You might also like
- Rise Time, Settling Time, and Other Step-Response Characteristics - MATLAB Stepinfo - MathWorks América LatinaDocument12 pagesRise Time, Settling Time, and Other Step-Response Characteristics - MATLAB Stepinfo - MathWorks América LatinaLeopoldoPavesiNo ratings yet
- Lab 4Document8 pagesLab 4Mohd FazliNo ratings yet
- Linear System SimulationDocument9 pagesLinear System SimulationAnonymous iTJLpNVNo ratings yet
- Rise Time, Settling Time, and Other Step-Response Characteristics - MATLAB StepinfoDocument8 pagesRise Time, Settling Time, and Other Step-Response Characteristics - MATLAB StepinfoBryan PramadiNo ratings yet
- Activity No. 3 The Transfer Function and System ResponseDocument3 pagesActivity No. 3 The Transfer Function and System ResponseChester Kyles ColitaNo ratings yet
- CS Report 03Document7 pagesCS Report 03Faiza JamilNo ratings yet
- State Variable ModelsDocument13 pagesState Variable Modelsali alaaNo ratings yet
- Experiment 1Document13 pagesExperiment 1Mike QuinteroNo ratings yet
- Transfer FunctionDocument8 pagesTransfer Functionadaptive4u4527No ratings yet
- Control Lab Report Experiment No. 01 PDFDocument5 pagesControl Lab Report Experiment No. 01 PDFSiam HasanNo ratings yet
- Control Theory 11Document50 pagesControl Theory 11faestningNo ratings yet
- Control System PRT FileDocument12 pagesControl System PRT Filegaming jerryNo ratings yet
- Meen19111103 Lab 04Document9 pagesMeen19111103 Lab 04Engr. Usman WaheedNo ratings yet
- Untitled 5Document3 pagesUntitled 5xigis95867No ratings yet
- Control Example Using MatlabDocument37 pagesControl Example Using MatlabRizkie Denny PratamaNo ratings yet
- Mathematical Modelling& Various Control System Models & Responses Using MatlabDocument45 pagesMathematical Modelling& Various Control System Models & Responses Using MatlabJagabandhu KarNo ratings yet
- Matlab Simulink For Control082pDocument39 pagesMatlab Simulink For Control082pWills TtaccaNo ratings yet
- Laboratory in Automatic Control: Lab 5 System PerformanceDocument20 pagesLaboratory in Automatic Control: Lab 5 System PerformancenchubcclNo ratings yet
- All CodesDocument8 pagesAll Codesa7med.3mvrNo ratings yet
- Exercises 16.06 16.07 Matlab SimulinkDocument6 pagesExercises 16.06 16.07 Matlab SimulinkflowerboyNo ratings yet
- Advanced Control Lab (Ee-21321) Experiment No: 02: % Continuous Time Transfer Function %Document3 pagesAdvanced Control Lab (Ee-21321) Experiment No: 02: % Continuous Time Transfer Function %Sudhakar KumarNo ratings yet
- Control System IDocument12 pagesControl System IKhawar RiazNo ratings yet
- Feedback and Control Systems: Activity No. 1 - System Modeling and SimulationDocument13 pagesFeedback and Control Systems: Activity No. 1 - System Modeling and SimulationkennethNo ratings yet
- Aim: - To Find Transpose of A Given Matrix. Apparatus: - MATLAB Kit. TheoryDocument10 pagesAim: - To Find Transpose of A Given Matrix. Apparatus: - MATLAB Kit. TheoryGaurav MishraNo ratings yet
- MATLAB Tutor Presntation PDFDocument26 pagesMATLAB Tutor Presntation PDFFares GetahunNo ratings yet
- Regularized Linear Regression Bias and VarianceDocument6 pagesRegularized Linear Regression Bias and Varianceplnikhilm23No ratings yet
- 3723 Lecture 18Document41 pages3723 Lecture 18Reddy BabuNo ratings yet
- Presentation For ControllerDocument42 pagesPresentation For ControllerAlakshendra JohariNo ratings yet
- Feedback and Control Systems Lab ManualDocument72 pagesFeedback and Control Systems Lab Manualmamaw231100% (1)
- Assessment Report: ObjectiveDocument12 pagesAssessment Report: Objectivef158354 Muhammad HaseebNo ratings yet
- Experiment 5 State Variable ModelsDocument6 pagesExperiment 5 State Variable Modelsalia khanNo ratings yet
- Lab Design Questions 2011-12-2Document1 pageLab Design Questions 2011-12-2Nazmi AzizNo ratings yet
- Kilian 2009 CodeDocument25 pagesKilian 2009 CodeJongkol NaenonNo ratings yet
- Experiment No. 5 Study of The Effect of A Forward-Path Lead Compensator On The Performance of A Linear Feedback Control SystemDocument3 pagesExperiment No. 5 Study of The Effect of A Forward-Path Lead Compensator On The Performance of A Linear Feedback Control SystemSubhaNo ratings yet
- Feedback and Control Systems: Activity No. 2 - Time Response of Dynamic SystemsDocument15 pagesFeedback and Control Systems: Activity No. 2 - Time Response of Dynamic SystemsYvesExequielPascuaNo ratings yet
- Matlab and The Control System ToolboxDocument62 pagesMatlab and The Control System Toolboxchungk52No ratings yet
- QB BcsDocument10 pagesQB BcsKrishna Reddy Y.VNo ratings yet
- Wala Pa NahumanDocument3 pagesWala Pa NahumanJohnCarloTigueNo ratings yet
- Department of Electrical and Electronics Engineering Matlab Theory and Practice (ELEC 403) Module V, Assignment 5Document6 pagesDepartment of Electrical and Electronics Engineering Matlab Theory and Practice (ELEC 403) Module V, Assignment 5BABAJINo ratings yet
- Submitted To: Dr. Tushar Kanti Roy Associate Professor Dept. of ETE, RUET Submitted By: Name: Aminur Rahman Bahar Roll: 1704033 Year: 3 Year (ODD) Submission Date: 23-08-21Document10 pagesSubmitted To: Dr. Tushar Kanti Roy Associate Professor Dept. of ETE, RUET Submitted By: Name: Aminur Rahman Bahar Roll: 1704033 Year: 3 Year (ODD) Submission Date: 23-08-21mbchNo ratings yet
- Exp 7 MatlabDocument11 pagesExp 7 MatlabKevin BlotsNo ratings yet
- Program 1: Write A Program Using MATLAB To Plot Pole Zero Map While Transfer Function Is GivenDocument21 pagesProgram 1: Write A Program Using MATLAB To Plot Pole Zero Map While Transfer Function Is GivenShruti BhatnagarNo ratings yet
- Tasks: 1. Find The Poles of The System G(S) 1/ (S 2 6s+25) : Using MatlabDocument10 pagesTasks: 1. Find The Poles of The System G(S) 1/ (S 2 6s+25) : Using MatlabSyed Md. Affanul Karim ShouravNo ratings yet
- Simulating Control Systems With Simulink and MATLABDocument5 pagesSimulating Control Systems With Simulink and MATLABsaharNo ratings yet
- Activity01 (1) CarreonDocument14 pagesActivity01 (1) CarreonHaja Kiev Erenz CarreonNo ratings yet
- Control System Lab Manual (Kec-652)Document29 pagesControl System Lab Manual (Kec-652)VIKASH YADAVNo ratings yet
- Using MATLAB and Simulink ForDocument22 pagesUsing MATLAB and Simulink ForJojo KawayNo ratings yet
- τ dy dt yt Kut + = τ: s u s K s yDocument2 pagesτ dy dt yt Kut + = τ: s u s K s ySpin FotonioNo ratings yet
- Using MATLAB For Dynamic Process Behavior AnalysisDocument2 pagesUsing MATLAB For Dynamic Process Behavior AnalysisHyukLadezaNo ratings yet
- محاضرة 1Document24 pagesمحاضرة 1OmaNo ratings yet
- Fuzzy Idle Speed ControlDocument6 pagesFuzzy Idle Speed ControlIkhwanul KhairiNo ratings yet
- Danial ReportDocument11 pagesDanial ReportImran AliNo ratings yet
- DampingDocument8 pagesDampingmoizNo ratings yet
- Control Systems MATLAB FileDocument25 pagesControl Systems MATLAB FileAgamNo ratings yet
- 3 Types of Gradient Descent Algorithms For Small & Large DatasetsDocument9 pages3 Types of Gradient Descent Algorithms For Small & Large Datasetscontactcenter2 LiderNo ratings yet
- I. General Simulation Concept: (68%, Problems 1-7: 3 Points Each, Problem 8: 2 Points Each)Document3 pagesI. General Simulation Concept: (68%, Problems 1-7: 3 Points Each, Problem 8: 2 Points Each)Sharif M Mizanur RahmanNo ratings yet
- LAB 1: Introduction To MATLAB and SimulinkDocument14 pagesLAB 1: Introduction To MATLAB and Simulinkwanxin leiNo ratings yet
- C Programming - Lecture IIIDocument12 pagesC Programming - Lecture IIISalih ÇabukNo ratings yet
- Find The Positive Root of The Equation Correct To Five Decimal PlacesDocument5 pagesFind The Positive Root of The Equation Correct To Five Decimal PlacesPramod GowdaNo ratings yet
- Amrita School of Engineering Amrita Vishwa Vidyapeetham, Bengaluru CampusDocument1 pageAmrita School of Engineering Amrita Vishwa Vidyapeetham, Bengaluru CampusPramod GowdaNo ratings yet
- International Business ManagemnetDocument12 pagesInternational Business ManagemnetPramod GowdaNo ratings yet
- Assignment SubmissionDocument13 pagesAssignment SubmissionPramod GowdaNo ratings yet
- Assignment Perfomance Management and AppraisalDocument11 pagesAssignment Perfomance Management and AppraisalPramod GowdaNo ratings yet
- Lecture One: Basics of Materials Handling EquipmentDocument47 pagesLecture One: Basics of Materials Handling EquipmentPramod GowdaNo ratings yet
- Talent ManagementDocument8 pagesTalent ManagementPramod GowdaNo ratings yet
- Workshop Brochure 3d Printing and Design 16-20octDocument2 pagesWorkshop Brochure 3d Printing and Design 16-20octPramod GowdaNo ratings yet
- Consent Letter For SPOCs - SIH2020Document1 pageConsent Letter For SPOCs - SIH2020Pramod GowdaNo ratings yet
- Innovation Contest EvaluationDocument1 pageInnovation Contest EvaluationPramod GowdaNo ratings yet
- Pid Controllers ProgramDocument6 pagesPid Controllers ProgramPramod GowdaNo ratings yet
- Question 1: 10 Marks Question 2: 10 Marks: 19AIE102 Introduction To Digital Manufacturing Answer All The QuestionsDocument1 pageQuestion 1: 10 Marks Question 2: 10 Marks: 19AIE102 Introduction To Digital Manufacturing Answer All The QuestionsPramod GowdaNo ratings yet
- Academia-Industry Pavilion at IMTEX 2017: Reply FormDocument1 pageAcademia-Industry Pavilion at IMTEX 2017: Reply FormPramod GowdaNo ratings yet
- Provide These Details For NIRF Purpose: UG (4 Year Program(s) ) : Placement & Higher Studies For Previous 3 YearsDocument1 pageProvide These Details For NIRF Purpose: UG (4 Year Program(s) ) : Placement & Higher Studies For Previous 3 YearsPramod GowdaNo ratings yet
- 1) Trim TabDocument13 pages1) Trim TabPramod GowdaNo ratings yet
- Aerodynamics ProblemsDocument8 pagesAerodynamics ProblemsPramod GowdaNo ratings yet
- Amrita Cad ManualDocument64 pagesAmrita Cad ManualPramod GowdaNo ratings yet
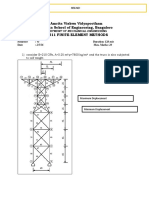
- Amrita Vishwa Vidyapeetham Amrita School of Engineering, Bangalore Mec311 Finite Element MethodsDocument2 pagesAmrita Vishwa Vidyapeetham Amrita School of Engineering, Bangalore Mec311 Finite Element MethodsPramod GowdaNo ratings yet