You might also like
- Satellite Communications: Principles and ApplicationsFrom EverandSatellite Communications: Principles and ApplicationsRating: 5 out of 5 stars5/5 (2)
- CCNA Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesFrom EverandCCNA Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesNo ratings yet
- Sensor Networks Medium Access Control ProtocolsDocument37 pagesSensor Networks Medium Access Control ProtocolsakttripathiNo ratings yet
- Ee 122: Ethernet: Ion Stoica Tas: Junda Liu, DK Moon, David ZatsDocument39 pagesEe 122: Ethernet: Ion Stoica Tas: Junda Liu, DK Moon, David Zatsعمر خالد المسلمانيNo ratings yet
- MAC Layer Design for Wireless Sensor NetworksDocument31 pagesMAC Layer Design for Wireless Sensor Networksijaved88100% (1)
- Medium Access Layer For Wireless Sensor Networks: T.G.Venkatesh Electrical Engineering Indian Institute of TechnologyDocument60 pagesMedium Access Layer For Wireless Sensor Networks: T.G.Venkatesh Electrical Engineering Indian Institute of TechnologyBhuvaneswari BalachanderNo ratings yet
- Link LayerDocument27 pagesLink LayerNuge SoloNo ratings yet
- EEL 6591, Wireless NetworksDocument60 pagesEEL 6591, Wireless NetworkssemeraldNo ratings yet
- MAC II: Collision Avoidance and Controlled Random Access: ReadingDocument40 pagesMAC II: Collision Avoidance and Controlled Random Access: ReadingJesmin MostafaNo ratings yet
- Advanced Lab in Computer Communications: Meeting 3 - Wi-Fi 802.11Document29 pagesAdvanced Lab in Computer Communications: Meeting 3 - Wi-Fi 802.11ferronatto11No ratings yet
- Ad-Hoc & Sensor Networks IV Year II SemDocument53 pagesAd-Hoc & Sensor Networks IV Year II SemJitendra KingNo ratings yet
- MAC Protocols for Ad-Hoc Wireless NetworksDocument46 pagesMAC Protocols for Ad-Hoc Wireless Networkssai tharunNo ratings yet
- Ad Hoc and Sensor Networks5Document37 pagesAd Hoc and Sensor Networks5Aamir HabibNo ratings yet
- Wireless LanDocument26 pagesWireless LanGary TanNo ratings yet
- Energy-Efficient MAC Protocols for Wireless Sensor NetworksDocument33 pagesEnergy-Efficient MAC Protocols for Wireless Sensor NetworksaralimaradNo ratings yet
- An Energy-Efficient MAC Protocol For Wireless Sensor NetworksDocument30 pagesAn Energy-Efficient MAC Protocol For Wireless Sensor NetworksmeenaNo ratings yet
- MAC Protocols For Ad Hoc Wireless NetworksDocument91 pagesMAC Protocols For Ad Hoc Wireless Networks188W1A04B0-SEC-B Vankeswaram Bhargava SandeepNo ratings yet
- MAC Access Methods OverviewDocument25 pagesMAC Access Methods OverviewjoanjorrisNo ratings yet
- MAC ProtocolsDocument49 pagesMAC ProtocolsAkshay KumarNo ratings yet
- Z-MAC: Hybrid MAC For Wireless Sensor NetworksDocument58 pagesZ-MAC: Hybrid MAC For Wireless Sensor Networksritesh_necNo ratings yet
- Ethernet: Understanding the Fundamental Networking TechnologyDocument39 pagesEthernet: Understanding the Fundamental Networking TechnologyMario_LeonardoNo ratings yet
- IoT Module-5 NotesDocument6 pagesIoT Module-5 Notessachin mNo ratings yet
- Lecture 6Document29 pagesLecture 6thelostheaven22No ratings yet
- Data-Link Layer (Part 2)Document83 pagesData-Link Layer (Part 2)Muhammad Zeeshan AliNo ratings yet
- Unit 2 WholeDocument24 pagesUnit 2 Wholepriya nmNo ratings yet
- WSN Unit-3Document89 pagesWSN Unit-3mr8566No ratings yet
- Crib SheetDocument2 pagesCrib SheetAda LovelaceNo ratings yet
- Internet of Things: (Lecture 9)Document34 pagesInternet of Things: (Lecture 9)Qasim FarooqNo ratings yet
- Lecture 10: Physical and Link LayersDocument33 pagesLecture 10: Physical and Link LayersAsanka SamaranayakeNo ratings yet
- Mobile Ad Hoc Network Routing and ProtocolsDocument105 pagesMobile Ad Hoc Network Routing and ProtocolsSalman AwanNo ratings yet
- Lecture06 Mac CsmaDocument12 pagesLecture06 Mac CsmaDr. Pallabi SaikiaNo ratings yet
- Wifi Networks: Ieee 802.11B Wireless Lans: Carey Williamson Department of Computer Science University of CalgaryDocument17 pagesWifi Networks: Ieee 802.11B Wireless Lans: Carey Williamson Department of Computer Science University of CalgaryOtmane OualiNo ratings yet
- Wireless MAC Protocols Seminar at UVADocument48 pagesWireless MAC Protocols Seminar at UVAsureshh52No ratings yet
- sc250 04 12Document44 pagessc250 04 12D2p6 D2p6No ratings yet
- MODEL HOME WORK --- 3: CSMA/CA AdvantagesDocument6 pagesMODEL HOME WORK --- 3: CSMA/CA AdvantagesKritesh ThakurNo ratings yet
- Wsnrouting10 2017Document82 pagesWsnrouting10 2017Ritu ParnaNo ratings yet
- MAC Layer Protocols for Wireless Sensor Networks: S-MAC, T-MAC, B-MAC, P-MAC and Z-MACDocument29 pagesMAC Layer Protocols for Wireless Sensor Networks: S-MAC, T-MAC, B-MAC, P-MAC and Z-MACSrinivas GopisettiNo ratings yet
- Mac Protocols For Wireless Sensor Networks: ContentsDocument28 pagesMac Protocols For Wireless Sensor Networks: ContentsmehatazNo ratings yet
- Part 3 802.11 MAC - 2 PDFDocument19 pagesPart 3 802.11 MAC - 2 PDFVilchez Vera MNo ratings yet
- Smac ProtocolDocument28 pagesSmac ProtocolPraveen HongalNo ratings yet
- Ad Hoc PPTDocument85 pagesAd Hoc PPTPavan KrishnaNo ratings yet
- Chapter2.3 MACDocument74 pagesChapter2.3 MACJanvi SahuNo ratings yet
- MOBILE COMPUTING: MACA AND MOBILE IPDocument87 pagesMOBILE COMPUTING: MACA AND MOBILE IPTHAKUR POLYTECHNICNo ratings yet
- Chapter Five: Local Area Networking TechnologyDocument38 pagesChapter Five: Local Area Networking TechnologyAbera BrhanuNo ratings yet
- Directional Mac With Deafness Solution For Ad Hoc NetworkDocument6 pagesDirectional Mac With Deafness Solution For Ad Hoc Networkashish chaturvediNo ratings yet
- Wireless Ad Hoc & Sensor Networks Wireless Ad Hoc & Sensor NetworksDocument14 pagesWireless Ad Hoc & Sensor Networks Wireless Ad Hoc & Sensor NetworksSantosh Aditya Sharma ManthaNo ratings yet
- Lecture 6Document34 pagesLecture 6Aeman AkramNo ratings yet
- CS578: Internet of Things: IEEE 802.15.4eDocument29 pagesCS578: Internet of Things: IEEE 802.15.4eshubhamNo ratings yet
- Wireless Medium Access Control Protocols: CS 851 Seminar University of VirginiaDocument47 pagesWireless Medium Access Control Protocols: CS 851 Seminar University of Virginiakenjo138No ratings yet
- ComputerNetwork C4 en FinalDocument77 pagesComputerNetwork C4 en FinalTRẦN PHƯỚC THÔNGNo ratings yet
- Chapter 5 - Local Area Network TechnologyDocument35 pagesChapter 5 - Local Area Network Technologyfnata AiNo ratings yet
- CS 305 Data Link Layer and Ethernet FundamentalsDocument22 pagesCS 305 Data Link Layer and Ethernet Fundamentalsmi hNo ratings yet
- Chapter6MAC LayerDocument35 pagesChapter6MAC LayerMd NehalNo ratings yet
- WSNS: Mac: Ad Hoc Wireless Networks: Architectures and Protocols IEEE Personal Communications Wireless Sensor NetworksDocument12 pagesWSNS: Mac: Ad Hoc Wireless Networks: Architectures and Protocols IEEE Personal Communications Wireless Sensor NetworksManoj Kumar GNo ratings yet
- Ethernet 552Document3 pagesEthernet 552Vani SivasankarNo ratings yet
- Networks NotesDocument5 pagesNetworks NotesSukhwinderNo ratings yet
- MAC ProtocolsDocument18 pagesMAC ProtocolsatoznsNo ratings yet
- EthernetDocument19 pagesEthernetRebeca García FrancoNo ratings yet
- Cs6003-Ad hoc and sensor MAC protocolsDocument15 pagesCs6003-Ad hoc and sensor MAC protocolsVijayaprabaNo ratings yet
- Computer Networks - MACDocument61 pagesComputer Networks - MACBala ChuppalaNo ratings yet
- Medium Acess ControlDocument46 pagesMedium Acess ControlPritish RoutNo ratings yet
- Medium Acess ControlDocument46 pagesMedium Acess ControlPritish RoutNo ratings yet
- Comparison of Different Manet Routing Protocols in Wireless Ad-Hoc Networks Using G-SenseDocument44 pagesComparison of Different Manet Routing Protocols in Wireless Ad-Hoc Networks Using G-SensemakNo ratings yet
- 9 Ad-HocDocument40 pages9 Ad-HocImranNo ratings yet
- Sphereical Ionisationising Reticulate FormsDocument6 pagesSphereical Ionisationising Reticulate Formsicicle900No ratings yet
- Sphereical Ionisationising Reticulate FormsDocument6 pagesSphereical Ionisationising Reticulate Formsicicle900No ratings yet
- April 2016Document4 pagesApril 2016Albert CorderoNo ratings yet
- 2015 Idmp Employee Intentions Final PDFDocument19 pages2015 Idmp Employee Intentions Final PDFAstridNo ratings yet
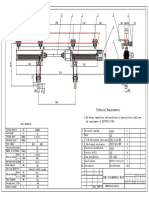
- 2X16-24 Monorail Hoist-04 - 2Document1 page2X16-24 Monorail Hoist-04 - 2RafifNo ratings yet
- DataSheet ULCAB300Document2 pagesDataSheet ULCAB300Yuri OliveiraNo ratings yet
- TU20Document6 pagesTU20Manikumar KNo ratings yet
- Diesel Injector FailureDocument19 pagesDiesel Injector FailureWayne Mcmeekan100% (2)
- Auditing Theory - Audit ReportDocument26 pagesAuditing Theory - Audit ReportCarina Espallardo-RelucioNo ratings yet
- Telecommunications: Office of The Communications Authority (OFCA)Document2 pagesTelecommunications: Office of The Communications Authority (OFCA)ChiWoTangNo ratings yet
- Somya Bhasin 24years Pune: Professional ExperienceDocument2 pagesSomya Bhasin 24years Pune: Professional ExperienceS1626No ratings yet
- Syllabus For Professional DevelopmentDocument2 pagesSyllabus For Professional DevelopmentMeganNo ratings yet
- Manual Micro DNC 2dDocument31 pagesManual Micro DNC 2dDiego GarciaNo ratings yet
- HMSWeb - Handover Management SystemDocument21 pagesHMSWeb - Handover Management SystemGG GRNo ratings yet
- Adb Doc Easa Reliance 8 Centerline Stopbar Declaracao de Conformidade EasaDocument2 pagesAdb Doc Easa Reliance 8 Centerline Stopbar Declaracao de Conformidade Easagiant360No ratings yet
- Report On Indian Education SystemDocument7 pagesReport On Indian Education SystemYashvardhanNo ratings yet
- Coordination in Distributed Agile Software Development: A Systematic ReviewDocument12 pagesCoordination in Distributed Agile Software Development: A Systematic ReviewAbdul Shakoor sabirNo ratings yet
- Order From U.S. Disctrict Judge Jesus G. Bernal To Chino Valley UnifiedDocument9 pagesOrder From U.S. Disctrict Judge Jesus G. Bernal To Chino Valley UnifiedBeau YarbroughNo ratings yet
- Operating Instructions MA 42 - Maico Diagnostics PDFDocument28 pagesOperating Instructions MA 42 - Maico Diagnostics PDFJuan PáezNo ratings yet
- Autoencoder Asset Pricing ModelsDocument22 pagesAutoencoder Asset Pricing ModelsEdson KitaniNo ratings yet
- MCP Lab Manual C-16Document62 pagesMCP Lab Manual C-16siri.pogula67% (6)
- IWR 0174 Ed12 - Jabra Headsets Amplifiers - OmniPCXplatforms - SoftphonesDocument83 pagesIWR 0174 Ed12 - Jabra Headsets Amplifiers - OmniPCXplatforms - SoftphonesAsnake TegenawNo ratings yet
- Describe The Financial and Non-Financial Benefits of Strategic Management 4.1 Financial Benefits of Strategic ManagementDocument3 pagesDescribe The Financial and Non-Financial Benefits of Strategic Management 4.1 Financial Benefits of Strategic ManagementAlemayehu Demeke80% (5)
- Oop Lab 1 MHDDocument13 pagesOop Lab 1 MHDMaahd JunaidNo ratings yet
- Advance Corporate StrategyDocument2 pagesAdvance Corporate StrategyPassionate_to_LearnNo ratings yet
- DRW Questions 2Document16 pagesDRW Questions 2Natasha Elena TarunadjajaNo ratings yet
- PMDC Renewal FormDocument3 pagesPMDC Renewal FormAmjad Ali100% (1)
- Meritor 210 220 230 240 2SpeedSingleAxlesDocument27 pagesMeritor 210 220 230 240 2SpeedSingleAxlesYhojan DiazNo ratings yet
- Facilitate Training Session Powerpoint PresentationDocument16 pagesFacilitate Training Session Powerpoint Presentationscribdhie100% (2)
- ClassifiedrecordsDocument23 pagesClassifiedrecordsChetana SJadigerNo ratings yet
- Ict OhsDocument26 pagesIct Ohscloyd mark cabusogNo ratings yet
- Incidentrequest Closed Monthly JunDocument250 pagesIncidentrequest Closed Monthly Junأحمد أبوعرفهNo ratings yet