You might also like
- Detroit™ Transmissions Electronic Application and Installation ManualDocument80 pagesDetroit™ Transmissions Electronic Application and Installation ManualSonder B50% (2)
- Ultrashift DiagnosticsDocument518 pagesUltrashift Diagnosticscristian picado100% (1)
- Peterbilt Model 579 HVACDocument102 pagesPeterbilt Model 579 HVACgustavoqr2767% (3)
- Eaton Fuller Transmission Guide 2015Document40 pagesEaton Fuller Transmission Guide 2015ChristopherNo ratings yet
- Kenworth Medium Duty BBM Dec 2011Document179 pagesKenworth Medium Duty BBM Dec 2011Daemonarch Av100% (2)
- TRTS0950 En-Us August 2022 ADocument673 pagesTRTS0950 En-Us August 2022 AMarcos MartinezNo ratings yet
- Mack - All Engines (2010 Emissions) .Titan - 000Document12 pagesMack - All Engines (2010 Emissions) .Titan - 000Harlinton descalzi100% (2)
- ServiceManualNamux4English PDFDocument112 pagesServiceManualNamux4English PDFFernando Marin100% (7)
- Aftertreatment Diesel Exhaust Fluid (DEF) Pump Unit, ReplacementDocument8 pagesAftertreatment Diesel Exhaust Fluid (DEF) Pump Unit, Replacementhamilton amilcar miranda porrasNo ratings yet
- Fuller AutoshiftDocument480 pagesFuller AutoshiftAdal Vera67% (3)
- Paccar MX13 engine fault codesDocument29 pagesPaccar MX13 engine fault codesgustavoqr27100% (1)
- 05 SAM ChassisDocument26 pages05 SAM ChassisEbied Yousif AlyNo ratings yet
- Reading Wiring Diagrams Manual FALTA PASARDocument20 pagesReading Wiring Diagrams Manual FALTA PASARcheolll100% (4)
- Paccar 2010 Multiplexed Electrical System Sevice Manual P30 1011 PDFDocument104 pagesPaccar 2010 Multiplexed Electrical System Sevice Manual P30 1011 PDFJohanny Barrera Hurtado100% (2)
- Supplemental Manuals - Peterbilt Conventional Trucks Operator's Manual After 1-07 PDFDocument225 pagesSupplemental Manuals - Peterbilt Conventional Trucks Operator's Manual After 1-07 PDFLuis Reinaldo Ramirez ContrerasNo ratings yet
- Vecu 5.11 Programming Guide 2018Document190 pagesVecu 5.11 Programming Guide 2018harianaNo ratings yet
- Peterbilt Essentials Module5 Axles SuspensionsDocument20 pagesPeterbilt Essentials Module5 Axles Suspensionsnorth-piligrim100% (5)
- Esig - HX - ClusterDocument41 pagesEsig - HX - Clusterjose sierraNo ratings yet
- MX-13 Programming GuideDocument71 pagesMX-13 Programming GuideKristen Holmes83% (6)
- Understand OBD Systems for Heavy-Duty VehiclesDocument13 pagesUnderstand OBD Systems for Heavy-Duty VehiclesHerrera AnthonyNo ratings yet
- DDEC Series 60-KenworthDocument2 pagesDDEC Series 60-KenworthFabio Sierra100% (1)
- PACCAR MX Engine Reference Sheet PDFDocument2 pagesPACCAR MX Engine Reference Sheet PDFMalique ChamauneNo ratings yet
- 04-Datalink, Diagnostic CANDocument17 pages04-Datalink, Diagnostic CANEbied Yousif AlyNo ratings yet
- Paccar Multi-Plex 2010Document195 pagesPaccar Multi-Plex 2010Luis Tepezano100% (4)
- PaccarServiceManual2005 2010Document189 pagesPaccarServiceManual2005 2010Eric Porter100% (19)
- EPA 2010 Exhaust and Aftertreatment System Modification GuidelinesDocument30 pagesEPA 2010 Exhaust and Aftertreatment System Modification GuidelinesRodolfo Alberto Muñoz CarcamoNo ratings yet
- Installation of the Gear Train on a DD15 EngineDocument7 pagesInstallation of the Gear Train on a DD15 Enginefreddy100% (1)
- SK29863Document73 pagesSK29863gigo_dream100% (2)
- Eaton Ultrashift DM Heavy Duty Clutch Installation Guide Installation Instructions enDocument2 pagesEaton Ultrashift DM Heavy Duty Clutch Installation Guide Installation Instructions enSatooAtheiNo ratings yet
- 2021 Multiplex Electrical System Programming Guide 13 XDocument240 pages2021 Multiplex Electrical System Programming Guide 13 XRoxane SchoenmakersNo ratings yet
- DAVIE PeterbiltDocument103 pagesDAVIE PeterbiltCharly Ramos100% (1)
- Pressure Testing The Intake & Exhaust Sys at One TimeDocument2 pagesPressure Testing The Intake & Exhaust Sys at One Timejaime roblesNo ratings yet
- MAXXFORCE 11 & 13 ENGINES FEATURES, SPECS & REPAIR GUIDEDocument114 pagesMAXXFORCE 11 & 13 ENGINES FEATURES, SPECS & REPAIR GUIDEPhạm Nhất100% (1)
- GHG17 Heavy Duty Troubleshooting Manual (DDC-SVC-MAN-0191)Document17 pagesGHG17 Heavy Duty Troubleshooting Manual (DDC-SVC-MAN-0191)Octavio Hernandez RodriguezNo ratings yet
- New Cascadia Driver's Manual2 PDFDocument203 pagesNew Cascadia Driver's Manual2 PDFjesus silvaNo ratings yet
- Body Builders Guide PDFDocument216 pagesBody Builders Guide PDFvo phuongNo ratings yet
- Illustrated parts list for FRO-16210B transmissionDocument34 pagesIllustrated parts list for FRO-16210B transmissionnetemma97No ratings yet
- Peterbilt Body Builder Manuals - Peterbilt Heavy Duty Body Builder Manual PDFDocument146 pagesPeterbilt Body Builder Manuals - Peterbilt Heavy Duty Body Builder Manual PDFSatooAthei67% (6)
- Main Cab Harness ComponentsDocument10 pagesMain Cab Harness Componentsoctavio hernandezNo ratings yet
- PROSTAR Intro Study GuideDocument40 pagesPROSTAR Intro Study GuideLogan Wohlford100% (2)
- DAF PACCAR MX-13 Engines EN PDFDocument4 pagesDAF PACCAR MX-13 Engines EN PDFAbdo FreedomNo ratings yet
- System wiring diagrams for 1999 Freightliner Century Series C-120 air conditioningDocument63 pagesSystem wiring diagrams for 1999 Freightliner Century Series C-120 air conditioningEduardo Alvarez100% (1)
- Isx 15 Fuel System WorksDocument3 pagesIsx 15 Fuel System Workssidhu100% (2)
- Pv776 K Ved7 EngineDocument11 pagesPv776 K Ved7 EngineHamilton Miranda100% (3)
- 2 Ats 07Document12 pages2 Ats 07carlos maradiagaNo ratings yet
- P94 1830Document10 pagesP94 1830RobertoGomez100% (3)
- Haldex L30030W Trailer Service Manual PLC, PLC-PlusDocument99 pagesHaldex L30030W Trailer Service Manual PLC, PLC-Plusalexoflahertyhotmail.com100% (2)
- Maxxforce DT, 9, & 10: Engine Operation and Maintenance ManualDocument102 pagesMaxxforce DT, 9, & 10: Engine Operation and Maintenance ManualOswaldo Monge100% (1)
- Kenworth T680 Operator's ManualDocument403 pagesKenworth T680 Operator's ManualEbodio Guevara100% (1)
- 850-029 ISX, QSX Static Timing WedgeDocument6 pages850-029 ISX, QSX Static Timing WedgeDaniel OstapovichNo ratings yet
- 01Air-Elect Feb2015 PDFDocument27 pages01Air-Elect Feb2015 PDFjuan100% (1)
- DD Exhast Egr After Treat Ddc-Svc-Man-0083Document393 pagesDD Exhast Egr After Treat Ddc-Svc-Man-0083directorNo ratings yet
- 481 Kenworth Service ManualDocument28 pages481 Kenworth Service ManualUlises Ivan Noyola SotoNo ratings yet
- Diagnostic Sales Evening Component TestingDocument124 pagesDiagnostic Sales Evening Component TestingbibNo ratings yet
- Set 1 CTs and PTsDocument32 pagesSet 1 CTs and PTsRahamath Ali Mohammed AttarNo ratings yet
- LED Dimmer Circuit Using PWMDocument29 pagesLED Dimmer Circuit Using PWMpra_zara2637No ratings yet
- Elec FunDocument62 pagesElec FunYugalNo ratings yet
- Lecture 3 - ActuatorsDocument10 pagesLecture 3 - Actuatorsjyothi sriNo ratings yet
- QDB-2 Instructions For UseDocument17 pagesQDB-2 Instructions For UseCarlos Castillo100% (1)
- ECET411 Lecture 4 SCRs PDFDocument68 pagesECET411 Lecture 4 SCRs PDFJM GironellaNo ratings yet
- Diagramas de John Deere EcmDocument5 pagesDiagramas de John Deere Ecmjuansito0394% (18)
- Excelnt Book Diesel Fuel CATDocument64 pagesExcelnt Book Diesel Fuel CATEDWINNo ratings yet
- BUX37Document1 pageBUX37Eduardo ColinNo ratings yet
- Excelnt Book Diesel Fuel CATDocument64 pagesExcelnt Book Diesel Fuel CATEDWINNo ratings yet
- Chev - Optra.2008.fuel Pump RelayDocument1 pageChev - Optra.2008.fuel Pump RelayEduardo ColinNo ratings yet
- USB-Link™ Installation and Setup ManualDocument85 pagesUSB-Link™ Installation and Setup ManualRichar Eladio Centeno CarielesNo ratings yet
- Cross Référence MOSFETSDocument67 pagesCross Référence MOSFETSapi-26235400100% (1)
- 00 PortadaDocument1 page00 PortadaEduardo ColinNo ratings yet
- Manual EepromDocument6 pagesManual EepromSergio Hernandez100% (1)
- New NGP Presentations - Sleeper OptionsDocument19 pagesNew NGP Presentations - Sleeper OptionsEduardo ColinNo ratings yet
- Digital Potentiometers PDFDocument1 pageDigital Potentiometers PDFEcu FixNo ratings yet
- Resumen Lineales HitachiDocument28 pagesResumen Lineales HitachiEduardo ColinNo ratings yet
- Cross de SCR 01Document13 pagesCross de SCR 01Eduardo ColinNo ratings yet
- Digital Potentiometers PDFDocument1 pageDigital Potentiometers PDFEcu FixNo ratings yet
- BUX37Document1 pageBUX37Eduardo ColinNo ratings yet
- 313 Powertrain Electronics Ver4 May 10 2012Document87 pages313 Powertrain Electronics Ver4 May 10 2012Eduardo Colin100% (1)
- Cross Référence MOSFETSDocument67 pagesCross Référence MOSFETSapi-26235400100% (1)
- Delco Remy Service Parts: Model 1990379Document6 pagesDelco Remy Service Parts: Model 1990379Eduardo ColinNo ratings yet
- Exhaust System: SectionDocument6 pagesExhaust System: SectionEduardo ColinNo ratings yet
- Thyristor - Cross ReferenceDocument13 pagesThyristor - Cross Referencerachmanjkt100% (2)
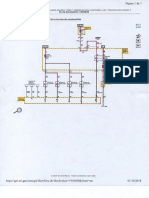
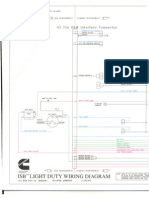
- Diagrama de Cableado Isb Camioneta Light DutyDocument6 pagesDiagrama de Cableado Isb Camioneta Light DutyMaksim Panfilov100% (1)
- Squeak and Rattle Troubleshooting GuideDocument32 pagesSqueak and Rattle Troubleshooting GuideEduardo ColinNo ratings yet
- Engine Control System: SectionDocument989 pagesEngine Control System: SectionEduardo ColinNo ratings yet
- Engine Cooling System: SectionDocument47 pagesEngine Cooling System: SectionEduardo ColinNo ratings yet
- Driver Information System: SectionDocument53 pagesDriver Information System: SectionEduardo Colin100% (1)
- Clutch: SectionDocument19 pagesClutch: SectionEduardo ColinNo ratings yet
- Motor YD25 y KA24 PDFDocument211 pagesMotor YD25 y KA24 PDFClareth Antonio Rodriguez LopezNo ratings yet
- Brake Control System: SectionDocument75 pagesBrake Control System: SectionEduardo ColinNo ratings yet
- Brake System: SectionDocument33 pagesBrake System: SectionEduardo ColinNo ratings yet
- Microsoft Security Product Roadmap Brief All Invitations-2023 AprilDocument5 pagesMicrosoft Security Product Roadmap Brief All Invitations-2023 Apriltsai wen yenNo ratings yet
- NIJ Sawmark Analysis Manual for Criminal MutilationDocument49 pagesNIJ Sawmark Analysis Manual for Criminal MutilationAntonio jose Garrido carvajalinoNo ratings yet
- SDRRM Earthquake Drill TemplateDocument3 pagesSDRRM Earthquake Drill TemplateChristian Bonne MarimlaNo ratings yet
- The Three Pillars of The ASEANDocument13 pagesThe Three Pillars of The ASEANLouwell Abejo RiñoNo ratings yet
- Internship Report On Incepta PharmaceutiDocument31 pagesInternship Report On Incepta PharmaceutihhaiderNo ratings yet
- EPON ONU with 4FE+WiFi EONU-04WDocument4 pagesEPON ONU with 4FE+WiFi EONU-04WAndres Alberto ParraNo ratings yet
- Vertical Transportation SystemDocument15 pagesVertical Transportation SystemAnupama MorankarNo ratings yet
- Telegram Log File Details Launch Settings Fonts OpenGLDocument5 pagesTelegram Log File Details Launch Settings Fonts OpenGLThe nofrizalNo ratings yet
- Yatendra Kumar Sharma ResumeDocument3 pagesYatendra Kumar Sharma ResumeDheeraj SharmaNo ratings yet
- Dbms PracticalDocument31 pagesDbms Practicalgautamchauhan566No ratings yet
- English 3 PDFDocument177 pagesEnglish 3 PDFÇèrela ĆlavəcillasNo ratings yet
- Dental Pulp TissueDocument77 pagesDental Pulp TissueJyoti RahejaNo ratings yet
- Ndeb Bned Reference Texts 2019 PDFDocument11 pagesNdeb Bned Reference Texts 2019 PDFnavroop bajwaNo ratings yet
- JSMSC - TDv3 6 20Document251 pagesJSMSC - TDv3 6 20Jason20170% (1)
- Letter of Invitation ESVC 3000 2024 1Document2 pagesLetter of Invitation ESVC 3000 2024 1pradeep kumarNo ratings yet
- FND Global and FND Profile PDFDocument4 pagesFND Global and FND Profile PDFSaquib.MahmoodNo ratings yet
- Cambridge English Business Vantage Sample Paper 1 Listening v2Document5 pagesCambridge English Business Vantage Sample Paper 1 Listening v2salma23478No ratings yet
- Cowell - The Wizards of Once PDFDocument315 pagesCowell - The Wizards of Once PDFtatoes n lases100% (1)
- The 10 Most Inspiring Quotes of Charles F HaanelDocument21 pagesThe 10 Most Inspiring Quotes of Charles F HaanelKallisti Publishing Inc - "The Books You Need to Succeed"100% (2)
- Training Report PRASADDocument32 pagesTraining Report PRASADshekharazad_suman85% (13)
- Audiology DissertationDocument4 pagesAudiology DissertationPaperWritingHelpOnlineUK100% (1)
- Book Notes - The Life Changing Magic of Tidying Up PDFDocument6 pagesBook Notes - The Life Changing Magic of Tidying Up PDFAilyn Bagares AñanoNo ratings yet
- RCD-GillesaniaDocument468 pagesRCD-GillesaniaJomarie Alcano100% (2)
- Kafka Netdb 06 2011 PDFDocument15 pagesKafka Netdb 06 2011 PDFaarishgNo ratings yet
- Hercules Segers - Painter EtchterDocument4 pagesHercules Segers - Painter EtchterArtdataNo ratings yet
- Green Tree PythonDocument1 pageGreen Tree Pythonapi-379174072No ratings yet
- Nad C541iDocument37 pagesNad C541iapi-3837207No ratings yet
- Far Eastern University Institute of Tourism and Hotel Management Tourism Management Program 1 Semester A.Y. 2019 - 2020Document46 pagesFar Eastern University Institute of Tourism and Hotel Management Tourism Management Program 1 Semester A.Y. 2019 - 2020Mico BolorNo ratings yet
- Rectangle StabbingDocument49 pagesRectangle StabbingApurba DasNo ratings yet
- Black Veil BridesDocument2 pagesBlack Veil BridesElyza MiradonaNo ratings yet