You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Steel BeamDocument37 pagesSteel BeamJeten C Rika100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Design of Load Bearing Wall PanelsDocument48 pagesDesign of Load Bearing Wall Panelskairel82No ratings yet
- Lab8-Shear Force (New)Document15 pagesLab8-Shear Force (New)Nur Syamiza Zamri100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Connection FinalDocument127 pagesConnection FinalAfif AdnanNo ratings yet
- Shear Force and Bending Moment Diagrams: (SFD & BMD)Document98 pagesShear Force and Bending Moment Diagrams: (SFD & BMD)AlexNo ratings yet
- Rational Costing MethodDocument53 pagesRational Costing MethodSachinNo ratings yet
- Seismic Behaviour and Design of Composite Steel-Concrete StructuresDocument198 pagesSeismic Behaviour and Design of Composite Steel-Concrete Structuresuhu_plus6482No ratings yet
- Chapter 6Document51 pagesChapter 6Jarred JacksonNo ratings yet
- CE201 Statics Chap5Document26 pagesCE201 Statics Chap5zeromeansNo ratings yet
- IRS - Concrete Bridge Code PDFDocument114 pagesIRS - Concrete Bridge Code PDFankurshah1986100% (4)
- 2) Introduction To WSD, Rectangular BeamsDocument10 pages2) Introduction To WSD, Rectangular BeamsVanessa Rosal PalerNo ratings yet
- CE 4109: Design of Steel StructuresDocument50 pagesCE 4109: Design of Steel StructuresAfif AdnanNo ratings yet
- Shear Strength: Chapter G of The AISCDocument8 pagesShear Strength: Chapter G of The AISCAfif AdnanNo ratings yet
- Design of Reinforced Concrete Structures Enlighten To Bangladesh National Building CodeDocument42 pagesDesign of Reinforced Concrete Structures Enlighten To Bangladesh National Building CodeAfif AdnanNo ratings yet
- CE 4104: Building DesignDocument10 pagesCE 4104: Building DesignAfif AdnanNo ratings yet
- Water LoggingDocument9 pagesWater LoggingAfif AdnanNo ratings yet
- Grain Size Distribution Curve by Hydrometer Method: Diameter of The ParticlesDocument1 pageGrain Size Distribution Curve by Hydrometer Method: Diameter of The ParticlesAfif AdnanNo ratings yet
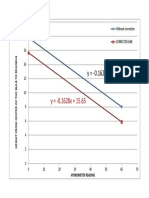
- Hydrometer FinalDocument1 pageHydrometer FinalAfif AdnanNo ratings yet
- Callibration HyDocument1 pageCallibration HyAfif AdnanNo ratings yet
- Large-Deflection and Post-Buckling Behavior of Slender Beam-Columns With Non-Linear End-Restraints PDFDocument17 pagesLarge-Deflection and Post-Buckling Behavior of Slender Beam-Columns With Non-Linear End-Restraints PDFstormstoneNo ratings yet
- A Comparative Study of Flexural and Shear Behavior of Ultra-High-Performance Fiber-Reinforced Concrete BeamsDocument12 pagesA Comparative Study of Flexural and Shear Behavior of Ultra-High-Performance Fiber-Reinforced Concrete BeamsJoaquinNo ratings yet
- Flexural Strengthening of Preloaded Reinforced Concrete 2019 Alexandria EngiDocument10 pagesFlexural Strengthening of Preloaded Reinforced Concrete 2019 Alexandria EngiSoumitra DasNo ratings yet
- Stud DesignDocument21 pagesStud DesignAddiahDr KofiNo ratings yet
- 07 DR. NAVEED Topic 6 Importance of Ductility in Structural Performance1Document69 pages07 DR. NAVEED Topic 6 Importance of Ductility in Structural Performance1Namrata ThapaNo ratings yet
- GiD+OpenSees Interface User ManualDocument189 pagesGiD+OpenSees Interface User Manualfranciscopinto29No ratings yet
- Load Cells Mounting Kits Catalog EN PDFDocument196 pagesLoad Cells Mounting Kits Catalog EN PDFtênchỉđểgọiNo ratings yet
- Nhi 15047Document1,694 pagesNhi 15047Edilberto Tibacan Villamil100% (1)
- Engr 3321 Ps 8 Lomibao Darwin ADocument8 pagesEngr 3321 Ps 8 Lomibao Darwin ADarwin LomibaoNo ratings yet
- Ladder Reinforcement AreaDocument2 pagesLadder Reinforcement AreaAkshay KosanamNo ratings yet
- (En) Design of A Steel Beams and ColumnsDocument110 pages(En) Design of A Steel Beams and ColumnsVirmantas JuoceviciusNo ratings yet
- BGSE MiscDet STLDocument13 pagesBGSE MiscDet STLIshwarya SrikanthNo ratings yet
- VITMEE Brochure 2021Document36 pagesVITMEE Brochure 2021REETESH NAGNo ratings yet
- Ms 1064Document5 pagesMs 1064Danny ThamNo ratings yet
- RC WallsDocument8 pagesRC WallsShita AlemieNo ratings yet
- Report and DesignDocument53 pagesReport and DesignRK PROJECT CONSULTANTSNo ratings yet
- Elated Worked ExamplesDocument24 pagesElated Worked ExamplesNaturinda SarahNo ratings yet
- Assignment PDFDocument6 pagesAssignment PDFRehan HakroNo ratings yet
- Non-Linear FEA of Base Plate Connections Used in Industrial Pallet Racking StructuresDocument9 pagesNon-Linear FEA of Base Plate Connections Used in Industrial Pallet Racking StructuressarbiniNo ratings yet
- HW - 10 CE 202 101.solutionsDocument8 pagesHW - 10 CE 202 101.solutionsjose angelNo ratings yet