You might also like
- Coopertitchener Trifilar1Document30 pagesCoopertitchener Trifilar1api-24490620450% (2)
- 248 Lab 11Document10 pages248 Lab 11Tyron BiggumsNo ratings yet
- Solid - Liquid Equilibrium of A Binary SystemDocument36 pagesSolid - Liquid Equilibrium of A Binary SystemShela Mae Dindin100% (1)
- 3K4 2013 Assignment 2 Solutions PDFDocument9 pages3K4 2013 Assignment 2 Solutions PDFHanjin SeoNo ratings yet
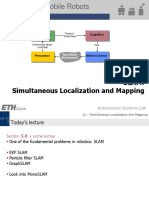
- Introduction To Mobile Robotics: SLAM: Simultaneous Localization and MappingDocument48 pagesIntroduction To Mobile Robotics: SLAM: Simultaneous Localization and MappingMoHamedNo ratings yet
- SLAM TutorialDocument68 pagesSLAM TutorialVihan MelakaNo ratings yet
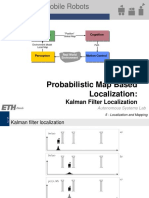
- Autonomous Mobile Robots: Probabilistic Map Based LocalizationDocument18 pagesAutonomous Mobile Robots: Probabilistic Map Based LocalizationEvangelista MaoNo ratings yet
- Outdoor Robot Navigation Using Gmapping Based SLAM AlgorithmDocument6 pagesOutdoor Robot Navigation Using Gmapping Based SLAM AlgorithmfpasanfiverNo ratings yet
- Lecture 8 Map Building 2Document34 pagesLecture 8 Map Building 2jack2423No ratings yet
- Space Simulation Lab ManualDocument55 pagesSpace Simulation Lab ManualBhanuNo ratings yet
- Probabilistic Robotics: SLAM: Robots Móviles UC3M Dep. de Ing. de Sistemas y AutomáticaDocument33 pagesProbabilistic Robotics: SLAM: Robots Móviles UC3M Dep. de Ing. de Sistemas y AutomáticaSara CMNo ratings yet
- Position Estimation Through Sensor Data Fusion and Path Control of An Omnidirectional RobotDocument6 pagesPosition Estimation Through Sensor Data Fusion and Path Control of An Omnidirectional RobotVictorSNo ratings yet
- Visual SLAM Why Bundle AdjustDocument7 pagesVisual SLAM Why Bundle Adjustragnoraffaele162No ratings yet
- Mapping Contoured Terrain - A Comparison of SLAM Algorithms For RAdioControlled HelicoptersDocument32 pagesMapping Contoured Terrain - A Comparison of SLAM Algorithms For RAdioControlled HelicoptersGeoFurrielNo ratings yet
- E023 Generalizations of The Common-Reflection-Surface StackDocument4 pagesE023 Generalizations of The Common-Reflection-Surface Stack828391No ratings yet
- Lecture 11 PDFDocument51 pagesLecture 11 PDFEvangelista MaoNo ratings yet
- Monocular LasaerDocument5 pagesMonocular LasaerinnoodiraNo ratings yet
- Lecture10 PDFDocument54 pagesLecture10 PDFEvangelista MaoNo ratings yet
- Simultaneous Localization and Mapping ! SLAM: York University, Toronto, Ontario June 20, 2005Document12 pagesSimultaneous Localization and Mapping ! SLAM: York University, Toronto, Ontario June 20, 2005wlogwlogNo ratings yet
- EE331 - L09 - Signals & SystemsDocument51 pagesEE331 - L09 - Signals & Systemsahmetyasinbulut99No ratings yet
- LAB No. 10 Analysis of Linear Control System Using Root Loci TechniqueDocument7 pagesLAB No. 10 Analysis of Linear Control System Using Root Loci TechniqueSanjar BeyNo ratings yet
- Tnote 2Document3 pagesTnote 2trinhthanglongNo ratings yet
- Rising Edge Detector, Debounce CKT, Testing CKT For ThatDocument10 pagesRising Edge Detector, Debounce CKT, Testing CKT For ThataminhardNo ratings yet
- Probabilistic Robotics: FastslamDocument62 pagesProbabilistic Robotics: FastslamRogers SureNo ratings yet
- Simulation of Satellites and Constellations For The Assessment of Collision Avoidance OperationsDocument16 pagesSimulation of Satellites and Constellations For The Assessment of Collision Avoidance OperationsFrancisco CarvalhoNo ratings yet
- Orbit Determination Accuracy RequirementDocument16 pagesOrbit Determination Accuracy RequirementFrancisco CarvalhoNo ratings yet
- Learning Combinatorial Information From Permutations of LandmarksDocument29 pagesLearning Combinatorial Information From Permutations of LandmarksSteve LaValleNo ratings yet
- Engineering20101000008 49311378 PDFDocument7 pagesEngineering20101000008 49311378 PDFBogdan VasileNo ratings yet
- Consistency of The EKF-SLAM Algorithm: Tim Bailey, Juan Nieto, Jose Guivant, Michael Stevens and Eduardo NebotDocument7 pagesConsistency of The EKF-SLAM Algorithm: Tim Bailey, Juan Nieto, Jose Guivant, Michael Stevens and Eduardo NebotHBNo ratings yet
- ROS Based Autonomous Mobile Manipulator Robot: Abstract. This Paper Presents The Implementation of An Autonomous MobileDocument10 pagesROS Based Autonomous Mobile Manipulator Robot: Abstract. This Paper Presents The Implementation of An Autonomous Mobileducccu12No ratings yet
- Real-Time Vehicles Tracking Based On Kalman Filter in An ITSDocument7 pagesReal-Time Vehicles Tracking Based On Kalman Filter in An ITSNatalitza GolbanNo ratings yet
- Signal Processing Method For Distributed SAR Imaging ImprovementDocument4 pagesSignal Processing Method For Distributed SAR Imaging ImprovementJuan Manuel MauroNo ratings yet
- Chapter 3 Part 1Document33 pagesChapter 3 Part 1NURQAMARINANo ratings yet
- Implementation of Informed RRT - On A Pre-Mapped Octomap Generated by RTAB MapDocument9 pagesImplementation of Informed RRT - On A Pre-Mapped Octomap Generated by RTAB MapMuhammad AdhipatiunusNo ratings yet
- An Efficient Ceiling View SLAM Using Relational Constraints Between LandmarksDocument11 pagesAn Efficient Ceiling View SLAM Using Relational Constraints Between LandmarksAurel GSNo ratings yet
- Digital Control Part 2Document18 pagesDigital Control Part 2Zhraa NorNo ratings yet
- Modeling & Simulation of Spherical Robot Configuration Using Solidworks & MatlabDocument3 pagesModeling & Simulation of Spherical Robot Configuration Using Solidworks & Matlabkarthi0% (1)
- Introduction To Robot MappingDocument45 pagesIntroduction To Robot MappingRobertsen Putra SugiantoNo ratings yet
- A SLAM Overview From A Users PerspectiveDocument9 pagesA SLAM Overview From A Users PerspectiveKaushik BhowmikNo ratings yet
- inSAR Processing For DEM Generation PDFDocument8 pagesinSAR Processing For DEM Generation PDFJohn GkanatsiosNo ratings yet
- Ismaiel2021 1Document8 pagesIsmaiel2021 1Nguyen Phan LamNo ratings yet
- Institut Franco-Allemand de Recherches de Saint-Louis, BP 34, 68301 Saint-Louis - FranceDocument11 pagesInstitut Franco-Allemand de Recherches de Saint-Louis, BP 34, 68301 Saint-Louis - Franceali_raza117No ratings yet
- Lec16 PDFDocument14 pagesLec16 PDFNasrullah YusupNo ratings yet
- Lecture17 PDFDocument19 pagesLecture17 PDFAriesFranandaPanjaitanNo ratings yet
- 09o6 Refraction Seismic Final TopicsDocument44 pages09o6 Refraction Seismic Final TopicsyaredNo ratings yet
- Linear Control Systems (EE-3052) : Lecture-12 Introduction To Root LocusDocument25 pagesLinear Control Systems (EE-3052) : Lecture-12 Introduction To Root Locususama asifNo ratings yet
- Control Exp 8 Student ManualDocument7 pagesControl Exp 8 Student ManualSyed Nahid Ahmed TopuNo ratings yet
- Classical Missile Autopilot DesignDocument19 pagesClassical Missile Autopilot Designapi-19917230100% (2)
- Gamma-SLAM: Stereo Visual SLAM in Unstructured Environments Using Variance Grid MapsDocument6 pagesGamma-SLAM: Stereo Visual SLAM in Unstructured Environments Using Variance Grid MapswycdNo ratings yet
- A New Fast Initial Alignment For The HelicopterDocument7 pagesA New Fast Initial Alignment For The HelicopterHuneza AtaNo ratings yet
- Universidade Estadual de Campinas: Atividade III: Localiza C Ao - EKF Extende Kalman FilterDocument6 pagesUniversidade Estadual de Campinas: Atividade III: Localiza C Ao - EKF Extende Kalman FilterJulio Enrique FajardoNo ratings yet
- Satellite ControlDocument9 pagesSatellite ControlSingAnnNo ratings yet
- IC6701 May 18 With KeyDocument14 pagesIC6701 May 18 With KeyAnonymous yO7rcec6vuNo ratings yet
- Multi-Satellite Missions: February, 2019Document41 pagesMulti-Satellite Missions: February, 2019Alexander HarlanNo ratings yet
- Liu 2019Document4 pagesLiu 20195082 SAKTHIVELNo ratings yet
- Realtime Autonomous Navigation in V-Rep Based Static and Dynamic Environment Using EKF-SLAMDocument12 pagesRealtime Autonomous Navigation in V-Rep Based Static and Dynamic Environment Using EKF-SLAMIAES International Journal of Robotics and AutomationNo ratings yet
- Speed Control of A DC Motor With Variable Load Using Sliding Mode ControlDocument8 pagesSpeed Control of A DC Motor With Variable Load Using Sliding Mode ControlTớThíchThienvanHocNo ratings yet
- Fibra OpticDocument39 pagesFibra OpticCristhian Aparcana RomanNo ratings yet
- LSD-SLAM: Large-Scale Direct Monocular SLAMDocument16 pagesLSD-SLAM: Large-Scale Direct Monocular SLAMRamprasadNo ratings yet
- Performance Analysis of Space Suirvellance and Tracking Systems in LEODocument10 pagesPerformance Analysis of Space Suirvellance and Tracking Systems in LEOFrancisco CarvalhoNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- The Map Is Not The TerritoryDocument10 pagesThe Map Is Not The Territorytatarasi89100% (1)
- Huch 5th YearDocument37 pagesHuch 5th YearDanielle MartinezNo ratings yet
- Important Question in VectorDocument7 pagesImportant Question in VectorBhakti Nath MishraNo ratings yet
- Inno2018 - EMT2502 - VIBRATIONS - Damped MDOF PDFDocument5 pagesInno2018 - EMT2502 - VIBRATIONS - Damped MDOF PDFinnoodiraNo ratings yet
- Design of Steel Structures.11-20Document10 pagesDesign of Steel Structures.11-20nazir aliNo ratings yet
- Challenges To Modelling Heave in Expansive Soils: Hung Q. Vu and Delwyn G. FredlundDocument24 pagesChallenges To Modelling Heave in Expansive Soils: Hung Q. Vu and Delwyn G. FredlundanalysethatNo ratings yet
- Energie of Helium LikeDocument10 pagesEnergie of Helium LikeYant HArdy WaeNo ratings yet
- General Methods of Structure ElucidationDocument8 pagesGeneral Methods of Structure ElucidationSajanMaharjanNo ratings yet
- FRIM Centrifugal CleanersDocument12 pagesFRIM Centrifugal CleanersKristin WeberNo ratings yet
- 9701 s05 Ms 2Document7 pages9701 s05 Ms 2Hubbak KhanNo ratings yet
- Generator ProtectionDocument62 pagesGenerator ProtectionMohammad Ibnul Hossain100% (5)
- Investigate The Dependence, of The AngleDocument17 pagesInvestigate The Dependence, of The Angleselena leeNo ratings yet
- CFD Analysis of A 2-D Lid Driven Cavity Flow: Anirban Guha April 28, 2009Document10 pagesCFD Analysis of A 2-D Lid Driven Cavity Flow: Anirban Guha April 28, 2009Anirban GuhaNo ratings yet
- Sai New RegenerativeDocument20 pagesSai New RegenerativeMahesh ANo ratings yet
- Ohm'S Law and Its Derivation: V Ir V-Voltage I-Current R-ResistanceDocument9 pagesOhm'S Law and Its Derivation: V Ir V-Voltage I-Current R-ResistancemanuNo ratings yet
- Circular Motion Test I 08-08-2021Document10 pagesCircular Motion Test I 08-08-2021Suchay SawardekarNo ratings yet
- Vk5abn Ale AntennaDocument4 pagesVk5abn Ale AntennaTristan GlenNo ratings yet
- GATE Chemical Engineering 2015Document18 pagesGATE Chemical Engineering 2015Sabareesh Chandra ShekarNo ratings yet
- Permanent Magnet GuidelineDocument32 pagesPermanent Magnet GuidelineJaime FalaganNo ratings yet
- Queen'S College Form 3 - August 2022 Pre - Test To Final Exam Tutor: Fidel Dasilva Total: 100 MarksDocument7 pagesQueen'S College Form 3 - August 2022 Pre - Test To Final Exam Tutor: Fidel Dasilva Total: 100 MarksFidel DaSilvaNo ratings yet
- Tool Wear and Tool Life PDFDocument8 pagesTool Wear and Tool Life PDFBasarabeanuNo ratings yet
- Kinema TicsDocument61 pagesKinema TicsApex Institute33% (6)
- Discovery of Gamma-Rays: Electromagnetic SpectrumDocument3 pagesDiscovery of Gamma-Rays: Electromagnetic SpectrumJOHN K KOCHUMMENNo ratings yet
- Electrostatics 1Document11 pagesElectrostatics 1pratyushkarn100% (1)
- Assignment Part 2Document3 pagesAssignment Part 2SURESH BABU M PhyNo ratings yet
- UPCET 2021 SyllabusDocument21 pagesUPCET 2021 SyllabusUuu VhhNo ratings yet
- Displacement MethodDocument16 pagesDisplacement MethodnunpluggedNo ratings yet
- Chapter 3 - Fall2015 PDFDocument41 pagesChapter 3 - Fall2015 PDFPhạm Ngọc ThạchNo ratings yet