You might also like
- 12 Astrology Houses & Planets in HousesDocument22 pages12 Astrology Houses & Planets in HousesSreerangam Narasimharao100% (4)
- 2010 Handbook On Discovery Practice, Trial Lawyers Section of The Florida Bar & Conferences of The Circuit and County Courts JudgesDocument124 pages2010 Handbook On Discovery Practice, Trial Lawyers Section of The Florida Bar & Conferences of The Circuit and County Courts JudgesFloridaLegalBlog100% (3)
- Read The District Attorney's Full Report On The Olathe East ShootingDocument6 pagesRead The District Attorney's Full Report On The Olathe East ShootingThe Kansas City StarNo ratings yet
- Jean Genet - Deathwatch-Faber & Faber (1961) PDFDocument38 pagesJean Genet - Deathwatch-Faber & Faber (1961) PDFValentin MarcosNo ratings yet
- Master PowerShell Tricks Volume 1Document88 pagesMaster PowerShell Tricks Volume 1ZoranZasovski100% (1)
- Lecture-3 Problems Solving by SearchingDocument79 pagesLecture-3 Problems Solving by SearchingmusaNo ratings yet
- In Defense of Something Close To BiblicismDocument19 pagesIn Defense of Something Close To BiblicismLiem Sien LiongNo ratings yet
- TMC451 Sample - Skema JWPDocument2 pagesTMC451 Sample - Skema JWPraihana abdulkarimNo ratings yet
- Problem SolvingDocument85 pagesProblem Solvingiu1nguoiNo ratings yet
- Artificial IntelligenceDocument143 pagesArtificial IntelligenceBhuvaneshAngelsAngelsNo ratings yet
- Sokolnikoff Theory of ElasticityDocument491 pagesSokolnikoff Theory of ElasticityAdam Taylor88% (8)
- Problem Solving and SearchDocument100 pagesProblem Solving and SearchMohammad Omar FaruqNo ratings yet
- Cancer HandbookDocument15 pagesCancer Handbookdaddytrill777No ratings yet
- Artificial Intelligence (6CS6.2) Unit 1. A Introduction To Artificial IntelligenceDocument52 pagesArtificial Intelligence (6CS6.2) Unit 1. A Introduction To Artificial Intelligencevishakha_18No ratings yet
- Unit - 2 AiDocument66 pagesUnit - 2 Aichandru kNo ratings yet
- 1.2 Problem Solving - State Space Search (AIML)Document29 pages1.2 Problem Solving - State Space Search (AIML)Dogiparthi ManishaNo ratings yet
- 3.0 SearchDocument95 pages3.0 SearchKelvin KarisNo ratings yet
- Unit 2Document48 pagesUnit 2Kishan KumarNo ratings yet
- Uninformed Search: Some Material Adopted From Notes and Slides by Marie Desjardins and Charles R. DyerDocument56 pagesUninformed Search: Some Material Adopted From Notes and Slides by Marie Desjardins and Charles R. DyerOsaigbovo TimothyNo ratings yet
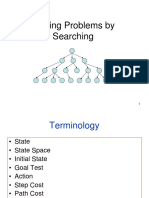
- Solving Problems by SearchingDocument67 pagesSolving Problems by SearchingDawit Shimeles TesfayeNo ratings yet
- Unit II-AI-KCS071Document45 pagesUnit II-AI-KCS071Sv tuberNo ratings yet
- Unit 2a PROBLEM SOLVING TECHNIQUES - Uninformed Search PDFDocument65 pagesUnit 2a PROBLEM SOLVING TECHNIQUES - Uninformed Search PDFMadhav ChaudharyNo ratings yet
- Water JugDocument18 pagesWater JugManvendra FauzdarNo ratings yet
- Problem SolvingDocument10 pagesProblem SolvingAnup MaharjanNo ratings yet
- Uninformed Search: Some Material Adopted From Notes by Charles R. Dyer, University of Wisconsin-MadisonDocument50 pagesUninformed Search: Some Material Adopted From Notes by Charles R. Dyer, University of Wisconsin-MadisonashNo ratings yet
- IAT-I Question Paper With Solution of 18CS71 Artificial Intelligence and Machine Learning Oct-2022-Dr. Paras Nath SinghDocument7 pagesIAT-I Question Paper With Solution of 18CS71 Artificial Intelligence and Machine Learning Oct-2022-Dr. Paras Nath SinghBrundaja D NNo ratings yet
- Artificial Intelligence and Machine LearningDocument19 pagesArtificial Intelligence and Machine LearningHIRAL AMARNATH YADAVNo ratings yet
- Problem Formulation & Solving by SearchDocument37 pagesProblem Formulation & Solving by SearchtauraiNo ratings yet
- Chapter 3 Problem Solving AgentsDocument69 pagesChapter 3 Problem Solving Agentshamba AbebeNo ratings yet
- Unit 2Document243 pagesUnit 2Gangadhar ReddyNo ratings yet
- Problems, Problem Spaces and SearchDocument54 pagesProblems, Problem Spaces and SearchTania CENo ratings yet
- Search 2014Document39 pagesSearch 2014AdityaNo ratings yet
- Chapitre 2Document80 pagesChapitre 2Chaima BelhediNo ratings yet
- State Space Search and Heuristic Search TechniquesDocument16 pagesState Space Search and Heuristic Search Techniques28Akshay LokhandeNo ratings yet
- AI File - 03 PDFDocument43 pagesAI File - 03 PDFNahim's kitchenNo ratings yet
- Artificial Intelligence: Unit - IDocument30 pagesArtificial Intelligence: Unit - Ibharat jainNo ratings yet
- AI Lecture 2Document19 pagesAI Lecture 2Hanoee AbdNo ratings yet
- Artificial Intelligence WINTER 2021 SOLU.Document15 pagesArtificial Intelligence WINTER 2021 SOLU.VivekNo ratings yet
- Syllabus: What Is Artificial Intelligence? ProblemsDocument66 pagesSyllabus: What Is Artificial Intelligence? ProblemsUdupiSri groupNo ratings yet
- Water Jug & MissionariesDocument52 pagesWater Jug & MissionariesAdmire ChaniwaNo ratings yet
- Algorithm Design Paradigms: General Approaches To The Construction of Efficient Solutions ToDocument7 pagesAlgorithm Design Paradigms: General Approaches To The Construction of Efficient Solutions ToSanthini KaNo ratings yet
- Artificial Intelligence SUMMER 2022 SOLU.Document14 pagesArtificial Intelligence SUMMER 2022 SOLU.VivekNo ratings yet
- Unit I-AiDocument31 pagesUnit I-Aigunalan gNo ratings yet
- State Space Search Lecture # 2Document34 pagesState Space Search Lecture # 2nazim aliNo ratings yet
- Water Jug Problem in AIDocument8 pagesWater Jug Problem in AISoumitra Roy ChowdhuryNo ratings yet
- Uninformed Search: Some Material Adopted From Notes and Slides by Marie Desjardins and Charles R. DyerDocument56 pagesUninformed Search: Some Material Adopted From Notes and Slides by Marie Desjardins and Charles R. DyerKhurram AbbasNo ratings yet
- Lecture 3 Problems Solving by SearchingDocument78 pagesLecture 3 Problems Solving by SearchingMd.Ashiqur RahmanNo ratings yet
- Unit 2 - Part 1Document67 pagesUnit 2 - Part 1Priyal PatelNo ratings yet
- Unit 2d ExtraReading (Compatibility Mode)Document56 pagesUnit 2d ExtraReading (Compatibility Mode)Madhav ChaudharyNo ratings yet
- Solving Problems by SearchingDocument82 pagesSolving Problems by SearchingJoyfulness EphaNo ratings yet
- P, P S A S: Roblems Roblem Paces ND EarchDocument52 pagesP, P S A S: Roblems Roblem Paces ND EarchPrakhar PathakNo ratings yet
- Chapter 2 Problem SolvingDocument205 pagesChapter 2 Problem SolvingheadaidsNo ratings yet
- Chapter 2 Problem SolvingDocument190 pagesChapter 2 Problem SolvingMegha GuptaNo ratings yet
- Ai Chapter 2Document24 pagesAi Chapter 2d2gb6whnd9No ratings yet
- CS361 AI Week2 Lecture2Document27 pagesCS361 AI Week2 Lecture2Mohamed HanyNo ratings yet
- CS 4700: Foundations of Artificial Intelligence: Bart Selman Problem Solving by Search R&N: Chapter 3Document69 pagesCS 4700: Foundations of Artificial Intelligence: Bart Selman Problem Solving by Search R&N: Chapter 3mahesh anavkarNo ratings yet
- Problems, Problem Space N Search (Lecture 6-11)Document86 pagesProblems, Problem Space N Search (Lecture 6-11)Roshan Mishra100% (1)
- UntitledDocument2 pagesUntitledAli SoomroNo ratings yet
- AI Unit-1-1Document61 pagesAI Unit-1-1GeethakshayaNo ratings yet
- Artificial IntelligenceDocument50 pagesArtificial IntelligencePriya SinghNo ratings yet
- Intelligent System Sem-VII Lab-ManualDocument33 pagesIntelligent System Sem-VII Lab-ManualFarru GhNo ratings yet
- Artificial IntelligenceDocument106 pagesArtificial IntelligenceCharith RcNo ratings yet
- Unit2 (1) - Read-OnlyDocument68 pagesUnit2 (1) - Read-OnlyalistersujoydsouzaNo ratings yet
- Teach 02 - 2020 Chapter-3Document75 pagesTeach 02 - 2020 Chapter-3abuNo ratings yet
- Genetic Algorithms TutorialsDocument29 pagesGenetic Algorithms TutorialsMustafamna Al SalamNo ratings yet
- Informed SearchDocument43 pagesInformed SearchHassan VilniusNo ratings yet
- Lecture 4Document17 pagesLecture 4SOUMYODEEP NAYAK 22BCE10547No ratings yet
- AI2 Problem-SolvingDocument30 pagesAI2 Problem-SolvingAfan AffaidinNo ratings yet
- Flood Fill: Flood Fill: Exploring Computer Vision's Dynamic TerrainFrom EverandFlood Fill: Flood Fill: Exploring Computer Vision's Dynamic TerrainNo ratings yet
- Fundamental Concepts of Computer NetworksDocument90 pagesFundamental Concepts of Computer Networkslamba5No ratings yet
- Dess P Box DetilsDocument23 pagesDess P Box Detilslamba5No ratings yet
- UgcnDocument1 pageUgcnlamba5No ratings yet
- Biometrics Prof. Phalguni Gupta Department of Computer Science and Engineering Indian Institute of Technology, KanpurDocument34 pagesBiometrics Prof. Phalguni Gupta Department of Computer Science and Engineering Indian Institute of Technology, Kanpurlamba5No ratings yet
- Module 1 - L1 - HistoryDocument6 pagesModule 1 - L1 - HistoryFinster C. BarosaNo ratings yet
- Marketing Strategy of Pepsi AssaignmentDocument48 pagesMarketing Strategy of Pepsi AssaignmentZekria Noori AfghanNo ratings yet
- NP and Computational Intractability: Slides by Kevin Wayne. All Rights ReservedDocument52 pagesNP and Computational Intractability: Slides by Kevin Wayne. All Rights ReservedpreethiNo ratings yet
- Individual Assignment - Negotiation Styles Analysis-Ayustina GiustiDocument3 pagesIndividual Assignment - Negotiation Styles Analysis-Ayustina GiustiAyustina GiustiNo ratings yet
- CinderellaDocument6 pagesCinderellaainiNo ratings yet
- Ent QuestionDocument4 pagesEnt QuestionS Balagopal SivaprakasamNo ratings yet
- Proposal On Comparative Study On TVS and HondaDocument7 pagesProposal On Comparative Study On TVS and HondaSatish KumarNo ratings yet
- 7541678Document11 pages7541678CaitlinNo ratings yet
- Impaired Social InteractionDocument3 pagesImpaired Social InteractionJOYCE ANNE SUERTE DAGDAGANNo ratings yet
- Cerita Sangkuriang Dalam Bahasa Inggris: Nama KelasDocument2 pagesCerita Sangkuriang Dalam Bahasa Inggris: Nama KelasSuleman MowilaNo ratings yet
- Secularity and Science What Scientists Around The World Really Think About Religion Elaine Howard Ecklund Full Download ChapterDocument51 pagesSecularity and Science What Scientists Around The World Really Think About Religion Elaine Howard Ecklund Full Download Chapterandrea.johnson263100% (15)
- ECS 202301 Lecture 5 2Document35 pagesECS 202301 Lecture 5 2Rhinndhi SakthyvelNo ratings yet
- Seedlink Ammar Zaky Farouk 1555954490086Document1 pageSeedlink Ammar Zaky Farouk 1555954490086Ammar ZakyNo ratings yet
- Adjectives and ComparisonDocument38 pagesAdjectives and ComparisonzulosmandNo ratings yet
- Daftar PustakaDocument11 pagesDaftar PustakaHilyaNo ratings yet
- Coradmin 2013 ADocument11 pagesCoradmin 2013 AMa. Tiffany T. CabigonNo ratings yet
- Santa Cruz Academy, Inc.: Senior High School Learning PlanDocument5 pagesSanta Cruz Academy, Inc.: Senior High School Learning Planchan borbonNo ratings yet
- Basic Résumé Types: 1. Chronological ResumeDocument9 pagesBasic Résumé Types: 1. Chronological ResumeDegee O. GonzalesNo ratings yet
- Chennai Public School Anna Nagar Christmas Holiday HomeworkDocument7 pagesChennai Public School Anna Nagar Christmas Holiday Homeworkcfgf8j8j100% (1)
- The Soul of Chemistry Is Its Dealing WithDocument83 pagesThe Soul of Chemistry Is Its Dealing WithParshantKumarBajajNo ratings yet
- Case Digest: GF Equity, Inc. V. Arturo Valenzona: Law Tech WorldDocument3 pagesCase Digest: GF Equity, Inc. V. Arturo Valenzona: Law Tech WorldShaira Mae CuevillasNo ratings yet