You might also like
- ARM Assembly Language Programming IntroductionDocument34 pagesARM Assembly Language Programming IntroductionWeehao Siow100% (1)
- CS 271 Computer Architecture and Assembly Language Final ExamDocument9 pagesCS 271 Computer Architecture and Assembly Language Final ExamBobby CraftNo ratings yet
- DLD Lab#01Document6 pagesDLD Lab#01Zoya KhanNo ratings yet
- Computer Architecture and Assembly Language Programming - CS401 Fall 2009 Assignment 02 SolutionDocument1 pageComputer Architecture and Assembly Language Programming - CS401 Fall 2009 Assignment 02 SolutionV XangeNo ratings yet
- So Sanh 8086 Va ARMDocument2 pagesSo Sanh 8086 Va ARMDuy Hùng NguyễnNo ratings yet
- Instruction Pointer, Registers, Addressing Modes, AssemblersDocument3 pagesInstruction Pointer, Registers, Addressing Modes, AssemblersMutiullahJamil0% (2)
- Laboratory Exercise 11: Implementing Algorithms in HardwareDocument3 pagesLaboratory Exercise 11: Implementing Algorithms in HardwareTuân PhạmNo ratings yet
- 8086 Microprocessor RajDocument86 pages8086 Microprocessor RajVenkata Rajkumar ChNo ratings yet
- Static Huffman Coding Term PaperDocument23 pagesStatic Huffman Coding Term PaperRavish NirvanNo ratings yet
- Introduction To MicroprocessorsDocument4 pagesIntroduction To MicroprocessorsNaga Chaitanya ChilukaNo ratings yet
- 8086 ManualDocument79 pages8086 ManualHari Ram KNo ratings yet
- 8086 MicroprocessorDocument21 pages8086 MicroprocessorPinki KumariNo ratings yet
- Instruction Set 8085Document19 pagesInstruction Set 8085internetwealthdonNo ratings yet
- Microprocessors 8086 (Notes)Document29 pagesMicroprocessors 8086 (Notes)Aravindha BhatNo ratings yet
- So Sanh 8086 Va ARMDocument2 pagesSo Sanh 8086 Va ARMDuy Hùng NguyễnNo ratings yet
- Laboratory Exercise 3: Discrete-Time Signals: Frequency-Domain RepresentationsDocument18 pagesLaboratory Exercise 3: Discrete-Time Signals: Frequency-Domain RepresentationsNguyễn HưngNo ratings yet
- 8086 MICROPROCESSOR REGISTERS AND ADDRESSINGDocument89 pages8086 MICROPROCESSOR REGISTERS AND ADDRESSINGBharathi MolletiNo ratings yet
- Sample Exam QuestionsDocument9 pagesSample Exam Questionssomeguyinoz100% (1)
- Chapter-5: Assembly Language Programming Using 8086 (16 Marks)Document55 pagesChapter-5: Assembly Language Programming Using 8086 (16 Marks)PRABHAKAR MORENo ratings yet
- Sic XEDocument17 pagesSic XEinvincible_shalin6954No ratings yet
- Assembler Language - 8051powerpoint PresentationDocument56 pagesAssembler Language - 8051powerpoint PresentationtauseeeeeeeeNo ratings yet
- Final 222 2009 SolDocument6 pagesFinal 222 2009 SolNapsterNo ratings yet
- Quiz05 CEADocument4 pagesQuiz05 CEANguyễn Huy100% (1)
- Evolution of MicroProcessorDocument28 pagesEvolution of MicroProcessorRafat Touqir RafsunNo ratings yet
- 8,16,32 Floating Point Processing in ARMDocument25 pages8,16,32 Floating Point Processing in ARMOMKAR BHILARE100% (1)
- 5- CH 5 Arithmetic and Logic Instructions - ١٢٢٠١٩Document44 pages5- CH 5 Arithmetic and Logic Instructions - ١٢٢٠١٩Boy azNo ratings yet
- Microprocessor and Architecture Solution PDFDocument23 pagesMicroprocessor and Architecture Solution PDFKarmaveer Bhaurao Patil CollegeNo ratings yet
- Huffman Encoder and Decoder Using VerilogDocument3 pagesHuffman Encoder and Decoder Using VerilogInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Systems Software QuestionDocument82 pagesSystems Software QuestionkhalidNo ratings yet
- CS255: Encrypt Message for Multiple RecipientsDocument9 pagesCS255: Encrypt Message for Multiple RecipientsVinayak ChachraNo ratings yet
- 8051 CH9 950217Document103 pages8051 CH9 950217Amardeep PotdarNo ratings yet
- TC 300 Uc InglesDocument62 pagesTC 300 Uc InglesTamo Activo MusicNo ratings yet
- Instruction Set 1 Rev.Document54 pagesInstruction Set 1 Rev.msantoshkkdNo ratings yet
- 4 Bit Cpu ReportDocument16 pages4 Bit Cpu ReportHarshil LodhiNo ratings yet
- Digital Logic Basics: 2-1 Implementation Using NAND Gates: We Can Write The XOR Logical Expression ADocument19 pagesDigital Logic Basics: 2-1 Implementation Using NAND Gates: We Can Write The XOR Logical Expression AKavya ChoudharyNo ratings yet
- Block Diagram of Intel 8086Document5 pagesBlock Diagram of Intel 8086Ritesh SinghNo ratings yet
- CSE331L - Introduction to Assembly LanguageDocument7 pagesCSE331L - Introduction to Assembly LanguageTanjila Islam Ritu 1811017642No ratings yet
- Register, Bus and Memory Transfer-5Document17 pagesRegister, Bus and Memory Transfer-5Dinesh KumarNo ratings yet
- Assembly Language - A Low-Level Programming LanguageDocument67 pagesAssembly Language - A Low-Level Programming LanguageprithiksNo ratings yet
- Internal Architecture 8086Document3 pagesInternal Architecture 8086firoz83% (6)
- Part III 8051 General PgmsDocument7 pagesPart III 8051 General PgmsHEMANo ratings yet
- x86 Intrinsics Cheat Sheet: Jan Finis Finis@in - Tum.deDocument1 pagex86 Intrinsics Cheat Sheet: Jan Finis Finis@in - Tum.deverthex20992828100% (1)
- Question Bank - 150504 - Session - 19 - 20Document14 pagesQuestion Bank - 150504 - Session - 19 - 20Aashutosh TiwariNo ratings yet
- Tiger SHARC ProcessorDocument36 pagesTiger SHARC ProcessorChintan PatelNo ratings yet
- Application For Emu8086 and Proteus in Microcomputer Principle TeachingDocument4 pagesApplication For Emu8086 and Proteus in Microcomputer Principle Teachingwow try100% (1)
- Chapter 7 - Basic Processing UnitDocument47 pagesChapter 7 - Basic Processing UnitMayur Patankar0% (1)
- Microprocessor and InterfacingDocument25 pagesMicroprocessor and InterfacingEr Bhavik PatelNo ratings yet
- Lecture05 - 8086 AssemblyDocument43 pagesLecture05 - 8086 Assemblytesfu zewduNo ratings yet
- Interfacing ADC With 8051Document15 pagesInterfacing ADC With 8051Pavan Kumar N100% (1)
- Evaluation of Microprocessor PDFDocument2 pagesEvaluation of Microprocessor PDFJennifer100% (1)
- System Software NotesDocument97 pagesSystem Software NotesTheerthesh Gowda100% (1)
- Sic and Sicex CompareDocument3 pagesSic and Sicex ComparevishalNo ratings yet
- Coa ProgramsDocument10 pagesCoa Programsshaista firdouseNo ratings yet
- Basic Computer OrganizationDocument20 pagesBasic Computer OrganizationMag Creation100% (1)
- 8051 PPT For MSCDocument138 pages8051 PPT For MSCvikash sharmaNo ratings yet
- ÔN TẬP CUỐI MÔN OSDocument16 pagesÔN TẬP CUỐI MÔN OSNguyễn Bảo HưngNo ratings yet
- Arm Program ModelDocument4 pagesArm Program ModelvlkumashankardeekshithNo ratings yet
- Unit-I - : School of Electrical & Electronics Engineering Department of Electronics & InstrumentationDocument190 pagesUnit-I - : School of Electrical & Electronics Engineering Department of Electronics & Instrumentation0901IO201015 ANKIT PATELNo ratings yet
- Arm NotesDocument22 pagesArm NotesShreya SatheeshNo ratings yet
- Verbal English Day-To-Day Activity Blue PrintDocument28 pagesVerbal English Day-To-Day Activity Blue PrintVikas SinghNo ratings yet
- Refer Image AssessmentDocument2 pagesRefer Image AssessmentVikas SinghNo ratings yet
- Verbal English Day-To-Day Activity Blue Print-3Document47 pagesVerbal English Day-To-Day Activity Blue Print-3Vikas SinghNo ratings yet
- Verbal English Day-To-Day Activity Blue Print-2Document43 pagesVerbal English Day-To-Day Activity Blue Print-2Vikas SinghNo ratings yet
- Verbal English Day-To-Day Activity Blue Print-4Document49 pagesVerbal English Day-To-Day Activity Blue Print-4Vikas SinghNo ratings yet
- The Last Session: A Journey of Growth and OpportunityDocument29 pagesThe Last Session: A Journey of Growth and OpportunityVikas SinghNo ratings yet
- Vikash Clinic InvoiceDocument1 pageVikash Clinic InvoiceVikas SinghNo ratings yet
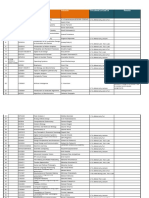
- S.No. Section Course Code Course Name Instructor TA To Attend Lect/Lab/Tut RemarksDocument5 pagesS.No. Section Course Code Course Name Instructor TA To Attend Lect/Lab/Tut RemarksVikas SinghNo ratings yet
- Schedule of CCMT-2020 Regular RoundsDocument1 pageSchedule of CCMT-2020 Regular RoundsVikas SinghNo ratings yet
- S.No. Section Course Code Course Name Instructor TA To Attend Lect/Lab/Tut RemarksDocument5 pagesS.No. Section Course Code Course Name Instructor TA To Attend Lect/Lab/Tut RemarksVikas SinghNo ratings yet
- Government Polytechnic College Seminar Report on RedTactonDocument39 pagesGovernment Polytechnic College Seminar Report on RedTactonBindu PranithNo ratings yet
- Microstrip Patch Antenna: A Survey of Feeding Techniques and DesignsDocument4 pagesMicrostrip Patch Antenna: A Survey of Feeding Techniques and DesignsVikas SinghNo ratings yet
- 22m Fast Patrol Craft Features & SpecsDocument1 page22m Fast Patrol Craft Features & SpecsNico BossiNo ratings yet
- Texto en inglesDocument5 pagesTexto en inglesJesus Andres Lopez YañezNo ratings yet
- RD218 Gardan 3110 Ob2226657 NDocument1 pageRD218 Gardan 3110 Ob2226657 Nopen hartigNo ratings yet
- HTML MCQDocument22 pagesHTML MCQBuxar Students LifeNo ratings yet
- Audit Chapter 7Document5 pagesAudit Chapter 7Addi Såïñt George100% (2)
- Chen2019 PDFDocument5 pagesChen2019 PDFPriya VeerNo ratings yet
- Quiz - Limits and ContinuityDocument3 pagesQuiz - Limits and ContinuityAdamNo ratings yet
- Robert K Boscarato and Matthew Skaggs Corprate Credit Book Draft 1.Document70 pagesRobert K Boscarato and Matthew Skaggs Corprate Credit Book Draft 1.Robert BoscaratoNo ratings yet
- Williamstown Cannabis Cultivation PlanDocument48 pagesWilliamstown Cannabis Cultivation PlanOltion JaupajNo ratings yet
- The 9 Building Blocks of Business ModelsDocument3 pagesThe 9 Building Blocks of Business ModelsTobeFrankNo ratings yet
- Effects of UrbanizationDocument17 pagesEffects of UrbanizationAriel EstigoyNo ratings yet
- Arpèges de Trois Notes: Arpeggios in TripletsDocument3 pagesArpèges de Trois Notes: Arpeggios in TripletspanapapakNo ratings yet
- BITS ZG628T Dissertation (For Students of M. Tech. Software Systems)Document21 pagesBITS ZG628T Dissertation (For Students of M. Tech. Software Systems)Shiva Beduduri100% (1)
- Mercedes Vario 1996 2003 PDF Service ManualDocument22 pagesMercedes Vario 1996 2003 PDF Service Manualveronicamurphy070288aqwNo ratings yet
- Frogkisser! by Garth Nix (Excerpt)Document17 pagesFrogkisser! by Garth Nix (Excerpt)I Read YA0% (1)
- Particle Physics Brick by Brick - Atomic and Subatomic Physics Explained... in LEGO - Dr. Ben Still (Firefly Books 2018 9781844039340 Eng)Document177 pagesParticle Physics Brick by Brick - Atomic and Subatomic Physics Explained... in LEGO - Dr. Ben Still (Firefly Books 2018 9781844039340 Eng)KonstantineNo ratings yet
- AP Poetry TermsDocument8 pagesAP Poetry TermsTEACHER BARAY LLCE ANGLAISNo ratings yet
- ATI, West Bengal: ATI Training Management Information SystemDocument11 pagesATI, West Bengal: ATI Training Management Information SystemNarayanaNo ratings yet
- CSE 323-Final-Summer 2021Document2 pagesCSE 323-Final-Summer 2021nahimur rahmanNo ratings yet
- EEE111_Multisim_ManualDocument14 pagesEEE111_Multisim_ManualSHADOW manNo ratings yet
- Repport Btech FinalDocument49 pagesRepport Btech FinalSuzelle NGOUNOU MAGANo ratings yet
- Lifeboat Equipment ListDocument1 pageLifeboat Equipment Listjosua albertNo ratings yet
- (Food Engineering Series) Gustavo V Barbosa-Cánovas - Humberto Vega-Mercado - Dehydration of Foods PDFDocument339 pages(Food Engineering Series) Gustavo V Barbosa-Cánovas - Humberto Vega-Mercado - Dehydration of Foods PDFLis FernandesNo ratings yet
- Structurix MEcoDocument12 pagesStructurix MEcoPierpaolo AparoNo ratings yet
- Valuation of Mineral Resources in Selected FinanciDocument12 pagesValuation of Mineral Resources in Selected FinanciBill LiNo ratings yet
- ALGEBRA Groups 1Document34 pagesALGEBRA Groups 1bravemacnyNo ratings yet
- Diagnosing and Managing Acute and Chronic SinusitisDocument14 pagesDiagnosing and Managing Acute and Chronic SinusitisAnonymous y3TIOwX8100% (1)
- Som-Ii Uqb 2019-20Document23 pagesSom-Ii Uqb 2019-20VENKATESH METHRINo ratings yet
- BISE Sukkur HSC Part 2 Results 2015Document12 pagesBISE Sukkur HSC Part 2 Results 2015ajayNo ratings yet
- Roof Beam Layout - r1Document1 pageRoof Beam Layout - r1Niraj ShindeNo ratings yet