You might also like
- Duke Energy PremierNotes ProspectusDocument37 pagesDuke Energy PremierNotes ProspectusshoppingonlyNo ratings yet
- WWW - Ecra.gov - Sa PDF ImplementingregulationsDocument115 pagesWWW - Ecra.gov - Sa PDF ImplementingregulationsAbdul JabbarNo ratings yet
- Power System Restructuring and Deregulation, Loi Lei LaiDocument499 pagesPower System Restructuring and Deregulation, Loi Lei LaiMaría Sandra Udrízar100% (1)
- DATACENTERS Electrical DesignDocument46 pagesDATACENTERS Electrical Designhunterhead2100% (3)
- Desiccant Dehumidifier: ML SeriesDocument2 pagesDesiccant Dehumidifier: ML SeriesbinhjukiNo ratings yet
- Arc Welding RobotDocument33 pagesArc Welding Robotrakeshkaushik100% (1)
- Tripartite2015 Session6d LRPedersen BIMCODocument14 pagesTripartite2015 Session6d LRPedersen BIMCObritties69No ratings yet
- Wind Turbine Design ProcedureDocument4 pagesWind Turbine Design ProcedureEkambaramMuniyandi100% (1)
- Pandora Case Study - SlidesDocument25 pagesPandora Case Study - Slidesapi-442762968100% (2)
- Robotics for Assembly Automation Tutorial: Key Benefits and When to Incorporate RobotsDocument73 pagesRobotics for Assembly Automation Tutorial: Key Benefits and When to Incorporate RobotsIvan AvramovNo ratings yet
- Minor FalcONDocument15 pagesMinor FalcONGursimran Singh100% (1)
- IESLCoE Robotics-Assignment - 2Document11 pagesIESLCoE Robotics-Assignment - 2kavish malakaNo ratings yet
- Project Segway 3 WheelDocument26 pagesProject Segway 3 WheelMohit ChetwaniNo ratings yet
- PIC'PR Inspection Robot Cleans PipesDocument37 pagesPIC'PR Inspection Robot Cleans Pipesfheed aldhfeeriNo ratings yet
- Solar Operated Jib CraneDocument36 pagesSolar Operated Jib CraneJilly Arasu100% (1)
- Modernization of DC DrivesDocument4 pagesModernization of DC DrivesfaizanNo ratings yet
- MAR 2013 Course Notes - 16 2008-2009 AutomationDocument4 pagesMAR 2013 Course Notes - 16 2008-2009 Automationkhchan88No ratings yet
- A Simple Robust Voltage Control of High Power Sensorless Induction Motor Drives With High Start Torque DemandDocument8 pagesA Simple Robust Voltage Control of High Power Sensorless Induction Motor Drives With High Start Torque DemandsouravghimireyNo ratings yet
- AB - 18ME15 - EME - AMS - NINE Question of TEN Answered PDFDocument9 pagesAB - 18ME15 - EME - AMS - NINE Question of TEN Answered PDFVarun BharadwajNo ratings yet
- FinalpptnewDocument37 pagesFinalpptnewDinesh KumarNo ratings yet
- AndredeSousa ExtendedAbstractDocument10 pagesAndredeSousa ExtendedAbstractabidparipurnaNo ratings yet
- Application of A Mathematical Model For The Motoman MH-50 Industrial Robot's Electric Drive SystemDocument7 pagesApplication of A Mathematical Model For The Motoman MH-50 Industrial Robot's Electric Drive SystemIAES International Journal of Robotics and AutomationNo ratings yet
- Finalpptnew 1Document37 pagesFinalpptnew 1Dinesh KumarNo ratings yet
- Traction - Systems - High Power - RevB - 180916 - WebDocument24 pagesTraction - Systems - High Power - RevB - 180916 - WebAkshay KumarNo ratings yet
- ISSN No: 2456: International Open Access Journal International Open Access JournalDocument8 pagesISSN No: 2456: International Open Access Journal International Open Access JournalEditor IJTSRDNo ratings yet
- CM20170619 43609 08733Document26 pagesCM20170619 43609 08733Jonas CrixelNo ratings yet
- 89 Research Paper PDFDocument5 pages89 Research Paper PDFsnehax2No ratings yet
- Bilateral_Drive_GearA_Highly_Backdrivable_Reduction_Gearbox_for_Robotic_ActuatorsDocument13 pagesBilateral_Drive_GearA_Highly_Backdrivable_Reduction_Gearbox_for_Robotic_ActuatorsSerdar FildisNo ratings yet
- Toolkits 0908 E WebDocument21 pagesToolkits 0908 E Webvothanhbinh311099No ratings yet
- Self Balancing Two Wheeled Robot ReportDocument11 pagesSelf Balancing Two Wheeled Robot ReportMateo Agudelo GarcíaNo ratings yet
- Computational Multicopter DesignDocument10 pagesComputational Multicopter DesignMohd BabarNo ratings yet
- Design of Electro Mechanical ActuatorsDocument17 pagesDesign of Electro Mechanical Actuatorsmohdbaseerullah123No ratings yet
- PlanetaryrollerscrewsDocument48 pagesPlanetaryrollerscrewsgoooga299No ratings yet
- 700S High Performance DriveDocument142 pages700S High Performance Drivechibssa alemayehuNo ratings yet
- Two-wheeled inverted pendulum robot friction compensationDocument10 pagesTwo-wheeled inverted pendulum robot friction compensationJason ArensNo ratings yet
- 3 TVF5 2018 Moore Uber Jan181Document15 pages3 TVF5 2018 Moore Uber Jan181ebooks list1No ratings yet
- DownloadDocument11 pagesDownloadMehrshad GhasemabadiNo ratings yet
- Design Procedure of An Electrohydraulic Drive: Srishti Sharma, Ramesh R. Lekurwale, Amith MasadeDocument6 pagesDesign Procedure of An Electrohydraulic Drive: Srishti Sharma, Ramesh R. Lekurwale, Amith MasadeAshishNo ratings yet
- f05 Amirdatoo Rendallfarley ppt1Document26 pagesf05 Amirdatoo Rendallfarley ppt1edgarafonsecaNo ratings yet
- Motorised Jack With Rach Lock MechanismDocument26 pagesMotorised Jack With Rach Lock MechanismPrajay BhavsarNo ratings yet
- STA 2013 LiliaDocument6 pagesSTA 2013 LiliaHAFEDH ABIDNo ratings yet
- bdf2218a6a5dc79e285eda5335c49cdfDocument4 pagesbdf2218a6a5dc79e285eda5335c49cdfMarcelo Ramos RupayNo ratings yet
- Chapter 1. Project Background The ProjectDocument12 pagesChapter 1. Project Background The ProjectHarold Borja ArellanoNo ratings yet
- MPrathyusha PMounica GKalyani GPrashanthi VenkataPhaniBabuV 30Document9 pagesMPrathyusha PMounica GKalyani GPrashanthi VenkataPhaniBabuV 30Anonymous kZswaZ69oNo ratings yet
- FROM COMBLIANT BALANCING TO DYNAMIC WALKINGDocument3 pagesFROM COMBLIANT BALANCING TO DYNAMIC WALKINGSebastin AshokNo ratings yet
- Industrial Control and Automation AssignmentDocument3 pagesIndustrial Control and Automation AssignmentJoao CarvalhoNo ratings yet
- An Introduction To Plug-and-Play Motion SubsystemsDocument5 pagesAn Introduction To Plug-and-Play Motion SubsystemsIlija BozovicNo ratings yet
- TWO-PLANE BALANCING SYSTEMDocument6 pagesTWO-PLANE BALANCING SYSTEMCaio FlemingNo ratings yet
- Finite Element Based Analysis of Rotating Robot PedestalDocument5 pagesFinite Element Based Analysis of Rotating Robot PedestalAnonymous kw8Yrp0R5rNo ratings yet
- Module 5 - Mechatronics in Computer Numerical Control (CNC) MachinesDocument80 pagesModule 5 - Mechatronics in Computer Numerical Control (CNC) MachinesSushant NaikNo ratings yet
- Actuator Selection and Performance ComparisonDocument3 pagesActuator Selection and Performance ComparisonMechanical EngineeringNo ratings yet
- Guidelines For Generator Stability Model Validation TestingDocument16 pagesGuidelines For Generator Stability Model Validation TestinggabriveragNo ratings yet
- IEEE Paper Report Multifunctional Machine ToolDocument5 pagesIEEE Paper Report Multifunctional Machine ToolVijesh Prem.p.vNo ratings yet
- Energies 15 08260 v3Document39 pagesEnergies 15 08260 v313.ธนดล กองธรรมNo ratings yet
- Rejith Nair Rajeev CUSAT ANT SeminarDocument33 pagesRejith Nair Rajeev CUSAT ANT SeminarRejith NairNo ratings yet
- Project Title...Document7 pagesProject Title...Abhishek ShahNo ratings yet
- Good Sweet Stroebel ASME JDSMC 1985Document8 pagesGood Sweet Stroebel ASME JDSMC 1985Girish WaghNo ratings yet
- Slightam-Industry Summit Presentation Efficient Integrated Freeform Flexible Hydraulic ActuatorsDocument34 pagesSlightam-Industry Summit Presentation Efficient Integrated Freeform Flexible Hydraulic ActuatorsdavpaffNo ratings yet
- Pipe Inspection RobotDocument7 pagesPipe Inspection RobotSharanabasappa SajjanNo ratings yet
- Machinedesign 14061 WTD Drives PdflayoutDocument3 pagesMachinedesign 14061 WTD Drives PdflayoutuuhebinNo ratings yet
- Literature Review of Speed Control of DC Motor Using ChopperDocument6 pagesLiterature Review of Speed Control of DC Motor Using ChopperafmzumwfxexgaoNo ratings yet
- PID Controller of Speed and Torque of ServoMotor Using MATLABDocument4 pagesPID Controller of Speed and Torque of ServoMotor Using MATLABNader_Al_QahfNo ratings yet
- Explore An Application in Dynamics: Linear ActuatorsDocument2 pagesExplore An Application in Dynamics: Linear Actuatorsmaryam rafieeNo ratings yet
- Desain Otomatis KonveyorDocument8 pagesDesain Otomatis KonveyoragungNo ratings yet
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- 5 ThinFilmSolarDocument18 pages5 ThinFilmSolarnomyisNo ratings yet
- Appendix Iin - Template For Recapitulation of Project CostDocument1 pageAppendix Iin - Template For Recapitulation of Project CostilsaNo ratings yet
- CESC Dhariwal 300 MW - ChandrapurDocument10 pagesCESC Dhariwal 300 MW - Chandrapurramnadh803181No ratings yet
- 2021 NFPA 70E - Highlight of ChangesDocument35 pages2021 NFPA 70E - Highlight of ChangesCarlos Julio Lozano PiedrahitaNo ratings yet
- Saxon Energy Services Parts QuoteDocument3 pagesSaxon Energy Services Parts QuoteNestAdánMoRenöNo ratings yet
- Ril RPL FinalDocument17 pagesRil RPL FinalmokaloNo ratings yet
- Alif Engineers and Planners ProfileDocument5 pagesAlif Engineers and Planners ProfileIrshad KhanNo ratings yet
- Eex Increase Motor Safety XXXXXDocument24 pagesEex Increase Motor Safety XXXXXSabah MantharNo ratings yet
- QCS-2010 Section 21 Part 31 Power Distribution Transformers PDFDocument3 pagesQCS-2010 Section 21 Part 31 Power Distribution Transformers PDFbryanpastor106No ratings yet
- Duravee HXL: Better Air Is Our BusinessDocument2 pagesDuravee HXL: Better Air Is Our BusinessAlejandro OsorioNo ratings yet
- Final Order - Case No 38 of 2014Document148 pagesFinal Order - Case No 38 of 2014sachinoilNo ratings yet
- Iift GKDocument113 pagesIift GKDishant MongaNo ratings yet
- BE 3rd SEMESTER QUESTION BANK BASIC ELECTRICAL MACHINE UNIT-1Document32 pagesBE 3rd SEMESTER QUESTION BANK BASIC ELECTRICAL MACHINE UNIT-1RajkumarJhapte0% (1)
- Breakwaters ICEDocument6 pagesBreakwaters ICESankar CdmNo ratings yet
- Foreignalpha 2014Document21 pagesForeignalpha 2014Palash KukwasNo ratings yet
- Sulphur Recovery Unit ReferencesDocument31 pagesSulphur Recovery Unit ReferencesprabhuarunkumarNo ratings yet
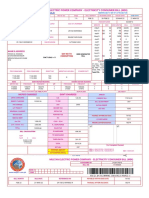
- Multan Electric Power Company - Electricity Consumer Bill (Mdi)Document1 pageMultan Electric Power Company - Electricity Consumer Bill (Mdi)Zohaib AhmadNo ratings yet
- NPDCL Citizen CharterDocument3 pagesNPDCL Citizen CharterGouse KhanNo ratings yet
- Aeroshell Book PDFDocument297 pagesAeroshell Book PDFFebry MulyaNo ratings yet
- Suva Exemplu Metoda-E BriciDocument35 pagesSuva Exemplu Metoda-E BricisilvercristiNo ratings yet
- Technical Manual for SAP Split System Air ConditionersDocument68 pagesTechnical Manual for SAP Split System Air Conditionersanilr008No ratings yet
- Blog 3 Advantages of Solar EnergyDocument2 pagesBlog 3 Advantages of Solar EnergyEMAMUL KABIRNo ratings yet
- Sinamics Sl150 Mining enDocument10 pagesSinamics Sl150 Mining ensykimk8921No ratings yet
- Using Sustainable Materials in The Design of SportDocument25 pagesUsing Sustainable Materials in The Design of SportMaureen Barretto SanturcasNo ratings yet