You might also like
- Death and The CompassDocument12 pagesDeath and The CompassCrystal BerryNo ratings yet
- TCS New Employee Orientation ProgramDocument8 pagesTCS New Employee Orientation ProgramNeha Chopra0% (2)
- VDHS 4 Roll Squat DiveDocument43 pagesVDHS 4 Roll Squat DiveVeraniJNo ratings yet
- Asprova ScriptDocument109 pagesAsprova ScriptAnh VuNo ratings yet
- Lecture 23Document19 pagesLecture 23Ramsai ChigurupatiNo ratings yet
- Robotics MotionDocument29 pagesRobotics MotionfenixnomahotmailcomNo ratings yet
- MECH3100 Engineering DesignDocument37 pagesMECH3100 Engineering DesignsenthilmhNo ratings yet
- Ntccpptarunschanges2017 11 28 180318195538Document27 pagesNtccpptarunschanges2017 11 28 180318195538leorio88No ratings yet
- Lecture 6 - Modelling and Analysis of The Full VehicleDocument57 pagesLecture 6 - Modelling and Analysis of The Full Vehiclehotsync101No ratings yet
- RE-AASTU-PP-3 - Track Design PDFDocument52 pagesRE-AASTU-PP-3 - Track Design PDFnatnaelNo ratings yet
- Lect 10-11 - Intro To Robotics - Mobile RobotDocument32 pagesLect 10-11 - Intro To Robotics - Mobile RobotMark SherifNo ratings yet
- MEMS GyroscopeDocument39 pagesMEMS GyroscopeShobhit Yadav100% (4)
- Suspension Systems and ComponentsDocument42 pagesSuspension Systems and Componentsali awadNo ratings yet
- Cornering Steady State Definitions: DR A R M Harunur RashidDocument24 pagesCornering Steady State Definitions: DR A R M Harunur RashidItqanNo ratings yet
- Lab No 7 Meen21101037Document8 pagesLab No 7 Meen21101037Ali MunawarNo ratings yet
- Fundamentals of Vehicle Dynamics: Lecture 1-2Document26 pagesFundamentals of Vehicle Dynamics: Lecture 1-2obeidNo ratings yet
- Iare DomDocument100 pagesIare DomSulaiman AL MajdubNo ratings yet
- Trailer Body With Longitudinal, Lateral, and Yaw MotionDocument51 pagesTrailer Body With Longitudinal, Lateral, and Yaw MotionvamsiNo ratings yet
- VDHS 11 Suspension DesignDocument53 pagesVDHS 11 Suspension DesignSantiago UrgilesNo ratings yet
- Lecture 3Document31 pagesLecture 3Wolf DragonneNo ratings yet
- AutomobileDocument70 pagesAutomobileSanjay VaijNo ratings yet
- eduMIP ReportDocument48 pageseduMIP ReportmarcosfidelmeraNo ratings yet
- Robotics Manohar Notes Unit 3,4 & 5Document19 pagesRobotics Manohar Notes Unit 3,4 & 5Johnson PaulNo ratings yet
- Chapter-3 PTD NewDocument26 pagesChapter-3 PTD NewGODNo ratings yet
- Design LocomotionDocument36 pagesDesign LocomotionsherlockmsNo ratings yet
- Wheeled Locomotion: Autonomous Mobile RobotsDocument29 pagesWheeled Locomotion: Autonomous Mobile RobotsmbedeNo ratings yet
- Csir Co4 PDFDocument100 pagesCsir Co4 PDFRam MNo ratings yet
- Modeling of Rotational Systems 2023Document62 pagesModeling of Rotational Systems 2023Ndyamusiima SeresiNo ratings yet
- L02 5 Inertial - Nav SysDocument36 pagesL02 5 Inertial - Nav Sysm gopakumarNo ratings yet
- MEEN 201101004 LAB 07 Adnan Rasheed...Document8 pagesMEEN 201101004 LAB 07 Adnan Rasheed...Zohaib Arif MehmoodNo ratings yet
- FYP PresentationDocument81 pagesFYP PresentationTarek Bmr100% (1)
- Chaps 5Document27 pagesChaps 5Sagar RanabhatNo ratings yet
- Day 3 - Single Image OrientationDocument22 pagesDay 3 - Single Image OrientationAarthi shreeNo ratings yet
- Nav Inertial Navigation BWDocument53 pagesNav Inertial Navigation BWmeamsheanNo ratings yet
- Vehicle Systems: Lecture Notes Assoc. Prof. Dr. Levent YÜKSEKDocument49 pagesVehicle Systems: Lecture Notes Assoc. Prof. Dr. Levent YÜKSEKNeerajNo ratings yet
- Steer-by-Wire: Implications For Vehicle Handling and Safety: Paul Yih May 27, 2004Document63 pagesSteer-by-Wire: Implications For Vehicle Handling and Safety: Paul Yih May 27, 2004Mihir ShahNo ratings yet
- Spacecraft Subsystem Assemblies or Subsystem Mission ProfileDocument54 pagesSpacecraft Subsystem Assemblies or Subsystem Mission ProfileVINOTH G (RA1911019010100)No ratings yet
- Basic DifferentialDocument30 pagesBasic Differentialagussptra175No ratings yet
- Mobile RobotDocument50 pagesMobile RobotArun GuptaNo ratings yet
- DiwheelPaper v3Document10 pagesDiwheelPaper v3Sunita SinghNo ratings yet
- Elements of Mechanism 2: Cams 1.1 Definition of CamsDocument12 pagesElements of Mechanism 2: Cams 1.1 Definition of CamsMarianne DevillenaNo ratings yet
- 15-Suspension Systems and Components v2Document43 pages15-Suspension Systems and Components v2HanieyzMyNo ratings yet
- 1 Epicyclic Gear Train ExperimentDocument6 pages1 Epicyclic Gear Train Experimentshuyun88100% (6)
- Catia Digital Mock UpDocument31 pagesCatia Digital Mock UpslitantNo ratings yet
- AD&C Lecture 1newDocument78 pagesAD&C Lecture 1newinnobobothebossNo ratings yet
- Multi-Vehicle Adaptive Cruise Control With Collision Avoidance in Various TransitionsDocument18 pagesMulti-Vehicle Adaptive Cruise Control With Collision Avoidance in Various TransitionsmecharoNo ratings yet
- Self-Balancing MotorcycleDocument186 pagesSelf-Balancing MotorcycleFofanaNo ratings yet
- 8 - Kinematics of Mobile RobotsDocument27 pages8 - Kinematics of Mobile RobotsRAVI KIRAN REDDYNo ratings yet
- Cams H OutsDocument12 pagesCams H OutsODELLON NOLLEDONo ratings yet
- Digital Assignment - 1: Name: Shaik Naveed REG NO:20BMA0032 Subject: Automotive ChassisDocument8 pagesDigital Assignment - 1: Name: Shaik Naveed REG NO:20BMA0032 Subject: Automotive ChassisNaveed kingNo ratings yet
- Study of Steering Mechanism MechanicalDocument9 pagesStudy of Steering Mechanism MechanicalSANURASAGARNo ratings yet
- Nikhil PawarDocument16 pagesNikhil PawarNikhil PawarNo ratings yet
- 4 Mobile Robot VehiclesDocument56 pages4 Mobile Robot VehiclesHuỳnh Võ Thiện TuấnNo ratings yet
- Is A Common Precision Rotating Machine Element Having SingleDocument11 pagesIs A Common Precision Rotating Machine Element Having SingleMuhammad FarhalNo ratings yet
- Assuming That All The Elements of Epicyclic Gear Train Are Moving atDocument15 pagesAssuming That All The Elements of Epicyclic Gear Train Are Moving atMuhammad FarhalNo ratings yet
- Lecture 3 Kinematics and DynamicsDocument53 pagesLecture 3 Kinematics and Dynamicsyurong FengNo ratings yet
- Omni-Directional Drive and Mecanum PresentationDocument22 pagesOmni-Directional Drive and Mecanum PresentationRafael Ramírez Medina100% (1)
- Module4geartrains 190118175406Document41 pagesModule4geartrains 190118175406Mohamed El.shenawYNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
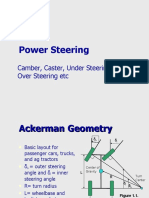
- Power Steering: Camber, Caster, Under Steering, Over Steering EtcDocument63 pagesPower Steering: Camber, Caster, Under Steering, Over Steering EtcShravan Bunny DuaNo ratings yet
- Steering Systems: Topics Covered in This PresentationDocument14 pagesSteering Systems: Topics Covered in This PresentationShravan Bunny DuaNo ratings yet
- ThermoDocument120 pagesThermoShravan Bunny DuaNo ratings yet
- Casting NotesDocument32 pagesCasting NotesShravan Bunny DuaNo ratings yet
- Detailed Report About Coir IndustryDocument35 pagesDetailed Report About Coir IndustryParthasarathi PNo ratings yet
- Earthquake Resistance BuildingDocument11 pagesEarthquake Resistance BuildingAnirudra Sharma100% (1)
- Students Innovation Festival Space HackathonDocument6 pagesStudents Innovation Festival Space HackathonAsad ShadNo ratings yet
- Linuxengines Blogspot inDocument9 pagesLinuxengines Blogspot inShitesh SachanNo ratings yet
- 64 Bit GSG splx30 Centos7 Rhel7 Suse12Document74 pages64 Bit GSG splx30 Centos7 Rhel7 Suse12aforabadNo ratings yet
- My Buddy: Delhi Public School, GandhinagarDocument54 pagesMy Buddy: Delhi Public School, GandhinagarHimani AggarwalNo ratings yet
- ResultPaperI PDFDocument3,868 pagesResultPaperI PDFRavikumarNo ratings yet
- New Aspect For Organic Farming Practices: Controlled Crop Nutrition and Soilless AgricultureDocument6 pagesNew Aspect For Organic Farming Practices: Controlled Crop Nutrition and Soilless AgricultureIman AzrbjNo ratings yet
- Anatomy Embryology 1&2Document39 pagesAnatomy Embryology 1&2Nadeen ShahwanNo ratings yet
- Wells Fargo Combined Statement of AccountsDocument4 pagesWells Fargo Combined Statement of Accountskarely jackson lopezNo ratings yet
- A Guide To Criminal Offending and Sentencing 4Document47 pagesA Guide To Criminal Offending and Sentencing 4Jason ClarkNo ratings yet
- FulesDocument17 pagesFulesadilNo ratings yet
- People Vs SimonDocument14 pagesPeople Vs SimonLachica KeduNo ratings yet
- What Is A Rhythm Syllable? How Many Beats Are in A Rhythm?Document5 pagesWhat Is A Rhythm Syllable? How Many Beats Are in A Rhythm?marisol corpuzNo ratings yet
- Session1: Introduction To IT Planning Systems: College of EducationDocument138 pagesSession1: Introduction To IT Planning Systems: College of EducationAgodza EricNo ratings yet
- Mining Plan: M/S Gyanchandani Purshotam Stone CrusherDocument45 pagesMining Plan: M/S Gyanchandani Purshotam Stone Crushervarun2860No ratings yet
- Beneficiary & Emergency FormDocument2 pagesBeneficiary & Emergency FormreyjornNo ratings yet
- DEPT. ORDER NO. 25, S. 1974 Bilingual Education PolicyDocument11 pagesDEPT. ORDER NO. 25, S. 1974 Bilingual Education Policygeomel duke enriquezNo ratings yet
- LAS For Organization and Management (Grade 11)Document7 pagesLAS For Organization and Management (Grade 11)rosellerNo ratings yet
- The Restoration of Tsas Soma Mosque Leh, Ladakh, India PDFDocument22 pagesThe Restoration of Tsas Soma Mosque Leh, Ladakh, India PDFreza32393No ratings yet
- Kothis and KarbalaDocument3 pagesKothis and KarbalaMahak GuptaNo ratings yet
- Jts Templates For JosephDocument41 pagesJts Templates For JosephCharlie M LozaritaNo ratings yet
- NPI2Document4 pagesNPI2Jerome AsuncionNo ratings yet
- Dimension of Corporate Accountability Across All Business SectorsDocument22 pagesDimension of Corporate Accountability Across All Business SectorsJayvee M FelipeNo ratings yet
- Practical Ent AbridgedDocument17 pagesPractical Ent AbridgedAishaNo ratings yet
- QM-001 QMS-Quality ManualDocument13 pagesQM-001 QMS-Quality ManualFERNANDO MORANTESNo ratings yet
- EXPERT-JSA Structural, Piping & Welding WorksDocument9 pagesEXPERT-JSA Structural, Piping & Welding Worksarun vijayNo ratings yet