You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- ESAS Actual and Preboard Objectives 2Document6 pagesESAS Actual and Preboard Objectives 2Zendrick MaltoNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Acetal (POM) Molding and Extrusion Materials: Standard Classification ForDocument9 pagesAcetal (POM) Molding and Extrusion Materials: Standard Classification ForraulNo ratings yet
- As 2358-1990 Adhesives - For Fixing Ceramic TilesDocument8 pagesAs 2358-1990 Adhesives - For Fixing Ceramic TilesSAI Global - APAC100% (1)
- Physical Characteristics of Calcium Induced K-Carrageenan NetworksDocument6 pagesPhysical Characteristics of Calcium Induced K-Carrageenan NetworksFrancisco100% (1)
- Design of RC Members Under FlexureDocument16 pagesDesign of RC Members Under FlexureMelkamu DemewezNo ratings yet
- Sustainability 14 11189 v2 PDFDocument25 pagesSustainability 14 11189 v2 PDFZhiger KurmangalievNo ratings yet
- Me - WK 6Document17 pagesMe - WK 6JAMES CLEARNo ratings yet
- b8 EngDocument42 pagesb8 EngSimona KosteskaNo ratings yet
- 2016 FSAE Structural Equivalency Spreadsheet V1.5Document138 pages2016 FSAE Structural Equivalency Spreadsheet V1.5PrasadHdNo ratings yet
- Materials and Design: E.H. Amalu, N.N. Ekere, S. MallikDocument9 pagesMaterials and Design: E.H. Amalu, N.N. Ekere, S. MallikTHIMMAPPANo ratings yet
- Seminar 1 - Stainless Steel and Its ApplicationsDocument105 pagesSeminar 1 - Stainless Steel and Its ApplicationspripramadaNo ratings yet
- Module 4Document37 pagesModule 4imbrannNo ratings yet
- PrintAnsys 6 SemDocument9 pagesPrintAnsys 6 SemManjunatha S SheemandanavarNo ratings yet
- Fiber 1 PDFDocument17 pagesFiber 1 PDFSHAIKH MAHFUZUR RAHMANNo ratings yet
- MR Eftekhari PHD DissertationDocument291 pagesMR Eftekhari PHD Dissertationrake1984No ratings yet
- Structural Analysis For US-APWR RCPM FlywheelDocument19 pagesStructural Analysis For US-APWR RCPM FlywheelChris StroudNo ratings yet
- Lecture 3 Properties of MaterialsDocument57 pagesLecture 3 Properties of MaterialsRoy MarechaNo ratings yet
- Theory of Fiber Reinforced MaterialsDocument702 pagesTheory of Fiber Reinforced MaterialsPonsyo PonsiNo ratings yet
- Alternative View On Geotechnical Parameters ForDocument14 pagesAlternative View On Geotechnical Parameters ForbrodieNo ratings yet
- Biomechanics in Restorative Dentistry: Dr. Kaladevi M and Dr. Ramaprabha BalasubramaniamDocument6 pagesBiomechanics in Restorative Dentistry: Dr. Kaladevi M and Dr. Ramaprabha BalasubramaniamkarishmaNo ratings yet
- REVISED 3 Cell Box Culvert 20mDocument144 pagesREVISED 3 Cell Box Culvert 20mV P GUPTA50% (2)
- Experimental Study of Failure Differences in Hard Rock Under True Triaxial CompressionDocument14 pagesExperimental Study of Failure Differences in Hard Rock Under True Triaxial CompressionroapazacNo ratings yet
- 507 33 Powerpoint-Slides Ch1 DRCSDocument94 pages507 33 Powerpoint-Slides Ch1 DRCSAniket WaghmareNo ratings yet
- Class - XiDocument35 pagesClass - XiKirti PathakNo ratings yet
- Cycom PR 520N RTM CM en PDFDocument7 pagesCycom PR 520N RTM CM en PDFIvan SilveiraNo ratings yet
- Mechanical Behavior of MaterialDocument14 pagesMechanical Behavior of MaterialNAGARAJUNo ratings yet
- PLAXIS 2D 2017 Tutorial Lesson07Document13 pagesPLAXIS 2D 2017 Tutorial Lesson07Boni TamaNo ratings yet
- Bolted Bamboo Joints Reinforced With Fibers: SciencedirectDocument7 pagesBolted Bamboo Joints Reinforced With Fibers: SciencedirectMario Cruz BaNo ratings yet
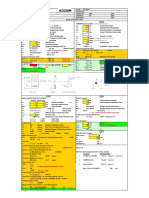
- BS5400-R-C-Design-With-Crack-Width SampleDocument1 pageBS5400-R-C-Design-With-Crack-Width SampleAlden CayagaNo ratings yet
- Alulight Datasheets En2006Document8 pagesAlulight Datasheets En2006DaniNo ratings yet