You might also like
- 4) Lumbar Spinous Push Technique (Type IV), Iliomamillary PushDocument3 pages4) Lumbar Spinous Push Technique (Type IV), Iliomamillary PushNoorAkNo ratings yet
- CLIN 4801 Tutorials On Descriptive ListingsDocument5 pagesCLIN 4801 Tutorials On Descriptive Listingsjoe joeNo ratings yet
- Cat 2Document5 pagesCat 2Edgardo BivimasNo ratings yet
- Understanding The Stretch ReflexDocument2 pagesUnderstanding The Stretch ReflexJingyan ZhangNo ratings yet
- Roods ApprochDocument59 pagesRoods Approchsridhar_physioNo ratings yet
- A Unifying Neuro-Fasciagenic Model of Somatic Dysfunction e Underlying Q6 Mechanisms and Treatment e Part IIDocument19 pagesA Unifying Neuro-Fasciagenic Model of Somatic Dysfunction e Underlying Q6 Mechanisms and Treatment e Part IITameemNo ratings yet
- Lecture 1: Lumbar: Indirect ObjectivesDocument11 pagesLecture 1: Lumbar: Indirect ObjectiveseugeniaNo ratings yet
- TECH 614 Full Spine I (Castellucci)Document10 pagesTECH 614 Full Spine I (Castellucci)Robert StraubNo ratings yet
- Temporal Sphenoidal Line T2Document3 pagesTemporal Sphenoidal Line T2taichi7No ratings yet
- OPP Course Review: John Garlitz, DO Deborah Schmidt, DO Opp 2 April 15, 2015 8:10 AMDocument248 pagesOPP Course Review: John Garlitz, DO Deborah Schmidt, DO Opp 2 April 15, 2015 8:10 AMmina botross100% (1)
- CV4 EfectDocument21 pagesCV4 EfectNicole HermosillaNo ratings yet
- ManualDocument95 pagesManualcristina_c_43No ratings yet
- Clinical Examination of The Shoulder: Chapter Contents Referred PainDocument13 pagesClinical Examination of The Shoulder: Chapter Contents Referred Painvein94No ratings yet
- Osteopathy ProspectusDocument20 pagesOsteopathy Prospectussdun7No ratings yet
- Kinetic Control Cap1Document17 pagesKinetic Control Cap1Yennifer Serna MoncadaNo ratings yet
- 1400 - Still Technique For OOADocument17 pages1400 - Still Technique For OOAFinish Your WorkNo ratings yet
- Effect of Cranial Osteopathic Manipulative MedicinDocument8 pagesEffect of Cranial Osteopathic Manipulative MedicinGiovanniNo ratings yet
- Chapman S Points PDFDocument40 pagesChapman S Points PDFPiquetaNo ratings yet
- Tendon Neuroplastic TrainingDocument9 pagesTendon Neuroplastic TrainingLara VitorNo ratings yet
- Chiropractic Technique Principles and Procedures 3Document22 pagesChiropractic Technique Principles and Procedures 3Colors of LifeNo ratings yet
- Scapular-Stabilization Exercises - Early-Intervention PrescriptionDocument6 pagesScapular-Stabilization Exercises - Early-Intervention PrescriptionJohnnySnow100% (1)
- Passive Scapular Adduction TestDocument15 pagesPassive Scapular Adduction Testapi-468597987No ratings yet
- 20998044B6D069 PDFDocument24 pages20998044B6D069 PDFjfjjfjfjjfjfNo ratings yet
- Peripheral Nerve Disorders & ManagementDocument60 pagesPeripheral Nerve Disorders & ManagementJibreel Alban100% (1)
- Turocy StainCounterstrain LabPATS06ADocument53 pagesTurocy StainCounterstrain LabPATS06Awillone08No ratings yet
- Tissue Provocation TherapiesDocument7 pagesTissue Provocation TherapiesdracoscribdNo ratings yet
- TIFF 2023 Programme Book - Online Edition - 17 Aug 2023Document324 pagesTIFF 2023 Programme Book - Online Edition - 17 Aug 2023CathyNo ratings yet
- Pubid 1172335382Document9 pagesPubid 1172335382locoproanimal0% (1)
- Interactions between the Craniomandibular System and Cervical Spine: The influence of an unilateral change of occlusion on the upper cervical range of motionFrom EverandInteractions between the Craniomandibular System and Cervical Spine: The influence of an unilateral change of occlusion on the upper cervical range of motionNo ratings yet
- Mitchell Et Al. (2009) Reflex Mechanisms Lack of ContributionDocument16 pagesMitchell Et Al. (2009) Reflex Mechanisms Lack of ContributionRafael RodriguesNo ratings yet
- WWW - Chiropractic SportsDocument5 pagesWWW - Chiropractic Sportsapi-3714923No ratings yet
- Sample: New Office Patient Patient: - DateDocument1 pageSample: New Office Patient Patient: - DatesatyajeetNo ratings yet
- The Dislocated Brain: Innovation in Traumatic Brain Injury and IrrigationFrom EverandThe Dislocated Brain: Innovation in Traumatic Brain Injury and IrrigationRating: 5 out of 5 stars5/5 (2)
- Autonomic Nervous System: DR S S Ranasinghe CNTH - RagamaDocument63 pagesAutonomic Nervous System: DR S S Ranasinghe CNTH - RagamawellawalalasithNo ratings yet
- Intro To OMT: Stacia Sloane, DODocument37 pagesIntro To OMT: Stacia Sloane, DOJeremy100% (1)
- NOV Neuro Exam SampleDocument1 pageNOV Neuro Exam SamplesatyajeetNo ratings yet
- Find The Subluxation - Accept Where You FindDocument1 pageFind The Subluxation - Accept Where You FindgonsteadtruthNo ratings yet
- Chiropractic - in New Zealand - Report 1979Document398 pagesChiropractic - in New Zealand - Report 1979vicarofskeptic100% (1)
- BJ Palmer Clinic GenFinal CompressedDocument105 pagesBJ Palmer Clinic GenFinal CompressedMaria Vitoria CarvalhoNo ratings yet
- TENSDocument20 pagesTENSchandran2679100% (2)
- InterX 5002 Professional - InterXClinicDocument4 pagesInterX 5002 Professional - InterXClinicsalmazzNo ratings yet
- 2014 Helsinki Workshop Material ShacklockDocument43 pages2014 Helsinki Workshop Material ShacklockAl100% (1)
- Joint Mobilizations PDFDocument1 pageJoint Mobilizations PDFErik TellezNo ratings yet
- ConstipationDocument22 pagesConstipationash ash100% (1)
- Lossing DiagnosingTreatingDu PDFDocument33 pagesLossing DiagnosingTreatingDu PDFDiana SchlittlerNo ratings yet
- 4th Lecture HeadNeck and LympaticsDocument77 pages4th Lecture HeadNeck and LympaticsJeffrey Valdez Esteron100% (1)
- Atlas Medical Product Catalogue 2019-2020 PDFDocument31 pagesAtlas Medical Product Catalogue 2019-2020 PDFfahad.nationalgrainsNo ratings yet
- Case Report Example and AbstractDocument8 pagesCase Report Example and AbstractMyra Lyn OloresNo ratings yet
- ICF-Ankle Trimalleolar FractureDocument18 pagesICF-Ankle Trimalleolar FracturedvenumohanNo ratings yet
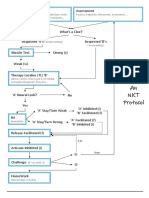
- NKT FlowChart - PDF Version 1 PDFDocument2 pagesNKT FlowChart - PDF Version 1 PDFJay SarkNo ratings yet
- Chapman's Reflexes Chapter (Edited 9.25.12) (Dragged) PDFDocument1 pageChapman's Reflexes Chapter (Edited 9.25.12) (Dragged) PDFobliquelyNo ratings yet
- Neuro AnatomyDocument26 pagesNeuro Anatomymeryclave345No ratings yet
- The Helical Ventricular Myocardial Band of Torrent-GuaspDocument5 pagesThe Helical Ventricular Myocardial Band of Torrent-GuaspTeaKovacevicNo ratings yet
- DN em Trigger Points No AbdomemDocument9 pagesDN em Trigger Points No AbdomemraulNo ratings yet
- Poster Tecnica Vertebrale InglDocument1 pagePoster Tecnica Vertebrale InglOnofrei Oana ElenaNo ratings yet
- Tensegrity CalculationsDocument4 pagesTensegrity CalculationsAlex BrandãoNo ratings yet
- Dissertation Alex Brandao-FinalDocument101 pagesDissertation Alex Brandao-FinalAlex BrandãoNo ratings yet
- Alex Brandao - MSCDocument50 pagesAlex Brandao - MSCAlex BrandãoNo ratings yet
- Dissertation Alex Brandao-FinalDocument101 pagesDissertation Alex Brandao-FinalAlex BrandãoNo ratings yet
- Alex Brandao: International Journal of Mechanical SciencesDocument1 pageAlex Brandao: International Journal of Mechanical SciencesAlex BrandãoNo ratings yet
- PHD Proposal - Alex BrandaoDocument23 pagesPHD Proposal - Alex BrandaoAlex BrandãoNo ratings yet
- A Literature Review of Tensegrity by Brigitte ServatiusDocument79 pagesA Literature Review of Tensegrity by Brigitte ServatiusTensegrity WikiNo ratings yet
- Overview of Tensegrity - I: Basic Structures: Engineering MECHANICS, Vol. 21, 2014, No. 5, P. 355-367Document13 pagesOverview of Tensegrity - I: Basic Structures: Engineering MECHANICS, Vol. 21, 2014, No. 5, P. 355-367عمرو دراغمةNo ratings yet
- Overview of Tensegrity - I: Basic Structures: Engineering MECHANICS, Vol. 21, 2014, No. 5, P. 355-367Document13 pagesOverview of Tensegrity - I: Basic Structures: Engineering MECHANICS, Vol. 21, 2014, No. 5, P. 355-367عمرو دراغمةNo ratings yet
- Tensegrity Frameworks, Static Analysis Review by Juan and TurDocument40 pagesTensegrity Frameworks, Static Analysis Review by Juan and TurTensegrity WikiNo ratings yet
- 2006 2006 2005 2005 2004 2006 2005k To Be Exact? A) B) C) D) E)Document3 pages2006 2006 2005 2005 2004 2006 2005k To Be Exact? A) B) C) D) E)Alex BrandãoNo ratings yet
- Tensegrity Frameworks, Static Analysis Review by Juan and TurDocument40 pagesTensegrity Frameworks, Static Analysis Review by Juan and TurTensegrity WikiNo ratings yet
- Wave Propagation in Structures-An FFT-Based Spectral Analysis Methodology - J F Doyle 1sr Ed, 1989Document266 pagesWave Propagation in Structures-An FFT-Based Spectral Analysis Methodology - J F Doyle 1sr Ed, 1989tmaNo ratings yet
- Wave Propagation in Structures-An FFT-Based Spectral Analysis Methodology - J F Doyle 1sr Ed, 1989Document266 pagesWave Propagation in Structures-An FFT-Based Spectral Analysis Methodology - J F Doyle 1sr Ed, 1989tmaNo ratings yet
- Scanned With CamscannerDocument5 pagesScanned With CamscannerAlex BrandãoNo ratings yet
- Nonlinear Investigation of Chaos and Hyperchaos in A 2-DOF Shape Memory OscilatorDocument9 pagesNonlinear Investigation of Chaos and Hyperchaos in A 2-DOF Shape Memory OscilatorAlex BrandãoNo ratings yet
- AL GabaritoLista 1a13Document12 pagesAL GabaritoLista 1a13Alex BrandãoNo ratings yet
- Nonlinear Investigation of Chaos and Hyperchaos in A 2-DOF Shape Memory OscilatorDocument9 pagesNonlinear Investigation of Chaos and Hyperchaos in A 2-DOF Shape Memory OscilatorAlex BrandãoNo ratings yet
- Rounding Error Analysis of The Classical Gram-SchmDocument13 pagesRounding Error Analysis of The Classical Gram-SchmAlex BrandãoNo ratings yet
- Rayleigh Rainflow StudyDocument4 pagesRayleigh Rainflow StudyAlex BrandãoNo ratings yet
- AVMM Ch08Document13 pagesAVMM Ch08Alex BrandãoNo ratings yet
- Christoforou1998 PDFDocument15 pagesChristoforou1998 PDFAlex BrandãoNo ratings yet
- Notes LagrangeDocument8 pagesNotes LagrangeLennard PangNo ratings yet
- A Comparison of Distributed Optimal Power Flow AlgorithmsDocument6 pagesA Comparison of Distributed Optimal Power Flow AlgorithmsVemalaiah KasiNo ratings yet
- Routing Problem Is To Interconnect Each P: Clock-Tree Synthesis (CTS) : Make The Clock Nets A TreeDocument23 pagesRouting Problem Is To Interconnect Each P: Clock-Tree Synthesis (CTS) : Make The Clock Nets A TreeToshik JoshiNo ratings yet
- Psoc CH 4 ZubDocument96 pagesPsoc CH 4 ZubEngr Umer CheemaNo ratings yet
- Modern Pharmaceutics - Optimization TechniquesDocument20 pagesModern Pharmaceutics - Optimization TechniquessadasonlineNo ratings yet
- Mathematics For Economics (ECON 104)Document51 pagesMathematics For Economics (ECON 104)Experimental BeXNo ratings yet
- (Cambridge Surveys of Economic Literature) Anthony C. Fisher - Resource and Environmental Economics - Cambridge University Press (1981) PDFDocument297 pages(Cambridge Surveys of Economic Literature) Anthony C. Fisher - Resource and Environmental Economics - Cambridge University Press (1981) PDFnabeelNo ratings yet
- Econ11 HW PDFDocument207 pagesEcon11 HW PDFAlbertus MuheuaNo ratings yet
- Engineering: Lecture Notes inDocument398 pagesEngineering: Lecture Notes inniniaNo ratings yet
- CalcIII Complete Solutions PDFDocument483 pagesCalcIII Complete Solutions PDFNishant Kumar100% (1)
- 1breohbaq 289967Document94 pages1breohbaq 289967Mac JeffersonNo ratings yet
- Introduction To Modeling of Structures Using Opensees: Maha Kenawy, PH.DDocument53 pagesIntroduction To Modeling of Structures Using Opensees: Maha Kenawy, PH.DMohamed YasserNo ratings yet
- Math 1st ExamDocument91 pagesMath 1st ExamFaisal Ahsan SadmanNo ratings yet
- Erke Wang-Ansys ContactDocument42 pagesErke Wang-Ansys ContactSagarKBL100% (1)
- Consumer OptimisationDocument23 pagesConsumer OptimisationSuraj SukraNo ratings yet
- Resource EconomicsDocument24 pagesResource EconomicsAltankhuyag BattuvshinNo ratings yet
- OLG Review QuestionsDocument14 pagesOLG Review QuestionsJason SNo ratings yet
- Mathematics For Machine LearningDocument52 pagesMathematics For Machine LearningVaibhav PathakNo ratings yet
- Chapter 7-Dynamic OptimizationDocument43 pagesChapter 7-Dynamic OptimizationLou MohamedNo ratings yet
- 4 Handling Constraints: F (X) X R C J 1, - . - , M C 0, K 1, - . - , MDocument10 pages4 Handling Constraints: F (X) X R C J 1, - . - , M C 0, K 1, - . - , MverbicarNo ratings yet
- Ada 225791Document167 pagesAda 225791costi_sncNo ratings yet
- Economic DispatchDocument37 pagesEconomic DispatchHasan KurniawanNo ratings yet
- Math202 Calculus2Document51 pagesMath202 Calculus2Weirdly GGNo ratings yet
- 4 Chapter 21 Non Linear ProgrammingDocument37 pages4 Chapter 21 Non Linear ProgrammingMir Md Mofachel HossainNo ratings yet
- DDMR Trajectory Tracking With Using Pid and Kinematic Based Backstepping ControllerDocument15 pagesDDMR Trajectory Tracking With Using Pid and Kinematic Based Backstepping ControllerAbdrahmane BenaouadNo ratings yet
- Notes 3Document8 pagesNotes 3Sriram BalasubramanianNo ratings yet
- Week 3: Lectures 8-9 Derivatives and Anti-Derivatives: Some Techniques With ExamplesDocument14 pagesWeek 3: Lectures 8-9 Derivatives and Anti-Derivatives: Some Techniques With ExamplesKristel AndreaNo ratings yet
- SyllabusDocument1 pageSyllabusAsrith KakumanuNo ratings yet
- Tutorial Topic 1 (1-10)Document10 pagesTutorial Topic 1 (1-10)fatin HumairaNo ratings yet