You might also like
- L4-1 KalmanDocument24 pagesL4-1 Kalmanhu jackNo ratings yet
- Kalman and Bayesian Filters in PythonDocument17 pagesKalman and Bayesian Filters in PythonAndrew FongNo ratings yet
- Linear Quadratic (LQG) ControlDocument18 pagesLinear Quadratic (LQG) ControlbalkyderNo ratings yet
- Exercise 6: Probability and Random Processes For Signals and SystemsDocument2 pagesExercise 6: Probability and Random Processes For Signals and SystemsGpNo ratings yet
- I. Introduction To Time Series Analysis: X X ... X X XDocument56 pagesI. Introduction To Time Series Analysis: X X ... X X XCollins MuseraNo ratings yet
- Understanding and Applying Kalman FilterDocument34 pagesUnderstanding and Applying Kalman FilterNahom GirmaNo ratings yet
- Kalman Filter State Estimation of an Inverted Pendulum SystemDocument15 pagesKalman Filter State Estimation of an Inverted Pendulum SystemdhineshpNo ratings yet
- Alireza JavaheriDocument17 pagesAlireza JavaheriAloke ChatterjeeNo ratings yet
- Electromagnetic fields and their quantizationsDocument23 pagesElectromagnetic fields and their quantizationsanthyaby21No ratings yet
- Kalman FilterDocument27 pagesKalman FilterBrett Welch100% (2)
- Topic Two: II. Stationarity and ARMA ModellingDocument24 pagesTopic Two: II. Stationarity and ARMA ModellingCollins MuseraNo ratings yet
- State SpaceDocument48 pagesState SpacekanchiNo ratings yet
- Adap LathDocument48 pagesAdap LathKarsid Politeknik Negeri IndramayuNo ratings yet
- Linear Quadratic Regulator (LQR) State Feedback Design: R T U R T X XDocument10 pagesLinear Quadratic Regulator (LQR) State Feedback Design: R T U R T X Xpraveen3530No ratings yet
- Kalman's TestDocument10 pagesKalman's TestjaganathapandianNo ratings yet
- Understanding and Applying Kalman FilteringDocument37 pagesUnderstanding and Applying Kalman FilteringosamazimNo ratings yet
- Understanding and Applying Kalman FilteringDocument37 pagesUnderstanding and Applying Kalman FilteringKoustuvGaraiNo ratings yet
- KalmanDocument34 pagesKalmanbilal309No ratings yet
- State Observers (p751)Document6 pagesState Observers (p751)Abdullah Abu LehyahNo ratings yet
- Robust Video Stabilization Using Particle Filter TrackingDocument45 pagesRobust Video Stabilization Using Particle Filter TrackingOwais ShahNo ratings yet
- Tutorial KFDocument13 pagesTutorial KFkidusNo ratings yet
- ch4 KFderivDocument22 pagesch4 KFderivaleksandarpmauNo ratings yet
- State Observer (Estimator)Document18 pagesState Observer (Estimator)Shahrukh GillNo ratings yet
- What Is System Identification ?Document8 pagesWhat Is System Identification ?Satria NugrahaNo ratings yet
- Mathematical Statistics - Kalman Filter Equation Derivation - Cross ValidatedDocument4 pagesMathematical Statistics - Kalman Filter Equation Derivation - Cross ValidatedMuhammad HaroonNo ratings yet
- Exercises for Course on State-Space Control Systems (SSC) - LQGDocument2 pagesExercises for Course on State-Space Control Systems (SSC) - LQGSreeja Sunder100% (1)
- Filtering Noisy ECG Signals Using The Extended Kalman Filter Based On A Modified Dynamic ECG ModelDocument4 pagesFiltering Noisy ECG Signals Using The Extended Kalman Filter Based On A Modified Dynamic ECG ModelKarthik Raj VNo ratings yet
- Proceedings of the 33rd Conference on Decision and ControlDocument5 pagesProceedings of the 33rd Conference on Decision and ControlAmino fileNo ratings yet
- CY4A2 Advanced System Identification Lecture 7: The Kalman Filter (less than 40 charsDocument25 pagesCY4A2 Advanced System Identification Lecture 7: The Kalman Filter (less than 40 charsChristian OkregheNo ratings yet
- Optimal State EstimationDocument17 pagesOptimal State Estimationvicenc puigNo ratings yet
- Robust Adaptive Filtering Approach For Envelope and Harmonic EstimationDocument5 pagesRobust Adaptive Filtering Approach For Envelope and Harmonic EstimationFabien CallodNo ratings yet
- Adaptive Unscented Filtering Technique and Particle Swarm Optimization For Estimation of Non-Stationary Signal ParametersDocument6 pagesAdaptive Unscented Filtering Technique and Particle Swarm Optimization For Estimation of Non-Stationary Signal ParameterssarojxyzNo ratings yet
- Lecture 5Document16 pagesLecture 5Adityan Ilmawan PutraNo ratings yet
- Assignment 2Document3 pagesAssignment 2phatctNo ratings yet
- Linear Quadratic Regulator (LQR) State Feedback Design: R T U R T XDocument10 pagesLinear Quadratic Regulator (LQR) State Feedback Design: R T U R T XrameshsmeNo ratings yet
- Minimum variance control propertiesDocument39 pagesMinimum variance control propertiesbalkyderNo ratings yet
- HW 5 SolDocument20 pagesHW 5 SolKhoa Le TienNo ratings yet
- kalman_filteringDocument15 pageskalman_filteringCường Lê VănNo ratings yet
- Estimation 2 PDFDocument44 pagesEstimation 2 PDFsamina butoolNo ratings yet
- Sequential CircuitsDocument11 pagesSequential CircuitsGoutham RamakrishnanNo ratings yet
- Load F Requan Cy Contro 201Document20 pagesLoad F Requan Cy Contro 201Focus OnNo ratings yet
- Stabilization of Nonlinear SystemDocument7 pagesStabilization of Nonlinear SystemSaht Park Ulyshi AhaanNo ratings yet
- Poles Selection TheoryDocument6 pagesPoles Selection TheoryRao ZubairNo ratings yet
- Convergence Analysis of Extended KalmanDocument10 pagesConvergence Analysis of Extended Kalmansumathy SNo ratings yet
- Tools For Kalman Filter TunningDocument6 pagesTools For Kalman Filter Tunningnadamau22633No ratings yet
- Exam in Automatic Control II Reglerteknik II 5hp: Good Luck!Document10 pagesExam in Automatic Control II Reglerteknik II 5hp: Good Luck!Armando MaloneNo ratings yet
- Lecture 21alt BIST - Built-In Self-Test: (Alternative To Lectures 25, 26 and 27)Document28 pagesLecture 21alt BIST - Built-In Self-Test: (Alternative To Lectures 25, 26 and 27)Aniket samajeNo ratings yet
- TS PartIIDocument50 pagesTS PartIIأبوسوار هندسةNo ratings yet
- Inno2020 Emt4203 Control II Chap3.3-4 LQ OptimalDocument11 pagesInno2020 Emt4203 Control II Chap3.3-4 LQ Optimalkabuej3No ratings yet
- LQR Linear Quadratic Regulator: A State Space Optimal Control Technique Brett ShapiroDocument41 pagesLQR Linear Quadratic Regulator: A State Space Optimal Control Technique Brett ShapirorameshsmeNo ratings yet
- Chaotic Systems and Chua's CircuitDocument17 pagesChaotic Systems and Chua's CircuitArka ChakrabortyNo ratings yet
- Nonlinear Control Systems 1. - Introduction To Nonlinear SystemsDocument54 pagesNonlinear Control Systems 1. - Introduction To Nonlinear SystemsGech ManNo ratings yet
- FORECASTING TIME SERIES WITH ARMA AND ARIMA MODELSDocument35 pagesFORECASTING TIME SERIES WITH ARMA AND ARIMA MODELSMochammad Adji FirmansyahNo ratings yet
- Generalized Riccati Equation and Spectral Factorization For Discrete-Time Descriptor SystemDocument4 pagesGeneralized Riccati Equation and Spectral Factorization For Discrete-Time Descriptor SystemsumathyNo ratings yet
- Digital Image Wiener and Kalman FiltersDocument48 pagesDigital Image Wiener and Kalman FiltersfcikanNo ratings yet
- 1991 - Zz-Subspace Algorithms For The Stochastic Identification Problem-1991Document6 pages1991 - Zz-Subspace Algorithms For The Stochastic Identification Problem-1991Guille Ciprian NoaNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Computational NeuroendocrinologyFrom EverandComputational NeuroendocrinologyDuncan J. MacGregorNo ratings yet
- 10 Acknowledgement SlipDocument1 page10 Acknowledgement SlipumarsaboNo ratings yet
- MaiunguwaDocument2 pagesMaiunguwaumarsaboNo ratings yet
- 10 Acknowledgement SlipDocument1 page10 Acknowledgement SlipumarsaboNo ratings yet
- 10 Acknowledgement SlipDocument1 page10 Acknowledgement SlipumarsaboNo ratings yet
- 10 Acknowledgement SlipDocument1 page10 Acknowledgement SlipumarsaboNo ratings yet
- 10 Acknowledgement SlipDocument1 page10 Acknowledgement SlipumarsaboNo ratings yet
- Part A of Regulations Governing Higher Degrees and Postgraduate Diplomas 2018Document57 pagesPart A of Regulations Governing Higher Degrees and Postgraduate Diplomas 2018umarsaboNo ratings yet
- AI Exam Questions Genetic Algorithms Simulated Annealing Ant Colony OptimizationDocument25 pagesAI Exam Questions Genetic Algorithms Simulated Annealing Ant Colony OptimizationumarsaboNo ratings yet
- 10 Acknowledgement SlipDocument1 page10 Acknowledgement SlipumarsaboNo ratings yet
- Advert On IKJOSC 2Document1 pageAdvert On IKJOSC 2umarsaboNo ratings yet
- Uncertainty Analysis of The Adequacy Assessment Model of A Distributed Generation SystemDocument28 pagesUncertainty Analysis of The Adequacy Assessment Model of A Distributed Generation SystemumarsaboNo ratings yet
- 10 Acknowledgement SlipDocument1 page10 Acknowledgement SlipumarsaboNo ratings yet
- NSCDC Complete Past Questions 2019 PDFDocument40 pagesNSCDC Complete Past Questions 2019 PDFumarsabo100% (2)
- ELE9304 Syllabus 18-19Document3 pagesELE9304 Syllabus 18-19umarsaboNo ratings yet
- A M 1Document1 pageA M 1umarsaboNo ratings yet
- Re-2020-2021 Annual Appraisal ExerciseDocument1 pageRe-2020-2021 Annual Appraisal ExerciseumarsaboNo ratings yet
- Schematic DiagramsDocument17 pagesSchematic DiagramsumarsaboNo ratings yet
- ELE8311 - Module 1 - IntroductionDocument5 pagesELE8311 - Module 1 - IntroductionUmarSaboBabaDoguwaNo ratings yet
- Nigeria Immigration Past Questions & Answers Part 2Document16 pagesNigeria Immigration Past Questions & Answers Part 2umarsaboNo ratings yet
- Personnel Reg FormDocument9 pagesPersonnel Reg FormyodejiNo ratings yet
- Advert IKJOH 2Document1 pageAdvert IKJOH 2umarsaboNo ratings yet
- EE1401 POWER SYSTEM OPERATION AND CONTROL - Two Marks Questions and Answer & QBDocument16 pagesEE1401 POWER SYSTEM OPERATION AND CONTROL - Two Marks Questions and Answer & QBAmruthNo ratings yet
- Nigeria Immigration Past Questions & Answers Part 3Document19 pagesNigeria Immigration Past Questions & Answers Part 3umarsaboNo ratings yet
- Jamb Commerce Past QuestionsDocument77 pagesJamb Commerce Past QuestionsGloryNo ratings yet
- Scan 9 Sep 2021Document5 pagesScan 9 Sep 2021umarsaboNo ratings yet
- Digital Control Systems 4Document451 pagesDigital Control Systems 4doğancan100% (4)
- JAMB USE OF ENGLISH Past Questions (2010-2018Document168 pagesJAMB USE OF ENGLISH Past Questions (2010-2018Lola0% (1)
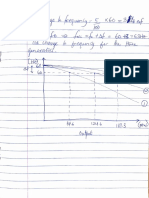
- If R X,: 13.5. Voltage and Reactive Power ControlDocument1 pageIf R X,: 13.5. Voltage and Reactive Power ControlumarsaboNo ratings yet
- English Novel: The Life ChangerDocument34 pagesEnglish Novel: The Life ChangerEdianaobongNo ratings yet
- Q1. The Equivalent Circuit in The Laplace DomainDocument23 pagesQ1. The Equivalent Circuit in The Laplace DomainumarsaboNo ratings yet
- Efficient Implementation of Superquadric Particles in DiscreteDocument18 pagesEfficient Implementation of Superquadric Particles in DiscretedavidusachNo ratings yet
- 2015 G5 ElimDocument7 pages2015 G5 ElimMelyn BustamanteNo ratings yet
- UT Dallas Syllabus For Math3303.501.10f Taught by Phillip Kisunzu (pxk091000)Document7 pagesUT Dallas Syllabus For Math3303.501.10f Taught by Phillip Kisunzu (pxk091000)UT Dallas Provost's Technology GroupNo ratings yet
- The Importance of Math in LifeDocument1 pageThe Importance of Math in LifeJomel De GuzmanNo ratings yet
- 08 Random Number GenerationDocument28 pages08 Random Number GenerationRupa DnNo ratings yet
- Presentation On JeeDocument2 pagesPresentation On JeePriyanshNo ratings yet
- DELD All CollectionDocument2,288 pagesDELD All CollectionSanket KarandeNo ratings yet
- Verification of Lami's Theorem: Experiment # 3Document6 pagesVerification of Lami's Theorem: Experiment # 3Vedansh GargNo ratings yet
- BV Cvxslides PDFDocument301 pagesBV Cvxslides PDFTeerapat JenrungrotNo ratings yet
- 1154-1619623260919-Unit 11 - Maths For Computing - Reworded - 2021Document53 pages1154-1619623260919-Unit 11 - Maths For Computing - Reworded - 2021Anuhas Nethmina100% (1)
- Perturbation Theory SlidesDocument18 pagesPerturbation Theory SlidesKarencita MartínezNo ratings yet
- Airfoil Generation With A Desktop Computer Using Lighthill's Exact Inverse MethodDocument18 pagesAirfoil Generation With A Desktop Computer Using Lighthill's Exact Inverse Methodalexiel1806No ratings yet
- EnggMath 2 Module 1Document38 pagesEnggMath 2 Module 1Kurt Louisse BilangoNo ratings yet
- Trigonometry: Trigonometry (From Greek Trigōnon, "Triangle" and Metron, "Measure"Document4 pagesTrigonometry: Trigonometry (From Greek Trigōnon, "Triangle" and Metron, "Measure"praveen_449No ratings yet
- Chapter 7 Algebraaic ExpressionsDocument33 pagesChapter 7 Algebraaic Expressionsnaza9775100% (2)
- Ri QP 164 Indian AbacusDocument7 pagesRi QP 164 Indian AbacusIndian Abacus100% (1)
- Knox 2016 2U Trials & SolutionsDocument25 pagesKnox 2016 2U Trials & SolutionsSumNo ratings yet
- 10.1515 - Spma 2020 0125Document5 pages10.1515 - Spma 2020 0125Leng RyanNo ratings yet
- Econometrics I: Chapter 3: Two Variable Regression Model: The Problem of EstimationDocument35 pagesEconometrics I: Chapter 3: Two Variable Regression Model: The Problem of EstimationawidyasNo ratings yet
- Gensler's Star TestDocument10 pagesGensler's Star Testchmurka1No ratings yet
- ME2353 Finite Element Analysis Lecture NotesDocument34 pagesME2353 Finite Element Analysis Lecture NoteschinnaNo ratings yet
- Vector Calculus ProblemsDocument11 pagesVector Calculus ProblemsNishanth VigneshNo ratings yet
- MathDocument16 pagesMathmuhammad mubeenNo ratings yet
- The Nepali Mathematical Sciences Report32Document91 pagesThe Nepali Mathematical Sciences Report32Mohit SaxenaNo ratings yet
- One Dimensional Convection: Interpolation Models For CFD: Gerald Recktenwald January 21, 2019Document24 pagesOne Dimensional Convection: Interpolation Models For CFD: Gerald Recktenwald January 21, 2019Level ThreeNo ratings yet
- Meritpathimoclasssiwithsol PDFDocument3 pagesMeritpathimoclasssiwithsol PDFAnumeha PaulNo ratings yet
- Linear Control System Analysis and DesignDocument1 pageLinear Control System Analysis and DesignFaisal MahmoodNo ratings yet
- CM 1 Mathematics in The Modern World Chapter 1Document9 pagesCM 1 Mathematics in The Modern World Chapter 1Maria Jenin DominicNo ratings yet
- Mca Sem 1 DMSDocument3 pagesMca Sem 1 DMSAbhijeet SinghNo ratings yet
- Mesl Elements 1Document7 pagesMesl Elements 1Backup Review Files YbanezNo ratings yet