMario CavazosNo ratings yet
- Self-Balancing Two-WheelerDocument5 pagesSelf-Balancing Two-WheelerVIVA-TECH IJRINo ratings yet
- Datta Meghe College of Engineering, AiroliDocument39 pagesDatta Meghe College of Engineering, AiroliMayuri patilNo ratings yet
- Time Response AnalysisDocument151 pagesTime Response AnalysisTushar GuptaNo ratings yet
- Lag CompensationDocument40 pagesLag CompensationMeer Zafarullah NoohaniNo ratings yet
- Model Reference Adaptive ControlDocument57 pagesModel Reference Adaptive ControlmervebayrakNo ratings yet
- Chapter 2.2 Response Ist Order SystemsDocument30 pagesChapter 2.2 Response Ist Order SystemsSyed AliNo ratings yet
- Lab Manual - EEE 402 - Exp01 July2014Document7 pagesLab Manual - EEE 402 - Exp01 July2014AhammadSifatNo ratings yet
- Lec12 ControlDocument19 pagesLec12 ControlbalkyderNo ratings yet
- Engineering Optimization: An Introduction with Metaheuristic ApplicationsFrom EverandEngineering Optimization: An Introduction with Metaheuristic ApplicationsNo ratings yet
- Ordinary Differential Equations: 1971 NRL—MRC ConferenceFrom EverandOrdinary Differential Equations: 1971 NRL—MRC ConferenceLeonard WeissNo ratings yet
- TVTIx Chapter6 EACT631 AdaptiveControl2Document30 pagesTVTIx Chapter6 EACT631 AdaptiveControl2abata yohannesNo ratings yet
- Marwan K. Abbadi Advisor: Dr. Winfred AnakwaDocument35 pagesMarwan K. Abbadi Advisor: Dr. Winfred AnakwaAniruddha NarkhedeNo ratings yet
- Optimization of A Control Loop Using Adaptive Method: K.Prabhu, Dr. V. Murali BhaskaranDocument6 pagesOptimization of A Control Loop Using Adaptive Method: K.Prabhu, Dr. V. Murali BhaskaranztztztztNo ratings yet
- Non-Linear Predictive Control of A DC-to-DC ConverterDocument5 pagesNon-Linear Predictive Control of A DC-to-DC ConvertermenguemengueNo ratings yet
- Research Paper ReviewDocument22 pagesResearch Paper ReviewSushmita KujurNo ratings yet
- Design of Feedback Controller For Boost Converter Using Optimization TechniqueDocument12 pagesDesign of Feedback Controller For Boost Converter Using Optimization Techniquekiem_nguyenmanhNo ratings yet
- Linear Variable Differential Transformer (LVDT)Document21 pagesLinear Variable Differential Transformer (LVDT)kanchi100% (1)
- Power Systems Engineering: With Additions by Ross Baldick, University of TexasDocument35 pagesPower Systems Engineering: With Additions by Ross Baldick, University of TexaskanchiNo ratings yet
- State SpaceDocument48 pagesState SpacekanchiNo ratings yet
- Transmission LinesDocument11 pagesTransmission LineskanchiNo ratings yet
- Z-Transform Theory: Itm, GurgaonDocument85 pagesZ-Transform Theory: Itm, GurgaonkanchiNo ratings yet
- SamplingDocument8 pagesSamplingkanchiNo ratings yet
- X X Y XG: Signal Flow GraphDocument46 pagesX X Y XG: Signal Flow GraphkanchiNo ratings yet
- Fundamentals of FlipflopsDocument52 pagesFundamentals of FlipflopskanchiNo ratings yet
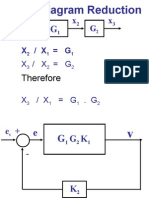
- G X X X: Block Diagram ReductionDocument12 pagesG X X X: Block Diagram ReductionkanchiNo ratings yet
- FR s500 ADocument64 pagesFR s500 Aadul koharruddin100% (1)
- Huygens' Principle, Maxwell's Displacement CurrentDocument7 pagesHuygens' Principle, Maxwell's Displacement CurrentGalleta Galleta MetralletaNo ratings yet
- Computer Organization and ArchitectureDocument3 pagesComputer Organization and ArchitecturecoolshubupaunikarNo ratings yet
- Ocn 2Document80 pagesOcn 2srividya.lNo ratings yet
- Complete ASIC Design Flow 2021 - VLSI UNIVERSEDocument4 pagesComplete ASIC Design Flow 2021 - VLSI UNIVERSENaganithesh GhattamaneniNo ratings yet
- Tronic KH 3157Document14 pagesTronic KH 3157geom.sncfNo ratings yet
- MedAir 2200 2017 PDFDocument41 pagesMedAir 2200 2017 PDFfrankj1No ratings yet
- User Manual For PCS1900&WCDMA1900 Dual Band Selective Pico RepeaterDocument28 pagesUser Manual For PCS1900&WCDMA1900 Dual Band Selective Pico RepeaterOscar Angel Valencia CruzNo ratings yet
- Tutorial 3Document3 pagesTutorial 3Afie Fahry AdzmiNo ratings yet
- Soft Start Circuit For Buck ConvertersDocument2 pagesSoft Start Circuit For Buck ConvertershsharghiNo ratings yet
- SMBJ5.0A-TR, CA-TR SMBJ188A-TR, CA-TR: TransilDocument6 pagesSMBJ5.0A-TR, CA-TR SMBJ188A-TR, CA-TR: TransilHudson CostaNo ratings yet
- Lift Control Board Manual VEG2000 (V4!3!115U) Rev2Document92 pagesLift Control Board Manual VEG2000 (V4!3!115U) Rev2Khaled ZakariaNo ratings yet
- Single Rail Power Supply Platform Atx12vo Design GuideDocument68 pagesSingle Rail Power Supply Platform Atx12vo Design GuideMechín Rodriguez EjvrNo ratings yet
- Renr6449renr6449-06 SisDocument6 pagesRenr6449renr6449-06 SisAntonioNo ratings yet
- IEC Motor Protection Book 3Document4 pagesIEC Motor Protection Book 3sajid munirNo ratings yet
- 2002 CT Saturation and Polarity TestDocument11 pages2002 CT Saturation and Polarity Testhashmishahbaz672100% (1)
- RTC1048 1901 1relay UP To 16 Program SMPSDocument4 pagesRTC1048 1901 1relay UP To 16 Program SMPSKishore KNo ratings yet
- ABBACS600 Technical CatalogueDocument128 pagesABBACS600 Technical CatalogueVenkatachalam KalyanasundaramNo ratings yet
- OHE BasicsDocument23 pagesOHE BasicsHemanth KumarNo ratings yet
- LT1076Document16 pagesLT1076Pham LongNo ratings yet
- Emergency Alert For Women Safety With LoDocument2 pagesEmergency Alert For Women Safety With Loventuramercia_472121No ratings yet
- 3500 02CatalogEDocument2 pages3500 02CatalogEquycoctuNo ratings yet
- Ee8591 Digital Signal Processing Part B & Part C Questions: Anna University Exams Regulation 2017Document2 pagesEe8591 Digital Signal Processing Part B & Part C Questions: Anna University Exams Regulation 2017Venkatesan SwamyNo ratings yet
- G-R 25Document27 pagesG-R 25Duncan VanderwallNo ratings yet
- Calentador TIH 030m InstrukcijaDocument16 pagesCalentador TIH 030m InstrukcijaReynaldo ZeballosNo ratings yet
- VCE Physics June 1999 - Solutions (19 June 1999) SoundDocument3 pagesVCE Physics June 1999 - Solutions (19 June 1999) SoundVimeshMunohurNo ratings yet
- Qaz36 522 109Document4 pagesQaz36 522 109leonataxNo ratings yet
- Jexpo Opening and Closing Rank 2017Document7 pagesJexpo Opening and Closing Rank 2017ANDO GAMERSNo ratings yet
- Ch7 Frequency Response PDFDocument50 pagesCh7 Frequency Response PDFtareq omarNo ratings yet