You might also like
- Calculation of Fin Efficiency For Wet and Dry Fins.Document16 pagesCalculation of Fin Efficiency For Wet and Dry Fins.Wilfredo Ruiz100% (1)
- DH Parameters PDFDocument122 pagesDH Parameters PDFyash523No ratings yet
- D-H Problems PDFDocument9 pagesD-H Problems PDFkrupachariNo ratings yet
- Section 18 Design of Plastic Gears PDFDocument15 pagesSection 18 Design of Plastic Gears PDFSergio CandiottiNo ratings yet
- ECR Overview Training - v2Document89 pagesECR Overview Training - v2krishnaNo ratings yet
- Unigraphics General Interview QuestionsDocument4 pagesUnigraphics General Interview Questionsruhari100% (2)
- Different DH ConventionsDocument20 pagesDifferent DH ConventionsomarNo ratings yet
- PDF - in - Manufacturing - The Future of 3D DocumentationDocument43 pagesPDF - in - Manufacturing - The Future of 3D DocumentationLuat NguyenNo ratings yet
- 3D CNC Machining GuideDocument24 pages3D CNC Machining Guideanant100% (2)
- Guide to Load Analysis for Durability in Vehicle EngineeringFrom EverandGuide to Load Analysis for Durability in Vehicle EngineeringP. JohannessonRating: 4 out of 5 stars4/5 (1)
- VISUAL REALISM - HIDDEN LINE REMOVALDocument35 pagesVISUAL REALISM - HIDDEN LINE REMOVALmuthupuviNo ratings yet
- Chapter 3 C DH Representation For Robotic ManipulatorsDocument88 pagesChapter 3 C DH Representation For Robotic ManipulatorsCharlton S.Inao100% (1)
- Computer Application in DesignDocument1 pageComputer Application in DesignAntony PrabuNo ratings yet
- CD 5291 Computer Aided Tools For ManufactiringDocument2 pagesCD 5291 Computer Aided Tools For ManufactiringGnaneswaran Narayanan63% (8)
- Lenksysteme NKW eDocument40 pagesLenksysteme NKW eKabilan Muthukannan100% (2)
- Ferrous: PrintedDocument40 pagesFerrous: PrintedsunsirNo ratings yet
- BIW Unit 1 NotesDocument50 pagesBIW Unit 1 NotesJhon bendNo ratings yet
- SeminarDocument29 pagesSeminarMohan UrsNo ratings yet
- Electrical Installation and Maintenance Grade 11: Learning CompetencyDocument15 pagesElectrical Installation and Maintenance Grade 11: Learning CompetencyCristal Gumalang100% (5)
- CAD-CAM Power Point PresentationDocument102 pagesCAD-CAM Power Point PresentationArgAshishGargNo ratings yet
- Force Analysis - PPSXDocument107 pagesForce Analysis - PPSXÖmer Faruk EkizNo ratings yet
- Chapter 3Document58 pagesChapter 3ketemaNo ratings yet
- 08 Robotics F16MTE Path and Trajectory PlanningDocument21 pages08 Robotics F16MTE Path and Trajectory PlanningasadNo ratings yet
- GD&TDocument1 pageGD&TJeevanNo ratings yet
- Chapter 5 (Trajectory Planning)Document24 pagesChapter 5 (Trajectory Planning)Saurabh ThakurNo ratings yet
- Lec02 ManipulatorsDocument7 pagesLec02 ManipulatorsMohamad YazidNo ratings yet
- Lecture 2-HypermeshDocument37 pagesLecture 2-Hypermeshkashish4u100% (1)
- Mechanical Vibrations QuestionDocument1 pageMechanical Vibrations QuestionFadi W MoussaNo ratings yet
- Sudharsan Engineering College: UNIT I Fundamentals of RobotsDocument7 pagesSudharsan Engineering College: UNIT I Fundamentals of RobotsmetkarthikNo ratings yet
- GD&T QuizDocument12 pagesGD&T QuizMathew JayNo ratings yet
- Ch-11 NC CNC DNC FMS Automation and RoboticsDocument191 pagesCh-11 NC CNC DNC FMS Automation and RoboticsPrateek BayalNo ratings yet
- GD&T Miscellaneous Topics and ExercisesDocument19 pagesGD&T Miscellaneous Topics and Exercisesmaddy_scribdNo ratings yet
- Actuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationDocument77 pagesActuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationAzim UcinNo ratings yet
- CAD Interview Questions Module 1Document3 pagesCAD Interview Questions Module 1venkatesh_1829No ratings yet
- Chapter 3: Shell Meshing: Checking and Editing MeshDocument12 pagesChapter 3: Shell Meshing: Checking and Editing Meshmadhan24aeroNo ratings yet
- 080 Manipulator Trajectory PlanningDocument23 pages080 Manipulator Trajectory PlanningJohan RojasNo ratings yet
- Introduction to Robot Kinematics and ManipulationDocument107 pagesIntroduction to Robot Kinematics and ManipulationBrittaney Bato100% (1)
- Unit 4 CADDocument45 pagesUnit 4 CADiampiyushsahuNo ratings yet
- Cadcam Geometric ModelingDocument31 pagesCadcam Geometric ModelingPankaj ChhabraNo ratings yet
- 2D Axisymmetric Threaded Connection: © 2011 ANSYS, Inc. July 12, 2013 1Document16 pages2D Axisymmetric Threaded Connection: © 2011 ANSYS, Inc. July 12, 2013 1minhnguyenvonhatNo ratings yet
- Mech Engg Syllabus Modified (R10) 11.3.2012Document57 pagesMech Engg Syllabus Modified (R10) 11.3.2012Srimanthula SrikanthNo ratings yet
- Classical Kinematis CHP 1-14Document95 pagesClassical Kinematis CHP 1-14kullayot suwantarojNo ratings yet
- Jacobians-Differential KinematicsDocument62 pagesJacobians-Differential KinematicsChay Tick FeiNo ratings yet
- Biw Welding Fixture Unit: Locating PinDocument3 pagesBiw Welding Fixture Unit: Locating Pinphani301No ratings yet
- Me III II DMM II LnotesDocument33 pagesMe III II DMM II LnotesChandu MallamNo ratings yet
- Muhammad Ridzuan Bin Amir Mohd Aizuddin Bin Hassanuddin Muhamad Fikri Bin OmarDocument16 pagesMuhammad Ridzuan Bin Amir Mohd Aizuddin Bin Hassanuddin Muhamad Fikri Bin OmarAfiq ZaabaNo ratings yet
- 05 JacobianDocument82 pages05 JacobianTonny ThanhNo ratings yet
- Design For Fatigue and Simulation of Glass Fibre Epoxy Composite Automobile Leaf SpringDocument22 pagesDesign For Fatigue and Simulation of Glass Fibre Epoxy Composite Automobile Leaf SpringjonNo ratings yet
- CATIA Interview QuesionsDocument64 pagesCATIA Interview Quesionshariganesh697556No ratings yet
- 9A03502 Dynamics of MachineryDocument4 pages9A03502 Dynamics of MachinerysivabharathamurthyNo ratings yet
- Q.no 1. For Thermal Analysis, The Field Variable IsDocument128 pagesQ.no 1. For Thermal Analysis, The Field Variable IsAMOL JAGTAPNo ratings yet
- 13 - Chapter - 3 - Kinematics of Backhoe PDFDocument36 pages13 - Chapter - 3 - Kinematics of Backhoe PDFKetul ShahNo ratings yet
- CadcamqbDocument6 pagesCadcamqbMukesh KumarNo ratings yet
- Additive Manufacturing: Presented by Nazma AmrinDocument23 pagesAdditive Manufacturing: Presented by Nazma AmrinSai SrinivasNo ratings yet
- Design and FabricationDocument31 pagesDesign and FabricationRajesh ShahNo ratings yet
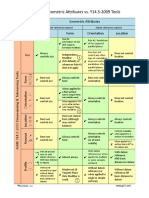
- Matrix of Geometric Attributes vs Y14.592009 ToolsDocument1 pageMatrix of Geometric Attributes vs Y14.592009 ToolsJesus GallardoNo ratings yet
- Robotics Toolbox For MATLAB Rel6Document6 pagesRobotics Toolbox For MATLAB Rel6Eduardo RodríguezNo ratings yet
- Industrial Robot KinematicsDocument5 pagesIndustrial Robot Kinematicsankit gandhi33% (3)
- Chapter 5Document112 pagesChapter 5Karthik RajashekarNo ratings yet
- Training Manual: I D I Ansys Introduction To ANSYSDocument6 pagesTraining Manual: I D I Ansys Introduction To ANSYSLUISALBERTO06011985No ratings yet
- CAE LAB MANUAL - JNTUA III B TechII SEM / SVTM /M RAMA NARASIMHA REDDYDocument96 pagesCAE LAB MANUAL - JNTUA III B TechII SEM / SVTM /M RAMA NARASIMHA REDDYreddyNo ratings yet
- Rules and Concepts of GD&T PDFDocument31 pagesRules and Concepts of GD&T PDFMahender KumarNo ratings yet
- Kinematics: Time To Derive Kinematics Model of The Robotic ArmDocument39 pagesKinematics: Time To Derive Kinematics Model of The Robotic Armnatnael demissieNo ratings yet
- Rotation and Transformation MatricesDocument56 pagesRotation and Transformation MatricesRam MNo ratings yet
- Vector Calculations in KinematicsDocument36 pagesVector Calculations in KinematicsKarthikeyanRamanujamNo ratings yet
- Linear Velocity, V, of A Point Is The Linear Displacement of That Point Per Unit Time. RecallDocument24 pagesLinear Velocity, V, of A Point Is The Linear Displacement of That Point Per Unit Time. RecallKarthikeyanRamanujamNo ratings yet
- Instantaneous Centre Method-Velocity at A Point: An Alternative Approach To The Relative Velocity MethodDocument61 pagesInstantaneous Centre Method-Velocity at A Point: An Alternative Approach To The Relative Velocity MethodKarthikeyanRamanujamNo ratings yet
- Position and Displacement Analysis in MechanismsDocument37 pagesPosition and Displacement Analysis in MechanismsKarthikeyanRamanujamNo ratings yet
- KDM 1Document42 pagesKDM 1KarthikeyanRamanujamNo ratings yet
- KDM 6Document54 pagesKDM 6KarthikeyanRamanujamNo ratings yet
- MR 1Document30 pagesMR 1KarthikeyanRamanujamNo ratings yet
- MR 2Document23 pagesMR 2KarthikeyanRamanujamNo ratings yet
- KDM 1Document42 pagesKDM 1KarthikeyanRamanujamNo ratings yet
- Quality Tools and Process MappingDocument54 pagesQuality Tools and Process MappingKarthikeyanRamanujamNo ratings yet
- Feed Box Acceptable Transmission Ratios and Transmission RangeDocument9 pagesFeed Box Acceptable Transmission Ratios and Transmission RangeKarthikeyanRamanujamNo ratings yet
- MR 2Document23 pagesMR 2KarthikeyanRamanujamNo ratings yet
- Machine Tool Gear Box DesignDocument38 pagesMachine Tool Gear Box DesignKarthikeyanRamanujam100% (1)
- Programmable Logic Controller (PLC) Based Pneumatic CircuitsDocument13 pagesProgrammable Logic Controller (PLC) Based Pneumatic CircuitsKarthikeyanRamanujamNo ratings yet
- MT 6Document39 pagesMT 6KarthikeyanRamanujamNo ratings yet
- Machine Tool DesignDocument41 pagesMachine Tool DesignKarthikeyanRamanujamNo ratings yet
- Machine Tool Engineering Guide - Layout, Kinematics, Design, Control & NC ProgrammingDocument41 pagesMachine Tool Engineering Guide - Layout, Kinematics, Design, Control & NC ProgrammingKarthikeyanRamanujamNo ratings yet
- Power Screw DesignDocument37 pagesPower Screw DesignKarthikeyanRamanujamNo ratings yet
- SS 460 60MDHDocument2 pagesSS 460 60MDHelisianeNo ratings yet
- Dissolved Oxygen - ADS550-EN Rev. HDocument20 pagesDissolved Oxygen - ADS550-EN Rev. HAshutosh MohantyNo ratings yet
- Led Bulb FuckDocument20 pagesLed Bulb FuckSurya reddyNo ratings yet
- Aqa 83001H QP Jun19Document24 pagesAqa 83001H QP Jun19himakshee singhviNo ratings yet
- Basic Maths & VectorsDocument10 pagesBasic Maths & Vectorskarthi karthiNo ratings yet
- Welding Distortion Control in Thin Metal Plates by Altering Heat Input Through Weld ParametersDocument7 pagesWelding Distortion Control in Thin Metal Plates by Altering Heat Input Through Weld ParametersGanesh R NairNo ratings yet
- AKM 2G Servo Motor: Selection GuideDocument84 pagesAKM 2G Servo Motor: Selection GuideVahan KirakosyanNo ratings yet
- Nuclear Fission Chain Reaction ExplainedDocument13 pagesNuclear Fission Chain Reaction ExplainedSmexy PatataNo ratings yet
- Learn 5 essentials of welding carbon steel platesDocument9 pagesLearn 5 essentials of welding carbon steel platesJerome A. GomezNo ratings yet
- 4FE-28Y-40P With FHU+60Document17 pages4FE-28Y-40P With FHU+60tedychrNo ratings yet
- Function of Several VariablesDocument4 pagesFunction of Several VariablesKedhar Nadh GadiboinaNo ratings yet
- The Chemistry of F Block ElementsDocument17 pagesThe Chemistry of F Block ElementsSana AjmalNo ratings yet
- Scientific Communication-Bsc I Year Old Questions2076 - Khulla NoteDocument1 pageScientific Communication-Bsc I Year Old Questions2076 - Khulla Noteankishshrestha8No ratings yet
- Understanding Moores LawDocument136 pagesUnderstanding Moores Lawsasi kiran sNo ratings yet
- Two Year Medical (Phase-01) Test Planner - AY-2023-2024 Version 4.0Document3 pagesTwo Year Medical (Phase-01) Test Planner - AY-2023-2024 Version 4.0dedhomosapien2No ratings yet
- Aluminium Dome Roof InstallationDocument7 pagesAluminium Dome Roof Installationmuhammad.younisNo ratings yet
- 7 Things That Affect Your Vibration Frequency From The Point of View of Quantum PhysicsDocument12 pages7 Things That Affect Your Vibration Frequency From The Point of View of Quantum PhysicsLluisNo ratings yet
- Worksheet MagnetismDocument3 pagesWorksheet MagnetismVenkyNo ratings yet
- MF4202 Additive ManufacturingDocument159 pagesMF4202 Additive ManufacturingOptimMart InternationaleNo ratings yet
- Is 8000 ManualDocument152 pagesIs 8000 ManualmartinxueloNo ratings yet
- Sludge Transfer Pump - Nmr-601 M13-G-0950A/B: Upgrade Pier Marine Facilities at TanajibDocument53 pagesSludge Transfer Pump - Nmr-601 M13-G-0950A/B: Upgrade Pier Marine Facilities at TanajibchaitanyaNo ratings yet
- FG Wilson 6.8-22 kVA CAE Polymer Acoustic EnclosureDocument4 pagesFG Wilson 6.8-22 kVA CAE Polymer Acoustic EnclosurescribdledeeNo ratings yet
- Chap 1Document17 pagesChap 1Esiyak MengeshaNo ratings yet
- An Alternative Mathematical Model For Special Relativity Guy Tsabary and Aviv CensorDocument17 pagesAn Alternative Mathematical Model For Special Relativity Guy Tsabary and Aviv CensorYotam KatzirNo ratings yet
- Horizontal Single-Stage Centrifugal PumpsDocument52 pagesHorizontal Single-Stage Centrifugal PumpsMorgan HengNo ratings yet
- Ay2022 23 AsdaDocument6 pagesAy2022 23 AsdaWatermelon XSNo ratings yet