You might also like
- Lecture 7 - AVR Interrupt ProgrammingDocument26 pagesLecture 7 - AVR Interrupt Programmingmminhdoan2203No ratings yet
- Ch10 AVR Interrupt ProgrammingDocument23 pagesCh10 AVR Interrupt ProgrammingWarforce Rox100% (1)
- ATmega Interrupts Explained/TITLEDocument17 pagesATmega Interrupts Explained/TITLEJarfoNo ratings yet
- 4 Experiment 4 Interrupt and I/O InterfacingDocument17 pages4 Experiment 4 Interrupt and I/O InterfacingSuhas NipaneNo ratings yet
- roject mẫu AVR2Document58 pagesroject mẫu AVR2luuvuduc81No ratings yet
- Embedded Systems - Lec 4 - InterruptsDocument29 pagesEmbedded Systems - Lec 4 - InterruptsIslam Abd ElhadlyNo ratings yet
- Dsp programs for signal generation and ADC acquisitionDocument14 pagesDsp programs for signal generation and ADC acquisitionJaipaul CheernamNo ratings yet
- Government Engineering College, GandhinagarDocument8 pagesGovernment Engineering College, GandhinagarDhrumil ManiyarNo ratings yet
- Interrupts: Lecture# 13 Microprocessor Systems and InterfacingDocument16 pagesInterrupts: Lecture# 13 Microprocessor Systems and InterfacingMahreenNo ratings yet
- Micro Lab 6Document10 pagesMicro Lab 6Hacker YousafzaiNo ratings yet
- Development Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Document13 pagesDevelopment Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Thông NguyễnNo ratings yet
- Project CodeDocument6 pagesProject CodeK M Kiran KumarNo ratings yet
- Module - III (A&B)Document80 pagesModule - III (A&B)PamusainagaharshavardhanNo ratings yet
- Topic 11 - ATMega32 Interrupt in C (ISMAIL - FKEUTM 2018)Document60 pagesTopic 11 - ATMega32 Interrupt in C (ISMAIL - FKEUTM 2018)Aya AmirNo ratings yet
- Interrupts in Atmega16Document3 pagesInterrupts in Atmega16Anoop S PillaiNo ratings yet
- M518 InterruptsDocument12 pagesM518 Interruptsअमरेश झाNo ratings yet
- Timer Interrupts in C: CS02 CS01 CS00Document4 pagesTimer Interrupts in C: CS02 CS01 CS00Emin KültürelNo ratings yet
- Ee 222 CepDocument10 pagesEe 222 CepObed AhmadNo ratings yet
- Avr Atmega128 Interrupts Cheat-SheetDocument14 pagesAvr Atmega128 Interrupts Cheat-SheetNick TarasNo ratings yet
- Lecture 7Document48 pagesLecture 7tecleador1No ratings yet
- AVR Microcontroller Interrupts ExplainedDocument4 pagesAVR Microcontroller Interrupts ExplainedMohamed AshrafNo ratings yet
- Pin No. Pin Name Description Alternate FunctionDocument7 pagesPin No. Pin Name Description Alternate FunctionnareshhhhhNo ratings yet
- 05 AVR Timer-Counter AVRDocument95 pages05 AVR Timer-Counter AVRPriscillaNo ratings yet
- Interrupt ProgrammingDocument20 pagesInterrupt ProgrammingpratikgohelNo ratings yet
- ES Exp 10Document13 pagesES Exp 10Maryam TariqNo ratings yet
- Interrupts: 11.1 Interrupt Vectors in Atmega328PDocument1 pageInterrupts: 11.1 Interrupt Vectors in Atmega328PnamerNo ratings yet
- 8051 Microcontroller External Interrupt ProgrammingDocument28 pages8051 Microcontroller External Interrupt ProgrammingsharadaNo ratings yet
- CED19I032Document13 pagesCED19I032Pranavram VNo ratings yet
- True RMSDocument5 pagesTrue RMSnguyen van ANNo ratings yet
- 1 - Analog To Digital Conversion in LPC2129Document4 pages1 - Analog To Digital Conversion in LPC2129imbharteshNo ratings yet
- 5 InterruptsDocument9 pages5 InterruptsTam PhamNo ratings yet
- Laboratory Report (For Online Lab Class Only) : ECTE333: Microcontroller Architecture and Application Spring 2020 SessionDocument8 pagesLaboratory Report (For Online Lab Class Only) : ECTE333: Microcontroller Architecture and Application Spring 2020 SessionSaad KamranNo ratings yet
- Arduino NoteDocument9 pagesArduino NoteMircea TirziuNo ratings yet
- Interrupts ProgrammingDocument7 pagesInterrupts Programmingirfan_kembhaviNo ratings yet
- Tutorial 6 (External Interrupt)Document5 pagesTutorial 6 (External Interrupt)M.SadatNo ratings yet
- Lect 20 EtDocument10 pagesLect 20 EtmadhavNo ratings yet
- 8051 CH11Document73 pages8051 CH11tansnvarmaNo ratings yet
- Timer0 Code ATmega328pDocument3 pagesTimer0 Code ATmega328pmladen divacNo ratings yet
- Avr Timer Interrupts in CDocument3 pagesAvr Timer Interrupts in CPolitik Itu KejamNo ratings yet
- Serial COMDocument95 pagesSerial COMDedi SupardiNo ratings yet
- Microprocessor Interfacing & Programming: Laboratory ManualDocument13 pagesMicroprocessor Interfacing & Programming: Laboratory ManualMuneeb Ahmad NasirNo ratings yet
- IA2 - Scheme & Sol MC - by TauseefDocument6 pagesIA2 - Scheme & Sol MC - by Tauseefjvgirish74No ratings yet
- Timer CounterDocument27 pagesTimer Counterusama saleemNo ratings yet
- Digital Theromometer Using 8051Document17 pagesDigital Theromometer Using 8051BALASUBRAMANIAN N BALASUBRAMANIAN NNo ratings yet
- Embedded Systems Assignment 2Document6 pagesEmbedded Systems Assignment 2ramrevolt55No ratings yet
- Embedded staircase light using ArduinoDocument13 pagesEmbedded staircase light using ArduinoKabinad TeshagerNo ratings yet
- Embedded SystemsDocument12 pagesEmbedded SystemsAl-Amin BhuiyanNo ratings yet
- A3 After MIDDocument6 pagesA3 After MIDArslan Bin ShabeerNo ratings yet
- AVR 133: Long Delay Generation Using The AVR MicrocontrollerDocument8 pagesAVR 133: Long Delay Generation Using The AVR MicrocontrollernicoletabytaxNo ratings yet
- Laporan: Nama Kelompok: Ariesta Ayuning Fitri (1041160019) Goliat Galih Satria (1041160013)Document9 pagesLaporan: Nama Kelompok: Ariesta Ayuning Fitri (1041160019) Goliat Galih Satria (1041160013)Goliat GalihNo ratings yet
- MICROPROCESSOR INTERRUPTS PROGRAMMINGDocument31 pagesMICROPROCESSOR INTERRUPTS PROGRAMMINGAbdul Rehman AfzalNo ratings yet
- AVR Microcontroller TestDocument9 pagesAVR Microcontroller TestNiranjan AgravatNo ratings yet
- Lab 06-Application and Understanding of Analog To Digital Conversion (A/D)Document6 pagesLab 06-Application and Understanding of Analog To Digital Conversion (A/D)Nida AliNo ratings yet
- Program CVAVR ATmega16ADocument4 pagesProgram CVAVR ATmega16ARMurbahNo ratings yet
- CED19I032Document20 pagesCED19I032Pranavram VNo ratings yet
- Microcontrollers LabDocument19 pagesMicrocontrollers LabAMARNATHNAIDU77No ratings yet
- Report On Full Bridge RectifierDocument12 pagesReport On Full Bridge RectifierArchit SahayNo ratings yet
- Pin No. Pin Name Description Alternate FunctionDocument6 pagesPin No. Pin Name Description Alternate FunctionnareshhhhhNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Ch11 AVR Serial Port Programming-1Document12 pagesCh11 AVR Serial Port Programming-1Simple knowledgeNo ratings yet
- Homework 9 - SimDocument1 pageHomework 9 - SimSimple knowledgeNo ratings yet
- Ch13 ADC, DAC and Sensor InterfacingDocument33 pagesCh13 ADC, DAC and Sensor InterfacingSimple knowledgeNo ratings yet
- AVR Serial Port Programming in Assembly and CDocument25 pagesAVR Serial Port Programming in Assembly and CSimple knowledgeNo ratings yet
- AVR Programming in CDocument54 pagesAVR Programming in Csajid rajaNo ratings yet
- Ch13 ADC, DAC and Sensor InterfacingDocument33 pagesCh13 ADC, DAC and Sensor InterfacingSimple knowledgeNo ratings yet
- Ch11 AVR Serial Port Programming-1Document12 pagesCh11 AVR Serial Port Programming-1Simple knowledgeNo ratings yet
- Ch17 Spi Protocol and Max7221 Display InterfacingDocument51 pagesCh17 Spi Protocol and Max7221 Display InterfacingSimple knowledgeNo ratings yet
- AVR Programming in CDocument54 pagesAVR Programming in Csajid rajaNo ratings yet
- Programat EP 3010Document6 pagesProgramat EP 3010Toma IoanaNo ratings yet
- Introductiontoee New1Document221 pagesIntroductiontoee New1Teophelus HamutenyaNo ratings yet
- Battery Link Dbdc10 Manual 1278Document12 pagesBattery Link Dbdc10 Manual 1278edward blancoNo ratings yet
- ITYS-E 6-10kVA MSMITYTWXX31-GB 00Document24 pagesITYS-E 6-10kVA MSMITYTWXX31-GB 00Anuradhe ThilakarathnaNo ratings yet
- Communications Engineering Mastery Test 8 ECE Pre-BoardDocument35 pagesCommunications Engineering Mastery Test 8 ECE Pre-BoardXyNo ratings yet
- Mariner X2 Class B AIS TransceiverDocument2 pagesMariner X2 Class B AIS TransceiverVladimirNo ratings yet
- JHS 182 Service ManualDocument168 pagesJHS 182 Service Manualbg2tt100% (5)
- Instruction Manual: Please Read These Instructions Carefully and Retain For Future ReferenceDocument8 pagesInstruction Manual: Please Read These Instructions Carefully and Retain For Future Referencerisa apriliaNo ratings yet
- Automatic Chicken FeedDocument35 pagesAutomatic Chicken Feedheny prawarisNo ratings yet
- Config DolphinDocument3 pagesConfig DolphinFarhanNo ratings yet
- HVi5 Datasheet enDocument6 pagesHVi5 Datasheet enPraveen RamNo ratings yet
- A1700camax-metermarket-datasheetDocument12 pagesA1700camax-metermarket-datasheetcaigenjieNo ratings yet
- Three Phase Transformer Connections and Basics PDFDocument13 pagesThree Phase Transformer Connections and Basics PDFDAYA LAHARENo ratings yet
- Grade 6 PPT Math q4 w4Document18 pagesGrade 6 PPT Math q4 w4Cristal Iba?zNo ratings yet
- SP Singhania University B.Tech Electrical Engineering Comprehensive Viva Voce QuizDocument5 pagesSP Singhania University B.Tech Electrical Engineering Comprehensive Viva Voce QuizViru JaiNo ratings yet
- MM - Chapter 0Document37 pagesMM - Chapter 0JOSE ADOLFO MONTALVO QUINTAL.No ratings yet
- HOA7320 RevA ManDocument48 pagesHOA7320 RevA MantsunamionnetNo ratings yet
- 920i-Indicator-Installation MANUAL INDICADOR RICE LAKE 920I PDFDocument144 pages920i-Indicator-Installation MANUAL INDICADOR RICE LAKE 920I PDFinbascolNo ratings yet
- Max-3 Ehf CatalogDocument2 pagesMax-3 Ehf Catalogಶ್ರೀಕಾಂತ್ ತಿಪ್ಪೇರುದ್ರಪ್ಪNo ratings yet
- AMFDocument4 pagesAMFpapasp105305No ratings yet
- Accu 210 Manual T 05Document15 pagesAccu 210 Manual T 05efrain HuamanNo ratings yet
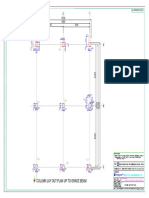
- Column Lay Out Plan Up To Grade Beam: EnergypacDocument6 pagesColumn Lay Out Plan Up To Grade Beam: EnergypacDesign explorer olomizanaNo ratings yet
- DC30-010 - ODYSSEY Operator Manual - Rev PDocument92 pagesDC30-010 - ODYSSEY Operator Manual - Rev PYolanda Peña100% (1)
- New Universal Remote Control Programmable as Many Times as You LikeDocument2 pagesNew Universal Remote Control Programmable as Many Times as You Likedolfinblabla50% (2)
- BCS630 Kta38 G1 PDFDocument9 pagesBCS630 Kta38 G1 PDFAlbertoNo ratings yet
- EV1Document59 pagesEV1gulmohammad100% (2)
- Data Sheet Single - 2002 - MI - 2088 - Earth - Insulaation - AngDocument4 pagesData Sheet Single - 2002 - MI - 2088 - Earth - Insulaation - Angjavitron13No ratings yet
- Danfoss B35C5B R600a 115 60Document4 pagesDanfoss B35C5B R600a 115 60ARTURO GALINDONo ratings yet
- Potentiometer 1Document19 pagesPotentiometer 1Kritika GuptaNo ratings yet
- VitaDocument27 pagesVitaeng_electronics82No ratings yet