You might also like
- Real-Time Systems: Frank DrewsDocument30 pagesReal-Time Systems: Frank DrewsJuan Jose MachadoNo ratings yet
- EcCST ManualDocument62 pagesEcCST Manualmatius.qNo ratings yet
- Real-Time Embedded OSDocument34 pagesReal-Time Embedded OSFandik ArmansyahNo ratings yet
- ROBOTICS PRACTICAL FILE AURDINO 7 TinkercadDocument18 pagesROBOTICS PRACTICAL FILE AURDINO 7 TinkercadJp SinghNo ratings yet
- New IC PaperDocument150 pagesNew IC PaperRaja Ramesh DNo ratings yet
- ADP I Lab Manual FinalDocument52 pagesADP I Lab Manual Finalसंकेत कलगुटकरNo ratings yet
- A Survey On Future Generation Wireless Communications-6G: Requirements, Technologies, Challenges and ApplicationsDocument10 pagesA Survey On Future Generation Wireless Communications-6G: Requirements, Technologies, Challenges and ApplicationsWARSE JournalsNo ratings yet
- GIFIDocument16 pagesGIFIcool_397103608No ratings yet
- 2016lab2 Guide A1-2 eDocument27 pages2016lab2 Guide A1-2 eSarah CosentinoNo ratings yet
- Robotics Programs PDFDocument19 pagesRobotics Programs PDFLata SinhaNo ratings yet
- World University Rankings 2021 methodology overviewDocument16 pagesWorld University Rankings 2021 methodology overviewMrQmonkNo ratings yet
- Digital Signal Processing Question and AnswersDocument4 pagesDigital Signal Processing Question and AnswersShikharTyagiNo ratings yet
- Space Junk PosterDocument9 pagesSpace Junk Postermeeravali_7No ratings yet
- ROBOTICS Lab ManualDocument7 pagesROBOTICS Lab Manualparidhi kaushikNo ratings yet
- Metamaterial Inspired AntennaDocument10 pagesMetamaterial Inspired AntennaUmar KhanNo ratings yet
- Classifying Cisco SwitchesDocument15 pagesClassifying Cisco SwitchessagarkrisshNo ratings yet
- Cisco Packet Tracer 6.0.1 Overview PresentationDocument37 pagesCisco Packet Tracer 6.0.1 Overview PresentationIzzat FauziNo ratings yet
- Introduction To Drone Technology SlidesDocument15 pagesIntroduction To Drone Technology SlidesLeadingEdge FTNo ratings yet
- Seminar Project PPT (Project Loon)Document25 pagesSeminar Project PPT (Project Loon)anjaliNo ratings yet
- CHAPTER1 Signals and SpectraDocument38 pagesCHAPTER1 Signals and SpectraGita Eka RamadhaNo ratings yet
- On Web of ScienceDocument21 pagesOn Web of ScienceShesh DhurandharNo ratings yet
- RMD Sinhagad School of Engineering: Unit: 01 ES Overview (MCQ)Document4 pagesRMD Sinhagad School of Engineering: Unit: 01 ES Overview (MCQ)Spiderspider2021No ratings yet
- Introduction to UML: Modeling Language for Software SystemsDocument208 pagesIntroduction to UML: Modeling Language for Software SystemsRaj VermaNo ratings yet
- Getting StartedDocument46 pagesGetting StartedThenappan SNo ratings yet
- Robotics Practical FileDocument131 pagesRobotics Practical FileRAMAKANT RANANo ratings yet
- Introduction To Real-Time Operating SystemDocument28 pagesIntroduction To Real-Time Operating SystemAbhishek Basava0% (1)
- 2.embedded Operating SystemDocument31 pages2.embedded Operating Systemtamnguyen29842764No ratings yet
- Adaptive Signal ProcessingDocument24 pagesAdaptive Signal Processinganilshaw27No ratings yet
- 5 Operating SystemsDocument23 pages5 Operating SystemsPoorna ChelvanNo ratings yet
- Introduction To Robotics PDFDocument16 pagesIntroduction To Robotics PDFvegamasterinNo ratings yet
- MIMO-OFDM Techniques for Wireless CommunicationsDocument18 pagesMIMO-OFDM Techniques for Wireless CommunicationsDishant KhoslaNo ratings yet
- Submitted by 19Blc1137 - Saksham Mishra Submitted To Dr. Manoj Kumar RajagopalDocument16 pagesSubmitted by 19Blc1137 - Saksham Mishra Submitted To Dr. Manoj Kumar RajagopalSaksham MishraNo ratings yet
- EMBEDDED PPTDocument23 pagesEMBEDDED PPTArun Kumar MANo ratings yet
- Classification Using Deep Learning NetworksDocument27 pagesClassification Using Deep Learning NetworksWaheed NangigaddaNo ratings yet
- Presentation On RTOSDocument15 pagesPresentation On RTOSpriyankagulhane100% (1)
- Embedded SystemsDocument178 pagesEmbedded SystemsPranjal Verma100% (1)
- Unit 1 IOTDocument125 pagesUnit 1 IOTnagamalleswari2010No ratings yet
- Ind4 0Document75 pagesInd4 0HibaNo ratings yet
- 354 33 Powerpoint-Slides CH9Document44 pages354 33 Powerpoint-Slides CH9Saravanan JayabalanNo ratings yet
- IprpatentDocument13 pagesIprpatentMy Phone YouNo ratings yet
- Introduction To Pic MicrocontrollerDocument16 pagesIntroduction To Pic MicrocontrollernothingtohideNo ratings yet
- Unit2 IotDocument89 pagesUnit2 IotBulbul Sharma100% (1)
- Unit 1 Introduction To Embedded System Design PDFDocument99 pagesUnit 1 Introduction To Embedded System Design PDFNIDHI. R .SINGH100% (1)
- Robotics PPT 1Document16 pagesRobotics PPT 1Himanshu VermaNo ratings yet
- CH 1Document108 pagesCH 1Janhavi VishwanathNo ratings yet
- IoT traffic controlDocument9 pagesIoT traffic controlDesta Yakob Doda 18BML0121No ratings yet
- Course Overview and 8051 Architecture Rv01Document22 pagesCourse Overview and 8051 Architecture Rv01saidarao2012No ratings yet
- Object Detection Using Convolution Al Neural NetworksDocument6 pagesObject Detection Using Convolution Al Neural NetworksAnita JaiswalNo ratings yet
- Communication InterfaceDocument10 pagesCommunication InterfaceHarini MNo ratings yet
- Online Product QuantizationDocument18 pagesOnline Product QuantizationsatyaNo ratings yet
- Arduino Obstacle Avoiding RobotDocument5 pagesArduino Obstacle Avoiding RobotWalt WhimpennyNo ratings yet
- Unit 4Document47 pagesUnit 4A21126512117 SUKALA ABHIRAMNo ratings yet
- Research and Latest Trends in Mobile ComputingDocument50 pagesResearch and Latest Trends in Mobile ComputingDurgaprasad MadamsettyNo ratings yet
- Nu-Smart Shopping CartDocument14 pagesNu-Smart Shopping CartchaitanyaNo ratings yet
- MATLAB ExperimentsDocument16 pagesMATLAB Experimentsishan varshneyNo ratings yet
- Hardware-Software Codesign: Trong-Yen LeeDocument33 pagesHardware-Software Codesign: Trong-Yen LeePoonthalirNo ratings yet
- FinalDocument178 pagesFinalBiki JhaNo ratings yet
- Real-Time Systems: Frank DrewsDocument30 pagesReal-Time Systems: Frank DrewsShresth KumarNo ratings yet
- Chapter 1 - The Hardware Side - Part 1. An IntroductionDocument69 pagesChapter 1 - The Hardware Side - Part 1. An Introductionprabakaran.rNo ratings yet
- Unit-2 Case Study Embedded System For Automatic Washing MachineDocument11 pagesUnit-2 Case Study Embedded System For Automatic Washing Machinesujith84% (19)
- Embedded System-Sp PDFDocument35 pagesEmbedded System-Sp PDFNivethaaNo ratings yet
- Chapter 9Document72 pagesChapter 9prabakaran.rNo ratings yet
- Chapter 9Document72 pagesChapter 9prabakaran.rNo ratings yet
- Lpc2148 DatasheetDocument38 pagesLpc2148 DatasheetSandeep ThompsonNo ratings yet
- FireBird V Hardware Manual V1.08 2012-10-12Document121 pagesFireBird V Hardware Manual V1.08 2012-10-12Oshin Sharel BrittoNo ratings yet
- Lpc2148 DatasheetDocument38 pagesLpc2148 DatasheetSandeep ThompsonNo ratings yet
- P 89 V 51 RD 2Document75 pagesP 89 V 51 RD 2ckprvn100% (2)
- A New Way of Estimating Compute Boundedness and Its Application To Dynamic Voltage ScalingDocument14 pagesA New Way of Estimating Compute Boundedness and Its Application To Dynamic Voltage Scalingprabakaran.rNo ratings yet
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Microcontrollers and Introduction To Real-Time ProgrammingDocument41 pagesMicrocontrollers and Introduction To Real-Time Programmingprabakaran.rNo ratings yet
- Catálogo EIXO ZFDocument27 pagesCatálogo EIXO ZFOdirley JonesNo ratings yet
- Convergys X3: 3-Part WBC Differential Hematology AnalyzerDocument2 pagesConvergys X3: 3-Part WBC Differential Hematology AnalyzerPhong Nguyễn Windy100% (1)
- Kit de CommunicationDocument3 pagesKit de CommunicationdupontNo ratings yet
- Test 1Document6 pagesTest 1AKASH PALNo ratings yet
- Assigned Questions ListDocument4 pagesAssigned Questions ListDeepam AsnaniNo ratings yet
- FAQ 690p Flash FirmwareDocument1 pageFAQ 690p Flash FirmwareRicardo Pimenta de CarvalhoNo ratings yet
- Power System Protection Lab: Department of Electrical EngineeringDocument33 pagesPower System Protection Lab: Department of Electrical EngineeringBharat Kumar PrajapatiNo ratings yet
- SAP Baseline Security Audit: Essential Technical ControlsDocument5 pagesSAP Baseline Security Audit: Essential Technical ControlsRanjeet SinghNo ratings yet
- Combined Assignment For Supply Chain Operations ManagementDocument22 pagesCombined Assignment For Supply Chain Operations ManagementAbood Thekrallah100% (2)
- A General Contingency Theory of ManagementDocument16 pagesA General Contingency Theory of ManagementlucasNo ratings yet
- Qualis VHDL-QuickReferenceCard V2.1 PDFDocument2 pagesQualis VHDL-QuickReferenceCard V2.1 PDFlakithaNo ratings yet
- Gazette On Minimum Wages RMG (Bangladesh) - 2018 - (English)Document11 pagesGazette On Minimum Wages RMG (Bangladesh) - 2018 - (English)Mazharul IslamNo ratings yet
- Algebra Terms and DefinitionsDocument6 pagesAlgebra Terms and DefinitionssNo ratings yet
- FCA Nozzle Non-Slam Check Valve CatalogueDocument16 pagesFCA Nozzle Non-Slam Check Valve CataloguePatricio AcuñaNo ratings yet
- HOSHIZAKI SERVICE MANUAL Logic Board Settings E1ck-811 PDFDocument118 pagesHOSHIZAKI SERVICE MANUAL Logic Board Settings E1ck-811 PDFLeo50% (2)
- JVM ArchitectureDocument23 pagesJVM ArchitectureSaichand TNo ratings yet
- APCOB Recruitment for 35 Staff Assistant PostsDocument17 pagesAPCOB Recruitment for 35 Staff Assistant Postsgowthami ravinuthalaNo ratings yet
- UntitledDocument36 pagesUntitledPritam MondalNo ratings yet
- VIP Host - V29Document24 pagesVIP Host - V29hary amansah lubisNo ratings yet
- Power BI Vs Excel 1694801413Document1 pagePower BI Vs Excel 1694801413LifeNo ratings yet
- Tutorial Wirecut PDFDocument77 pagesTutorial Wirecut PDFmfitri83No ratings yet
- My Normal Family Walkthrough - Complete Guide to Achieve All GoalsDocument14 pagesMy Normal Family Walkthrough - Complete Guide to Achieve All Goalsroy5656No ratings yet
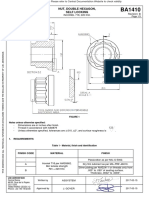
- Nut, Double Hexagon, Self Locking: Page 1/3Document3 pagesNut, Double Hexagon, Self Locking: Page 1/3Renato WatanabeNo ratings yet
- User Manual 4009600Document3 pagesUser Manual 4009600Ahmed ProlicNo ratings yet
- PartnerDocument14 pagesPartnerLeo van GorkumNo ratings yet
- 2) N5, N6 and N7 (NPS2 - 300#) PDFDocument20 pages2) N5, N6 and N7 (NPS2 - 300#) PDFpraffulNo ratings yet
- IIBM ProspectusDocument50 pagesIIBM ProspectuscubadesignstudNo ratings yet
- PLDT REFUND FORMDocument4 pagesPLDT REFUND FORMKitchenHacksNo ratings yet
- Chapter 1. Defining and Collecting Data Triệu Vi GửiDocument43 pagesChapter 1. Defining and Collecting Data Triệu Vi GửiDang Thuy Trang (K17 QN)No ratings yet
- How To Change Word Default Font in WPS Office WordDocument5 pagesHow To Change Word Default Font in WPS Office WordAkib ManzoorNo ratings yet