You might also like
- Danur Ilham Khoiruman 21060114130117 / A: Contoh 1: Kontrol Sistem Dengan PIDDocument6 pagesDanur Ilham Khoiruman 21060114130117 / A: Contoh 1: Kontrol Sistem Dengan PIDdanurilhamNo ratings yet
- Robotics Assignment - 1 Matlab Program On Symbolic Functions in Which Differential Equation, Constraints and Optimization Are IncludedDocument4 pagesRobotics Assignment - 1 Matlab Program On Symbolic Functions in Which Differential Equation, Constraints and Optimization Are Includedramphal chowkNo ratings yet
- PID ControllerDocument2 pagesPID ControllerKunal ChandaNo ratings yet
- Assignment FormatDocument53 pagesAssignment FormatJuthik BVNo ratings yet
- ZiglerDocument7 pagesZiglersjsdjNo ratings yet
- 'Unit Step Response' 'Pi - 1 Controller' 'Pi - 2controller' 'Pi - 3controller' 'Pid - 1 Controller' 'Pid - 2 Controller' 'Pid - 3 Controller'Document2 pages'Unit Step Response' 'Pi - 1 Controller' 'Pi - 2controller' 'Pi - 3controller' 'Pid - 1 Controller' 'Pid - 2 Controller' 'Pid - 3 Controller'sabbir hossainNo ratings yet
- E N: CS I/833: Tille: S PI & PDDocument4 pagesE N: CS I/833: Tille: S PI & PD9700216256No ratings yet
- Sistem Pengaturan: Josua Alexander Gultom 3C - D4 TOE - 1641220063Document7 pagesSistem Pengaturan: Josua Alexander Gultom 3C - D4 TOE - 1641220063Josua GultomNo ratings yet
- Control 12Document12 pagesControl 12Hashim AshaariNo ratings yet
- Lab#9: Steady State Error Analysis and DesignDocument9 pagesLab#9: Steady State Error Analysis and DesignHammad SattiNo ratings yet
- Num 1 Den (1 20 30) Plant TF (Num, Den) Step (Plant,'r') Xlabel ('Amplitude - ') Ylabel ('Time - ') Title ('Plant Function Response')Document7 pagesNum 1 Den (1 20 30) Plant TF (Num, Den) Step (Plant,'r') Xlabel ('Amplitude - ') Ylabel ('Time - ') Title ('Plant Function Response')mohanNo ratings yet
- All All: %%QUIZ %%teodoro Rios %% CC:1098814291Document19 pagesAll All: %%QUIZ %%teodoro Rios %% CC:1098814291Teodoro David Rios GarzonNo ratings yet
- EgyptDocument12 pagesEgyptSayaf KhanNo ratings yet
- Experiment No: 13 Transient and Steady State Response AnalysisDocument28 pagesExperiment No: 13 Transient and Steady State Response Analysisayesha amjadNo ratings yet
- ZN First Method of TuningDocument3 pagesZN First Method of TuningHamza AliNo ratings yet
- Exercise:: Solution: Code: Part ADocument4 pagesExercise:: Solution: Code: Part AAbdul Rehman AfzalNo ratings yet
- Experiment 10 P, D, I, Pi, PD and Pid Control of A Rotational SystemDocument3 pagesExperiment 10 P, D, I, Pi, PD and Pid Control of A Rotational SystemBhimsen ShresthaNo ratings yet
- Matlab Code For GP: N (1) D (1 10 20) Sys TF (N, D) Stepinfo (Sys) Step (Sys) Ans: Sys 1 S 2+10 S + 20 Step Response of GPDocument5 pagesMatlab Code For GP: N (1) D (1 10 20) Sys TF (N, D) Stepinfo (Sys) Step (Sys) Ans: Sys 1 S 2+10 S + 20 Step Response of GPMamoon KhiljiNo ratings yet
- Practica 3Document3 pagesPractica 3Ernesto Escarza RíosNo ratings yet
- Assignmnet 2Document8 pagesAssignmnet 2Siddhi SudkeNo ratings yet
- Example ProblemDocument7 pagesExample ProblemshaheerdurraniNo ratings yet
- S TF G 12/ (S 2+2 s+10) CL - G Feedback (G, 1) Step (CL - G) : %CP4.1 % Open Loop TF % Closed Loop With Unity FeedbackDocument5 pagesS TF G 12/ (S 2+2 s+10) CL - G Feedback (G, 1) Step (CL - G) : %CP4.1 % Open Loop TF % Closed Loop With Unity FeedbackSyed Ali HaiderNo ratings yet
- Self Tuning Problem SolutionDocument21 pagesSelf Tuning Problem SolutionLevi Aditya NugrahaNo ratings yet
- Session 6Document13 pagesSession 6mohammedNo ratings yet
- AIM OF THE EXPERIMENT: Closed Loop P, PI and PID Controller. Equipments RequiredDocument7 pagesAIM OF THE EXPERIMENT: Closed Loop P, PI and PID Controller. Equipments Requiredpriyatosh dashNo ratings yet
- EE 4343/5329 - Control System Design Project: EE 4343/5329 Homepage EE 4343/5329 Course OutlineDocument14 pagesEE 4343/5329 - Control System Design Project: EE 4343/5329 Homepage EE 4343/5329 Course OutlineAkmaral NauryzgalievaNo ratings yet
- Experiment 8 DC Motor Position Control SystemDocument15 pagesExperiment 8 DC Motor Position Control Systemprateek khotNo ratings yet
- Example Problem: Open-Loop Step ResponseDocument4 pagesExample Problem: Open-Loop Step ResponseJohn WareNo ratings yet
- OvershootDocument13 pagesOvershootEngr Ali Sarfraz SiddiquiNo ratings yet
- Lab 3: Task 1 Part A:: All AllDocument11 pagesLab 3: Task 1 Part A:: All AllSaud MudassarNo ratings yet
- Matlab Code of GWO Minimize Constrained Objective Function PID ControllerDocument5 pagesMatlab Code of GWO Minimize Constrained Objective Function PID ControllerMerera TaresaNo ratings yet
- 279 39 Solutions Instructor Manual Chapter 11 Power System StabilityDocument19 pages279 39 Solutions Instructor Manual Chapter 11 Power System StabilityAshutoshBhattNo ratings yet
- Ejercicios de Numerical Methods For Chemical Engineers With MATLAB Applications Ejercicio 2.1Document9 pagesEjercicios de Numerical Methods For Chemical Engineers With MATLAB Applications Ejercicio 2.1Abraham Juarez LuisNo ratings yet
- Project Based Learning IcsDocument14 pagesProject Based Learning IcsAvinash YadavNo ratings yet
- PID Controller Lab Exp5Document3 pagesPID Controller Lab Exp5Sanjoy Pathak100% (2)
- MatLab ControllerDocument10 pagesMatLab ControllerPRONOJIT HUNTERNo ratings yet
- Model Predictive Control Report by Ronak JainDocument9 pagesModel Predictive Control Report by Ronak JainRonak Jain100% (2)
- Lab Manual 07 LCS 44Document26 pagesLab Manual 07 LCS 44msania654No ratings yet
- PB Level Terukur Set Point Range Point X 100 X 100 1,2 Dep DT Ki Ep (DT) +po P KP - Ep Ki Ep (DT) Po KD Dep DT DT KD Dep P KP - Ep Ki Ep (T) Po T T KD KP - Ki Ep (T) Po)Document7 pagesPB Level Terukur Set Point Range Point X 100 X 100 1,2 Dep DT Ki Ep (DT) +po P KP - Ep Ki Ep (DT) Po KD Dep DT DT KD Dep P KP - Ep Ki Ep (T) Po T T KD KP - Ki Ep (T) Po)Navani Dwi NurisNo ratings yet
- Matlab CodeDocument13 pagesMatlab CodeSelva RajNo ratings yet
- Plant: A System To Be Controlled Controller: Provides The Excitation For The Plant Designed To Control The Overall System BehaviorDocument39 pagesPlant: A System To Be Controlled Controller: Provides The Excitation For The Plant Designed To Control The Overall System BehaviorMani Kumar ReddyNo ratings yet
- Chapter 8 - Feedback ControllerDocument35 pagesChapter 8 - Feedback ControllerFakhrulShahrilEzanieNo ratings yet
- Presentation On PID ControllerDocument26 pagesPresentation On PID ControllerSangramjit Sarkar100% (1)
- Matlab Programming Strategy For Vle With EosDocument7 pagesMatlab Programming Strategy For Vle With Eosmatheus735No ratings yet
- PID Algorithms (Topic 26)Document20 pagesPID Algorithms (Topic 26)MustaphaRamziNo ratings yet
- Escuela Politécnica Nacional Ingeniería Mecánica Mecatrónica Nombre: José Cuascota Paralelo: GR 1Document2 pagesEscuela Politécnica Nacional Ingeniería Mecánica Mecatrónica Nombre: José Cuascota Paralelo: GR 1José LuisNo ratings yet
- Lab 8 - 084Document6 pagesLab 8 - 084Ashar AsifNo ratings yet
- Tut 1Document2 pagesTut 1DECENT DECENT MUSINAINo ratings yet
- LCS Lab - 07Document10 pagesLCS Lab - 07glitchcue103No ratings yet
- Assignment 2: AnswerDocument13 pagesAssignment 2: AnswerAkash Ranjan SahooNo ratings yet
- Pid Control ExperimentDocument15 pagesPid Control Experimentazhar3303No ratings yet
- % File NVD4B - Sim1.m: FunctionDocument9 pages% File NVD4B - Sim1.m: FunctionNguyễn Vũ Minh ViệtNo ratings yet
- Adaptive PID Control MITDocument32 pagesAdaptive PID Control MITAbhinant PetchngamjaratNo ratings yet
- 2.153 Adaptive Control Adaptive PI Control: Anuradha AnnaswamyDocument26 pages2.153 Adaptive Control Adaptive PI Control: Anuradha AnnaswamyespaguetesNo ratings yet
- Vector: A (123456789) T 0:2:16 B A+2 C A+bDocument24 pagesVector: A (123456789) T 0:2:16 B A+2 C A+bMuhammad Adam HesaNo ratings yet
- Matlab ExamDocument25 pagesMatlab ExamAliceAlormenuNo ratings yet
- Quiz 4Document2 pagesQuiz 4Sebastián LorcaNo ratings yet
- Vortex Panel Method NACADocument5 pagesVortex Panel Method NACAVivaswan SinhaNo ratings yet
- PID Tuning Using Extremum SeekingDocument10 pagesPID Tuning Using Extremum Seekinggautam28461No ratings yet
- Mathematical Formulas for Economics and Business: A Simple IntroductionFrom EverandMathematical Formulas for Economics and Business: A Simple IntroductionRating: 4 out of 5 stars4/5 (4)
- Amrita School of Engineering Amrita Vishwa Vidyapeetham, Bengaluru CampusDocument1 pageAmrita School of Engineering Amrita Vishwa Vidyapeetham, Bengaluru CampusPramod GowdaNo ratings yet
- Talent ManagementDocument8 pagesTalent ManagementPramod GowdaNo ratings yet
- Find The Positive Root of The Equation Correct To Five Decimal PlacesDocument5 pagesFind The Positive Root of The Equation Correct To Five Decimal PlacesPramod GowdaNo ratings yet
- Assignment Perfomance Management and AppraisalDocument11 pagesAssignment Perfomance Management and AppraisalPramod GowdaNo ratings yet
- International Business ManagemnetDocument12 pagesInternational Business ManagemnetPramod GowdaNo ratings yet
- Workshop Brochure 3d Printing and Design 16-20octDocument2 pagesWorkshop Brochure 3d Printing and Design 16-20octPramod GowdaNo ratings yet
- Lecture One: Basics of Materials Handling EquipmentDocument47 pagesLecture One: Basics of Materials Handling EquipmentPramod GowdaNo ratings yet
- Assignment SubmissionDocument13 pagesAssignment SubmissionPramod GowdaNo ratings yet
- Innovation Contest EvaluationDocument1 pageInnovation Contest EvaluationPramod GowdaNo ratings yet
- Consent Letter For SPOCs - SIH2020Document1 pageConsent Letter For SPOCs - SIH2020Pramod GowdaNo ratings yet
- Aerodynamics ProblemsDocument8 pagesAerodynamics ProblemsPramod GowdaNo ratings yet
- Question 1: 10 Marks Question 2: 10 Marks: 19AIE102 Introduction To Digital Manufacturing Answer All The QuestionsDocument1 pageQuestion 1: 10 Marks Question 2: 10 Marks: 19AIE102 Introduction To Digital Manufacturing Answer All The QuestionsPramod GowdaNo ratings yet
- Provide These Details For NIRF Purpose: UG (4 Year Program(s) ) : Placement & Higher Studies For Previous 3 YearsDocument1 pageProvide These Details For NIRF Purpose: UG (4 Year Program(s) ) : Placement & Higher Studies For Previous 3 YearsPramod GowdaNo ratings yet
- Time Domain SpecificationsDocument10 pagesTime Domain SpecificationsPramod GowdaNo ratings yet
- Amrita Cad ManualDocument64 pagesAmrita Cad ManualPramod GowdaNo ratings yet
- Academia-Industry Pavilion at IMTEX 2017: Reply FormDocument1 pageAcademia-Industry Pavilion at IMTEX 2017: Reply FormPramod GowdaNo ratings yet
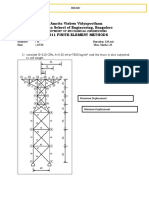
- Amrita Vishwa Vidyapeetham Amrita School of Engineering, Bangalore Mec311 Finite Element MethodsDocument2 pagesAmrita Vishwa Vidyapeetham Amrita School of Engineering, Bangalore Mec311 Finite Element MethodsPramod GowdaNo ratings yet
- 1) Trim TabDocument13 pages1) Trim TabPramod GowdaNo ratings yet
- Scaleup of Wet Granulation Processes Science Not Art CompressDocument6 pagesScaleup of Wet Granulation Processes Science Not Art CompressSangram KendreNo ratings yet
- C9 - Modern Robotics Mechanics, Planning, and Control by Frank C. Park Kevin M. Lynch - 2Document1 pageC9 - Modern Robotics Mechanics, Planning, and Control by Frank C. Park Kevin M. Lynch - 2Thế AnhNo ratings yet
- AXC 800-9-4 (5,5KW) IE2: Item NoDocument2 pagesAXC 800-9-4 (5,5KW) IE2: Item Nosiva ramakrishnanNo ratings yet
- 8M-003 Operation Manual For Purifier (SJ80F, SJ40F)Document291 pages8M-003 Operation Manual For Purifier (SJ80F, SJ40F)Leonid KolesnikovNo ratings yet
- 1998 - The Measurement and Control of Blast Induced Damage of Final Pit Walls in Open Pit Mining - W. Adamson, C.Scherpenisse - ISEE-1998Document18 pages1998 - The Measurement and Control of Blast Induced Damage of Final Pit Walls in Open Pit Mining - W. Adamson, C.Scherpenisse - ISEE-1998Elías Bravo CortésNo ratings yet
- Honeywell Solstice®454B R 454B TDS - EN 1Document4 pagesHoneywell Solstice®454B R 454B TDS - EN 1tcNo ratings yet
- KFT 131 - Physical Chemistry I April 08Document17 pagesKFT 131 - Physical Chemistry I April 08simparminNo ratings yet
- Drum Filling SystemDocument2 pagesDrum Filling SystemumeshNo ratings yet
- Bases Diseño TechnipDocument13 pagesBases Diseño TechnipJuan Roberto López BetanzosNo ratings yet
- Module 37 - Steel Beams 2001 and Steel PurlinsDocument3 pagesModule 37 - Steel Beams 2001 and Steel PurlinsClark Sibi100% (1)
- Workshop Catalogue: Engineered To LastDocument144 pagesWorkshop Catalogue: Engineered To Last高立璋No ratings yet
- Design of Strip FootingDocument8 pagesDesign of Strip FootingJaime Manalili Landingin0% (1)
- Learning Outcomes:: Minor Trouble Shooting: For Non-Qualified TechniciansDocument13 pagesLearning Outcomes:: Minor Trouble Shooting: For Non-Qualified TechniciansRyan CalicaNo ratings yet
- Specification Pendant TRUPORT 5000 (Trumpf-Germany)Document2 pagesSpecification Pendant TRUPORT 5000 (Trumpf-Germany)Rizkiana SamarindNo ratings yet
- Lec 6 Entropy and The Second Law of ThermodynamicsDocument77 pagesLec 6 Entropy and The Second Law of ThermodynamicsACCOUNT ONENo ratings yet
- ISL-G - Fuel Systems - Level Two - SourceFile - 092614 PDFDocument81 pagesISL-G - Fuel Systems - Level Two - SourceFile - 092614 PDFJorge Mario Candama Castro100% (1)
- Wu, Jonathan T. H - Geosynthetic Reinforced Soil (GRS) Walls-John Blackwell (2019)Document410 pagesWu, Jonathan T. H - Geosynthetic Reinforced Soil (GRS) Walls-John Blackwell (2019)Gustavo Henrique Rossi100% (1)
- Composite Steel Beam - ULS To AS5100.6 (Corrected 2016-07-27)Document24 pagesComposite Steel Beam - ULS To AS5100.6 (Corrected 2016-07-27)Sharyn PolleyNo ratings yet
- Drying: CHE133 Heat and Mass Transfer ApplicationsDocument22 pagesDrying: CHE133 Heat and Mass Transfer ApplicationsRA MemijeNo ratings yet
- AerofoilAnalysisusingXFOIL ResearchGateDocument16 pagesAerofoilAnalysisusingXFOIL ResearchGatechigurla ajayNo ratings yet
- E32 Speed Log SAL-840 ManualDocument59 pagesE32 Speed Log SAL-840 ManualBhavin DoshiNo ratings yet
- Exam 13Document5 pagesExam 13mohansiwan2025No ratings yet
- Lm2500 Ind Plus-g4-Dle Ipb Gek112768Document630 pagesLm2500 Ind Plus-g4-Dle Ipb Gek112768Оксана Козлитина100% (1)
- Bda 5 25Document34 pagesBda 5 25oNo ratings yet
- Individual Assignment Mem 560Document16 pagesIndividual Assignment Mem 560Ahmad SyamilNo ratings yet
- A4-P 4.0 enDocument32 pagesA4-P 4.0 enmkpqNo ratings yet
- Leakage Calculation Through ClearancesDocument7 pagesLeakage Calculation Through Clearanceschandrasingh4564No ratings yet
- The NSCP 2015 Provisions On The Use of QT TMT Reinforcing BarsDocument33 pagesThe NSCP 2015 Provisions On The Use of QT TMT Reinforcing BarsFritze Hansteen OngNo ratings yet
- Further Mechanics 1 Unit Test 1 Momentum and Impulse (Part 1) Mark SchemeDocument6 pagesFurther Mechanics 1 Unit Test 1 Momentum and Impulse (Part 1) Mark SchemeGavin Man20% (5)
- Flight ControlsDocument3 pagesFlight ControlsLoc Das NeyfusNo ratings yet